一种针对多源干扰的飞行机械臂末端复合抗干扰控制方法
本发明属于飞行机器人控制领域,具体涉及一种针对多源干扰的飞行机械臂末端复合抗干扰控制方法,适用于执行高精度主动操作任务的飞行机械臂控制系统。
背景技术:
1、近年来,随着电子技术和材料工艺的不断提升和发展,一种由多旋翼无人机和机械臂组成可以与环境进行物理交互的飞行机械臂已经成为一个非常热门的领域,如图2所示。飞行机械臂这一能够与环境进行物理交互的能力,将其应用已扩展到各种操作任务。在与环境进行物理交互时,飞行机械臂执行器末端精度决定了其具体应用的领域。在各类操作任务中,存在一些特殊场景对飞行机械臂执行器末端的精度要求非常苛刻,例如,桥梁探测、管道检修、应急救援和狭小空间内非合作目标捕获等。因此,保证飞行机械臂执行器末端的高精度是一个迫切需要解决的关键问题。但是与传统的固定基座机械臂相比,飞行机械臂在执行任务的过程中存在着包含基座浮动干扰、模型不确定性和未知外界扰动等多源干扰,严重影响了末端执行精度。在运动学层面,一方面受到风扰和耦合干扰的影响,无人机基座存在一定的控制误差会在期望位置附近不断抖动。另一方面由于机械臂的多连杆特性,无人机基座的浮动干扰传递到执行器末端会存在误差放大效应,严重恶化了执行器末端的精度。在动力学层面,飞行机械臂中的机械臂为一个多连杆结构,质心在不断变化,精确建立其动力学模型十分困难,因此存在着一定的模型不确定性。同时飞行机械臂在执行高精度的操作任务时,机械臂会受到无人机桨叶旋转带来的下洗气流干扰影响,也会对执行器末端的精度产生一定的影响。
2、因此,为了保证飞行机械臂在多源干扰下执行器末端的高精度,完成精准操作任务,飞行机械臂的执行器复合抗干扰控制算法在设计过程中必须解决上述提到的基座浮动干扰、模型不确定性干扰和未知外界扰动的多源干扰。
3、中国发明专利cn201810010602.3提出了一种搭载并联型机械臂的带臂无人机,旋翼飞行器下方设有并联型机械臂,以提高执行器末端的控制精度,但其提出的装置存在工作空间小,执行器只能在旋翼飞行器的下方工作的问题;中国发明专利cn202123017099.0提出的旋翼飞行抓取机械臂也存在工作空间小,无法完成主动操作任务的问题。中国发明专利cn202110993793.1提出了一种将干扰观测器和h无穷控制器相结合的控制方案来处理飞行机械臂受到的多源干扰,但前提是需要获得机械臂动力学模型,而获得多自由机械臂的动力学模型十分困难;中国发明专利cn202010801707.8设计了一种干扰观测器来估计基座浮动干扰的幅值,但要求基座的浮动干扰必须为周期干扰;中国发明专利cn202110994016.9提出了一种将抗饱和控制器和外力估计器相结合的控制算法,但并未对无人机基座的浮动干扰进行处理,导致飞行机械臂末端的控制误差较大,无法满足高精度操作任务的需求;中国发明专利cn201810094313.6提出了一种基于动态重心补偿的旋翼飞行机械臂系统及算法,但存在两个问题:(1)未考虑旋翼无人机浮动对机械臂执行器末端造成的运动学干扰;(2)并未考虑机械臂运动对无人机基座造成的动力学耦合干扰。
4、上述的方法都未能解决飞行机械臂在执行任务过程中由于受到包括基座浮动干扰、模型不确定性干扰和未知外界扰动的多源干扰影响,从而恶化执行器末端精度,导致精准操作任务失败的问题。
技术实现思路
1、为克服现有方法的缺陷,对于以多旋翼无人机和多自由度机械臂组成的飞行机械臂系统,提供一种针对多源干扰的飞行机械臂执行器末端复合抗干扰控制结构,能够保证飞行机械臂在多源干扰下的执行器末端高精度,以完成各类精准操作任务。所述多源干扰包括基座浮动干扰、模型不确定性干扰和未知外界扰动。
2、为达到上述目的,本发明采用的技术方案为:
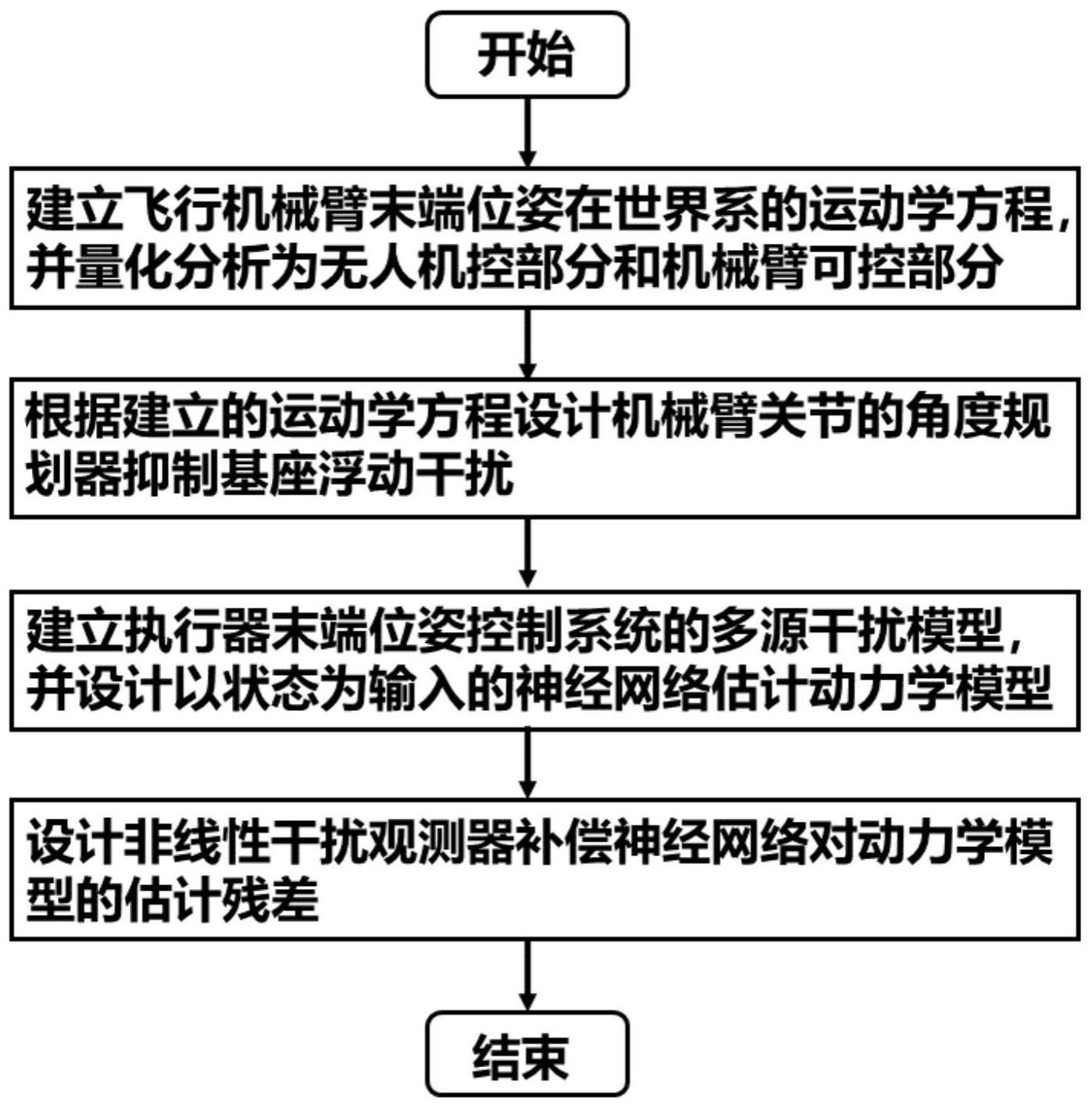
3、第一步,建立飞行机械臂执行器末端位姿在世界系下的运动学方程,并通过量化分析将其分为无人机可控部分和机械臂可控部分:
4、针对飞行机械臂的运动特点,根据齐次变换原理建立飞行机械臂执行器末端位姿的运动学模型,表示如下:
5、
6、式中,pe表示飞行机械臂执行器末端在世界系下的位置,re是飞行机械臂执行器末端在世界系下的旋转矩阵;pb表示无人机基座质心在世界系下的位置,rb是无人机质心在世界系下的旋转矩阵;表示机械臂执行器末端在无人机坐标系下的位置,表示机械臂执行器末端在无人机坐标系下的旋转矩阵;对上式进行微分,可得:
7、
8、其中,s(·)为执行叉乘操作的反对称矩阵算子。ωb和ωe分别代表无人机质心和飞行机械臂执行器末端在世界系下的角速度;和分别定义了执行器末端相对于无人机质心的线速度和角速度;根据上面两式,可得执行器末端在世界系下的表达为:
9、
10、
11、其中,代表了执行器末端相对于基座的雅各比矩阵;i3×3和03×3代表着3×3的单位矩阵和零矩阵;代表机械臂关节角的角速度。代表无人机质心在世界系下的线速度和角速度;定义执行器末端角速度与欧拉角微分之间的转换矩阵为te,无人机质心角速度与欧拉角微分之间的转换矩阵为tb,可得飞行机械臂执行器末端位姿在世界系的表达式为:
12、
13、其中,为飞行机械臂执行器末端在世界系下的位置xe的微分。为无人机质心在世界系下的位置xb的微分。根据上式可得,为无人机可控部分,为机械臂可控部分。将上式改写为如下形式:
14、
15、其中,d代表了由于无人机基座运动所带来的基座浮动干扰。当飞行机械臂在执行任务时,无人机基座通常处于准静态运动,其状态变化均较小,因此jb,tb和均为有界值。故基座浮动干扰d应为有界干扰。令b1表示基座浮动干扰的上界,即||d||≤b1。||·||代表求向量的2范数。
16、第二步,根据建立的运动学方程设计机械臂关节的角度规划器抑制基座浮动干扰:
17、首先定义飞行机械臂执行器末端在世界系下的期望位置xd,则末端的追踪误差为δx=xe-xd。设计与执行器末端追踪误差相关的势能函数为:
18、
19、其中,kp,σ和n为待设计的参数;max{θ1,θ2}表示选择θ1和θ2的较大值。为抑制无人机基座浮动带来的运动学干扰,设计机械臂关节角的参考输入信号为:
20、
21、其中δε为势能函数p(δx)对误差δx的偏导,即和分别代表矩阵t2的伪逆和转置。kd,α和a为待设计的参数。
22、第三步,建立飞行机械臂执行器末端位姿控制系统的多源干扰模型,并设计以机械臂状态为输入的神经网络估计机械臂整体动力学模型:
23、针对飞行机械臂系统的模型不确定性干扰和未知外界扰动,建立整体的机械臂系统动力学模型,并设计以机械臂状态为输入的神经网络估计机械臂整体动力学模型。动力学模型表示如下:
24、
25、其中,状态向量q,分别表示机械臂各个关节的转动角度,转动角速度和转动角加速度;τdis代表机械臂系统所受到的未知外界干扰;me(q)是机械臂系统正定的惯性矩阵标称部分,为包含了科氏力和向心力矩阵标称部分,ge(q)表示重力矩阵标称部分;为由于机械臂运动造成的模型不确定性干扰部分;τ代表系统的控制输入力矩;使用神经网络对机械臂的整体动力学模型进行估计:在神经元足够的情况下,神经网路可以估计任何非线性连续函数,表达式如下:
26、
27、其中,w为神经网络中神经元的未知理想权值矩阵,代表以状态向量q,为输入的神经网络激活函数,代表神经网络对包含模型不确定性和未知外界扰动的机械臂整体动力学模型的估计;使用ed来表示神经网络估计残差;根据上式,设计机械臂的输入力矩为:
28、
29、其中,ks,kv和ka为待设计的控制参数矩阵;为神经网络的实际估计输出;为非线性干扰观测器的实际输出;联立上面两式,可得:
30、
31、其中,代表神经元理想权值矩阵和实际权值矩阵之间的估计误差;机械臂关节角速度的跟踪误差;机械臂关节角加速度的跟踪误差;代表非线性干扰观测器的估计误差;设计神经元权值矩阵的自适应更新率为:
32、
33、其中,k2为待设计的自适应更新率参数。
34、第四步,设计非线性干扰观测器补偿神经网络的估计残差:
35、针对估计残差的特性,建立非线性干扰观测器如下:
36、
37、其中,φ为非线性干扰器的辅助变量;l为非线性干扰观测器的观测增益;对非线性干扰观测器的估计误差进行微分可得:
38、
39、则可以通过选择控制参数α,k2,γ1,γ2,γ3和γ4,以及参数矩阵l,ks和kv满足下列不等式,以保证误差δx,和最终是一致有界的,使得飞行机械臂执行器末端在包含基座浮动干扰、模型不确定性和未知外界扰动的多源干扰情况下高精度地跟踪轨迹:
40、
41、其中,i4×4代表着4×4的单位矩阵。
42、本发明与现有技术相比的优点在于:
43、本发明中涉及的一种针对包括基座浮动干扰、模型不确定性和未知外界扰动等多源干扰的飞行机械臂末端复合抗干扰控制结构,主要面向由多旋翼无人机和多自由度机械臂组成的飞行机械臂系统,能够保证飞行机械臂在多源干扰下的执行器末端高精度性能,以完成各类精准空中作业任务。相比于传统的固定基座机械臂,飞行机械臂高机动和高灵活的显著优点。但在执行任务过程中存在的多源干扰会严重恶化飞行机械臂执行器末端精度,导致精准操作任务的失败。本方法针对包含基座浮动干扰、模型不确定性和未知外界扰动等多源干扰的飞行机械臂设计了复合抗干扰控制方法,首先构建飞行机械臂执行器末端位姿在世界系下的运动学方程,然后通过量化分析将其分为无人机可控部分和机械臂可控部分,其次根据建立的运动学方程在运动学层面设计机械臂关节的角度规划器抑制基座浮动干扰,之后建立飞行机械臂执行器末端位姿控制系统的多源干扰模型,设计以机械臂状态为输入的神经网络估计机械臂整体动力学模型,最后设计非线性干扰观测器来补偿神经网络的估计残差;在动力学层面通过合理的选取神经网络和非线性干扰观测器的参数,可以显著提高飞行机械臂在多源干扰下的末端精度,保证了主动操作任务的精准完成。
- 还没有人留言评论。精彩留言会获得点赞!