一种监控一体化的电力机房巡检机器人及无人巡检方法
本发明属于电力自动化设备领域,具体涉及一种监控一体化的电力机房巡检机器人及无人巡检方法。
背景技术:
1、电力机房是为整个电网系统提供所有应用服务运营的场所,包括变电站、配电所等;电力机房是电网中发电、输电、配电、售电的数据交互连接桥梁与应用服务无缝集成的平台。电力机房中设有大量24h不间断工作的电力设备,因此需要对电力机房进行日常检查,及时发现和排除电力设备可能发生的异常或损坏,保障台区内广大电力用户的正常用电。
2、目前大部分电力机房的运维和巡检更多采取的是人工方式。这种巡检方式不但时间较长、效率较低,而且巡检结果的可靠性主要依赖技术人员的个人素质,准确性也相对较低。在巡视人员数量相对较少的情况下,日常巡检工作中也难以保证有充足的时间对每个电力机房的内外部环境、设备运行情况、光缆纤芯使用情况、电源隐患等进行全面排查。一旦在日常巡检中留下盲区,则可能会产生较大的安全隐患。此外,对于电力机房中某些特殊场所,可能会存在某些有毒有害的气体环境(如sf6),或不适宜人员进入的电学环境,这也会给人身安全带来风险。
3、随着自动化和5g高速通信技术的不断发展,技术人员正将研发的重心投入到开发专业巡检机器人上。由机器人代替人工执行电力机房的日常巡检任务。可以克服电力机房,人工巡检存在的效率、可靠性和安全性等方面的不足。机器人巡检相对人力巡检的主要有点包括:一、巡检机器人的日常维护成本远低于人工成本。二、巡检机器人的执行效率高于人工效率,并且可以长时间不间断工作。三、巡检机器人的存查结构可靠性和准确性更高,并且可以保持不发生疏漏。四、巡检机器人可以执行某些人工无法执行的巡检或处置工作。
4、电力巡检机器人虽然具有很光明的前景,但是项目研发的难度同样也是非常高的。比如,如何控制机器人在包含大量复杂设备和管线的电力机房的环境中进行移动,实现高效的自主运行。如何训练机器人对大量的设备进行识别和检查,准确完成数据采集与分析。如何精准控制机器人的动作,避免在执行异常处置时对电力设备的正常部分造成损伤。都是技术人员必须要解决的技术难题。基于上述原因,目前市场还并没有可供商用的电力巡检机器人产品,部分具有实用经验的机器人主要是由技术人员远程遥控的机器人,这些“半自动”的机器人主要用于完成某些人力无法完成的巡检或处置任务。
技术实现思路
1、为了解决现有的电力巡检机器人的自动化程度低,自动化电力巡检机器人难度大,实现成本高等问题,本发明提供一种监控一体化的电力机房巡检机器人及无人巡检方法。
2、本发明采用以下技术方案实现:
3、一种监控一体化的电力机房巡检机器人,其用于对电力机房进行常态化的巡查,并对特定的异常状态进行及时处置,该电力机房巡检机器人包括:移动平台、机械臂系统、深度相机系统,以及一个上位机。
4、其中,移动平台作为电力机房巡检机器人的行走机构;移动平台中包含定位模块并安装有至少一个激光雷达。定位模块用于采集移动平台在电力机房内部的地理坐标;激光雷达用于探测运动方向上的障碍物。
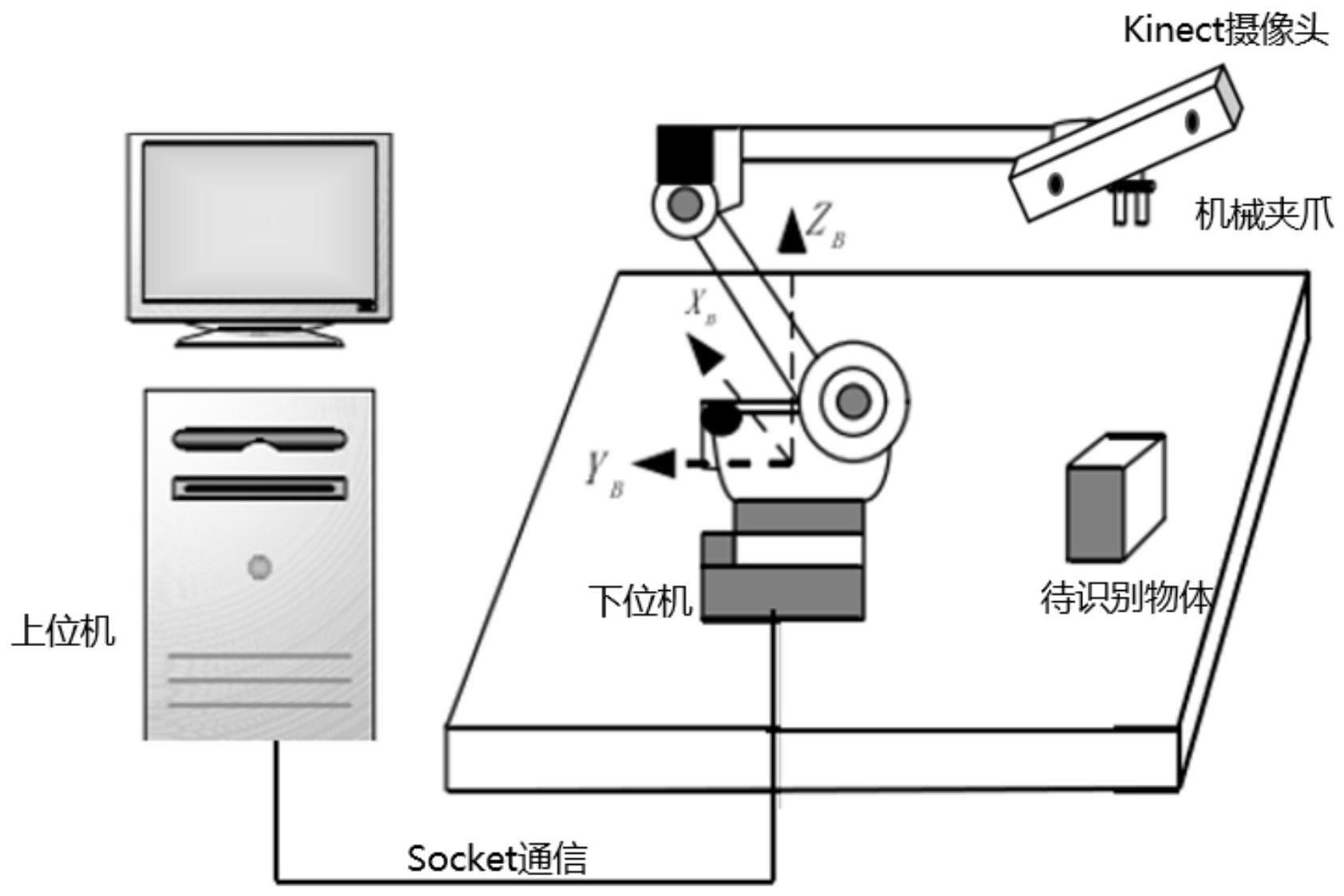
5、机械臂系统包括下位机、机械臂和末端执行机构。下位机用于控制机械臂的位姿和运动状态,下位机还用于控制末端执行机构的动作。机械臂的固定端装载在移动平台上,自由端用于安装末端执行机构。末端执行机构用于通过执行特定的动作完成相应的操控任务。
6、深度相机系统安装在机械臂的自由端,且深度相机系统与末端执行机构的任意运动轨迹均不发生干涉。深度相机的取景范围包含末端执行机构及其对应的操纵对象。
7、上位机与移动平台、机械臂系统的下位机,以及深度相机系统电连接。上位机中分别运行有:一个基于yolo v5设计的目标识别模型和目标定位模型。一个基于slam算法实现的空间虚拟化模块。一个基于navigation功能包的导航模块。以及一个基于moveit和运动学插件ikfast实现的机械臂轨迹规划模块。该上位机分别用于完成如下工作:(1)通过空间虚拟化模块生成表征机房及其内部设备的空间布局的虚拟化模型。(2)根据巡查轨迹中各轨迹点对应的深度相机与待巡查目标物的空间位置关系,通过机械臂轨迹规划模块预先生成每个轨迹点处对应的机械臂的位姿控制指令。(3)结合激光雷达和深度相机实时获取的数据,在巡查阶段通过导航模块生成一个移动平台的优化运动轨迹,并生成一系列对应的运动控制指令。(4)通过目标识别模型对深度相机实时采集的深度图像进行目标识别,然后在识别出目标后通过目标定位模型计算出目标的位置。(5)在执行操纵任务时,将目标的位置信息和机械臂系统的状态数据输入到机械臂轨迹规划模块中,求解出末端执行机构的最佳运动轨迹,并生成机械臂系统对应的运动信息队列。
8、在本发明提供的方案中,移动平台为一种agv设备,移动平台可以选择采用技术已经成熟并在市场上广泛商用的轮式机器人底盘,履带式机器人底盘,或其它任意一种仿生行走机器人。此外,本发明中的移动平台中还包括一个遥控装置,遥控装置用于对移动平台的运行状态进行人工控制,其中,遥控装置下发的运动控制指令的优先级高于上位机。
9、作为本发明进一步的改进,移动平台中激光雷达的数量为多个,并分布在移动平台的周向位置处。定位模块选择采用基于gps定位、基站定位或基站+wifi混合定位技术的产品。其中,针对本发明的室内应用环境,定位模块优先采用室内定位精度更高的混合定位技术的产品。
10、作为本发明进一步的改进,机械臂采用具有六自由度的机械臂;机械臂系统的末端执行机构采用机械夹爪或仿生多指式机械手。机械夹爪或机械手表面进行绝缘和耐磨增强处理。
11、作为本发明进一步的改进,上位机与移动平台、机械臂系统,以及深度相机系统间采用基于以太网或无线的socket通信的方式完成指令与数据的双向传输。
12、作为本发明进一步的改进,目标识别模型由yolo v5基础模型经过训练后得到,目标识别模型的输入为深度相机获取的原始rgb-d图像;目标识别模型的输出为包含对应识别目标的选择框的rgb-d图像。
13、当目标识别模块输出包含目标选择框的样本图像之后,目标定位模型通过如下步骤计算出目标物的空间位置:
14、(1)根据识别出的目标物的选择框在rgb-d图像中的像素位置以及像素区域的深度信息,计算出目标物相对相机镜头中心的第一坐标。
15、(2)根据深度相机在机械臂系统上的安装位置,将目标物的第一坐标转换为第二坐标,所述第二坐标以机械臂自由端为原点。
16、(3)根据电力机房巡检机器人在电力机房中的实时位置,将第二坐标转换为世界坐标系下的绝对坐标,得到目标物实际的空间位置。
17、作为本发明进一步的改进,上位机中还包括一个基于图卷积神经网络的特征匹配模型和一个ocr文字识别模型。特征匹配模型用于将识别出的特定目标物与数据库中目标物的典型状态图进行特征匹配,进而确定特定目标物的工作状态。ocr文字识别模型用于先对识别出的特定目标的局部区域进行图像裁剪,然后对裁剪后的图像中的文字或符号进行识别;进而确定目标物中的文字信息。
18、作为本发明进一步的改进,导航模块在进行运动轨迹优化的过程中,同时采用激光雷达和深度相机获取到的数据中的融合特征作为参考信息,并利用slam算法实现障碍物的精准识别与建模。
19、作为本发明进一步的改进,上位机中还包括一个存储模块,存储模块用于存储如下数据:电力机房巡检机器人在执行巡查任务过程中采集到的各类原始数据,根据各类原始数据分析处理得到的巡查结果,执行各类操作任务时生成的事件信息,以及完成巡查任务后记录下的日志文件。
20、本发明还提供一种电力机房的无人巡检方法,其采用如前述的监控一体化的电力机房巡检机器人,对电力机房的进行常态化的自动巡查,并对某些特定的异常事件或故障状态进行主动处置。该无人巡检方法包括如下步骤:
21、一、初始化阶段
22、s1:在初始化状态下,向电力机房巡检机器人的下达运动控制指令,对整个电力机房内部的通道进行遍历。
23、s2:上位机中的导航模块根据移动平台中定位模块记录的一系列的坐标信息生成一个初始化巡查路径。
24、其中,初始化巡查路径中还包括各个待查验的关键设备或装置对应的标记。
25、s3:机械臂轨迹规划模块根据巡查轨迹中各轨迹点对应的深度相机与待巡查目标物的空间位置关系,预先生成初始化巡查轨迹中每个轨迹点处对应的机械臂的位姿控制指令。
26、其中,位姿控制指令用于控制机械臂系统与移动平台协同运转,进而使得深度相机系统能够在移动平台移动过程中获取电力机房内部所有场所或设备的图像数据。
27、二、常态化巡查阶段
28、s4:在巡查任务按周期触发后,电力机房巡检机器人的移动平台按照初始化巡查路径在电路机房内移动。
29、s5:移动平台运行过程中,上位机中的空间虚拟化模块根据深度相机和激光雷达实时采集的数据进行空间虚拟化建模,并由导航模块根据虚拟化模型中的障碍物信息对初始化巡查路径进行优化;进而实现电力机房巡检机器人的自适应导航和避障。
30、s6:上位机实时获取或保存深度相机采集到的图像或视频数据,并通过目标识别模型对关键节点处的设备或装置进行识别。
31、s7:上位机对识别出的目标物进行特征比对或文字识别,进而确定各个关键设备或装置的实时运行状态。
32、三、事件处置阶段
33、当步骤s7中分析出任意一个设备或装置的运行状态异常,或到达电力机房控制中心下达的任务的操作对象的位置时,执行如下主动处置操作:
34、s8:由目标定位模型计算出操作对象的位置信息。
35、s9:上位机根据深度图像中目标物的景深信息的变化,控制移动平台靠近操作对象。
36、s10:到达最近操作位置后,上位机先通过目标定位模块计算出操作对象的详细位置。然后结合上位机上传的机械臂的状态数据,通过机械臂轨迹规划模块求解出末端执行机构的最佳运动轨迹,最终生成机械臂系统对应的运动信息队列并发送至下位机。
37、s11:下位机根据运动信息队列控制机械臂运动,并由末端执行机构执行相应动作,进而完成异常事件的处置或指定任务的实施。
38、s12:在完成对初始化巡查路径中所有关键节点的巡查后,结束当前的巡查任务,上位机生成一个工作日志。
39、本发明提供的技术方案,具有如下有益效果:
40、本发明提供了一种包含机械臂、移动平台和深度相机的信息电力机房巡检机器人。并机器人在执行巡检任务过程需要执行的图像识别、状态分析、路径规划,运动控制等工作通过一个独立与机器人行动机构本体的上位机来完成。进而使得巡检机器人可以在电力机房内自主完成各项巡查和应急处置工作,大幅度提高机器人的自动化程度。此外,在本发明的方案,上位还可以支持对多台机器人进行协同控制,进而降低整个机器人系统的部署成本,并通过多台机器人进一步提高工作效率。
41、本发明的方案在机械臂末端安装深度相机,深度相机可以获取物体多角度图像,并采集到目标物的深度信息,因而可以提高上位机对目标物的识别精度。同时深度图像还可以提升机器人的导航精度,增加机器人在复杂电力机房内的避障性能。
42、本发明的方案中的机器人具有故障处置功能,通过机械手可夹紧和松开物体,在机械臂末端的安装使机械手可随末端位置和位姿的变化而移动和旋转。这使机器人可对电力机房的物体进行操控,包括电闸开关的打开和关闭、按钮的旋转等,在紧急情况下机器人可关闭电闸,增加了巡检的安全性。
43、本发明采用yolov5算法识别复杂物体,对机房中仪表、开关等多种物体状态进行识别。采用端对端方式进行检测,并且将目标定位和目标分类任务合并到一个阶段进行,大大减少了目标检测所需时间,识别的相对误差较小。
- 还没有人留言评论。精彩留言会获得点赞!