操作高压开关柜机器人分合闸方法、装置、介质及设备与流程
本发明涉及电力检修,特别是涉及操作高压开关柜机器人分合闸方法、装置、介质及设备。
背景技术:
1、对于高压开关柜的检修中,需要将高压开关柜进行放电断开,但高压开关柜的电压一般在10kv左右,放电过程中容易发生拉弧,若人工近距离操作会危害运维人员的安全。
2、现有技术中利用机器人对高压开关柜的维护流程:首先将机器人移动到高压开关柜前,将机器人的操作模块与高压开关柜的转孔连接后,运维人员在机器人近端操作机器人,使机器人通过转孔摇出断开高压开关柜。
3、因此,寻找更安全可靠的操作机器人的方法,是本领域技术人员亟待解决的技术问题。
技术实现思路
1、针对上述现有技术的运维人员只能在机器人近端操作机器人的问题,本发明的目的在于提供操作高压开关柜机器人分合闸方法、装置、介质及设备,能够让运维人员在安全区域内通过远程操作机器人对高压开关柜的断开/闭合操作,以确保运维人员的人身安全。
2、第一方面,本发明提供一种操作高压开关柜机器人分合闸方法,所述方法包括:
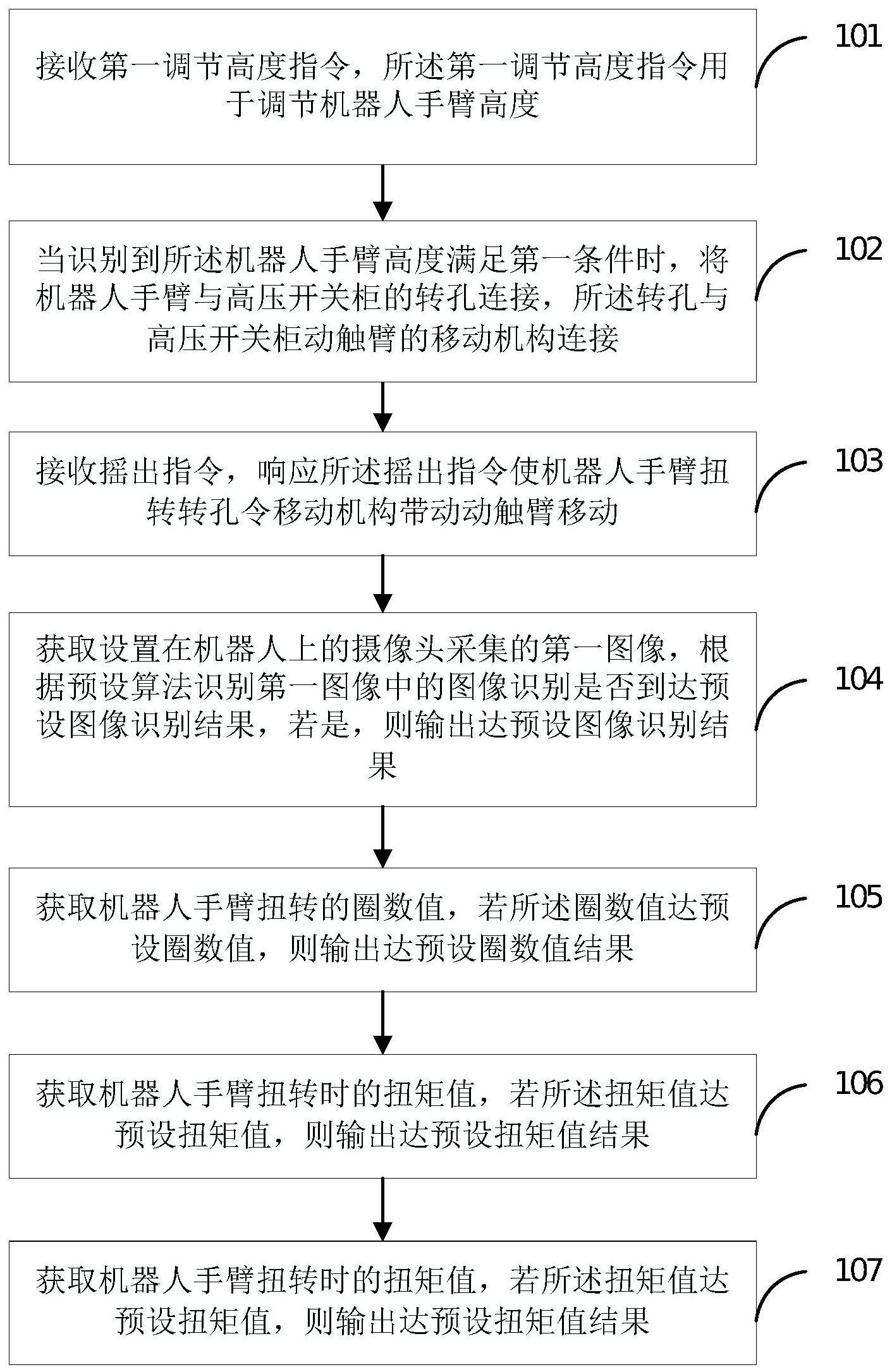
3、接收第一调节高度指令,所述第一调节高度指令用于调节机器人手臂高度;
4、当识别到所述机器人手臂高度满足第一条件时,将机器人手臂与高压开关柜的转孔连接,所述转孔与高压开关柜动触臂的移动机构连接;
5、接收摇出指令,响应所述摇出指令使机器人手臂扭转转孔令移动机构带动动触臂移动;
6、获取设置在机器人上的摄像头采集的第一图像,根据预设算法识别第一图像中的图像识别是否到达预设图像识别结果,若是,则输出达预设图像识别结果;
7、获取机器人手臂扭转的圈数值,若所述圈数值达预设圈数值,则输出达预设圈数值结果;
8、获取机器人手臂扭转时的扭矩值,若所述扭矩值达预设扭矩值,则输出达预设扭矩值结果;
9、当获取到所述达预设图像识别结果、所述达预设圈数值结果、所述达预设扭矩值结果,高压开关柜为断开状态。
10、进一步地,所述接收第一调节高度指令,所述第一调节高度指令用于调节机器人手臂高度之前的步骤,包括:
11、对待配置高压开关柜进行初始化配置,所述初始化配置包括如下步骤:
12、获取机器人手臂高度达到与转孔高度相应时的第一位点,将所述第一位点标记为触发所述第一条件的要素;
13、获取摄像头拍摄的图像及拍摄参数,将所述图像及所述拍摄参数整合后标记监测点,所述监测点用于监测高压开关柜状态变化;
14、识别监测点对应图像的识别结果并保存。
15、进一步地,所述当识别到所述机器人手臂高度满足第一条件时,将机器人手臂与高压开关柜的转孔连接,所述转孔与高压开关柜动触臂的移动机构连接,包括:
16、采集机器人手臂调节过程中摄像头拍摄的多张图像,根据多张图像中机器人手臂与转孔的相对位置进行高度修正,基于机器人手臂高度根据多张图像中高压开关柜上的设备状态仪表来进行危险告警。
17、进一步地,所述获取机器人手臂扭转时的扭矩值,若所述扭矩值达预设扭矩值,则输出达预设扭矩值结果,包括:
18、获取摄像头采集的第二图像,根据第二图像得到的高压开关柜的状态结果,基于所述状态结果修正机器人手臂扭转时的扭矩;
19、监测机器人手臂扭转时的扭矩值是否超过告警扭矩值,若超过,则发送告警信号;
20、将机器人手臂扭转时的扭矩值进行可视化展示在操作终端。
21、进一步地,所述方法还包括:
22、所述转孔设置在高压开关柜动触臂上,当机器人手臂扭转时并调节机器人手臂高度时,获取动触臂移动距离,根据动触臂移动距离调节机器人手臂高度与动触臂移动距离相对应。
23、进一步地,所述识别监测点对应图像的识别结果并保存,包括:
24、获取监测点对应图像中的目标区域,所述目标区域为高压开关柜状态指示灯所在区域,
25、基于所述目标区域颜色识别,判断高压开关柜状态,若目标区域颜色识别为绿色,则高压开关柜分闸断开状态,若目标区域颜色识别为红色,则高压开关柜为合闸闭合状态;
26、将高压开关柜分闸断开状态/高压开关柜为合闸闭合状态作为识别结果输出。
27、进一步地,所述方法还包括:
28、接收摇进指令,响应所述闭合指令使机器人手臂扭转转孔令移动机构带动动触臂移动;
29、获取设置在机器人上的摄像头采集的第二图像,根据预设算法识别第二图像中的图像识别是否到达第二预设图像识别结果,若是,则输出达第二预设图像识别结果,所述第二预设图像识别结果包括识别到动触臂上的表记高度位置达到第二预设表记位置;
30、当获取到所述达预设圈数值结果、所述达预设扭矩值结果,高压开关柜为闭合状态。
31、第二方面,本发明提供一种操作高压开关柜机器人分合闸装置,所述装置包括:
32、第一接收模块,用于接收第一调节高度指令,所述第一调节高度指令用于调节机器人手臂高度;
33、第一连接模块,用于当识别到所述机器人手臂高度满足第一条件时,将机器人手臂与高压开关柜的转孔连接,所述转孔与高压开关柜动触臂的移动机构连接;
34、第二接收模块,用于接收摇出指令,响应所述摇出指令使机器人手臂扭转转孔令移动机构带动动触臂移动;
35、第一获取模块,用于获取设置在机器人上的摄像头采集的第一图像,根据预设算法识别第一图像中的图像识别是否到达预设图像识别结果,若是,则输出达预设图像识别结果;
36、第二获取模块,用于获取机器人手臂扭转的圈数值,若所述圈数值达预设圈数值,则输出达预设圈数值结果;
37、第三获取模块,用于获取机器人手臂扭转时的扭矩值,若所述扭矩值达预设扭矩值,则输出达预设扭矩值结果;
38、结果模块,用于当获取到所述达预设图像识别结果、所述达预设圈数值结果、所述达预设扭矩值结果,高压开关柜为断开状态。
39、第三方面,本发明提供一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行如上述操作高压开关柜机器人分合闸方法的步骤。
40、第四方面,本发明提供一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如上述操作高压开关柜机器人分合闸方法的步骤。
41、根据本发明提供的操作高压开关柜机器人分合闸方法、装置、介质及设备,首先调节机器人手臂的高度,使手臂能够与转孔连接;根据接收到的指令,使机器人手臂扭转转孔令移动机构带动动触臂移动;在机器人操作过程中,采集机器人上的摄像头拍摄操作过程的图像并进行图像识别,进而识别高压开关柜的状态;及检测机器人通过转孔扭转的圈数值来监测高压开关柜动触臂的移动距离;及检测扭转的扭矩值以防止扭矩值过大出现告警,最终使得运维人员能够在机器人远端操作机器人,避免了在机器人近端操作时可能受拉弧区影响的风险,同时采用图像识别来监测高压开关柜的状态,本技术的方法更安全可靠,多方位监测以确保运维人员的人身安全。
- 还没有人留言评论。精彩留言会获得点赞!