一种应用于冲击试样加工中心的上下料方法及系统与流程
本发明涉及机械自动化加工,尤其涉及一种应用于冲击试样加工中心的上下料方法及系统。
背景技术:
1、夏比v型冲击试样的制备工艺复杂、工序多,一般通过锯切、铣削、磨削、开缺口等加工工序,最终达到尺寸和加工精度的要求,这个过程中涉及多台独立加工设备,大多数的加工设备需要人工干预,在不同加工设备之间进行搬运、上料、下料,劳动强度较大、效率低、容易造成安全事故,随着性能检验批量的增加,如何高效率地制备夏比v型冲击试样成为制约检验室进行力学性能测试工作中的一个瓶颈。
技术实现思路
1、为克服现有技术的不足,本发明的目的是提供一种应用于冲击试样加工中心的上下料方法及系统,通过机器视觉定位装置从摄像机获取工件的图像信息,通过控制单元对图像信息进行处理,获取工件的形状、位置和姿态,根据笛卡尔坐标系的相关变化法则对获取的位姿进行坐标变换,获得工件的空间位置,最后把位置信息传送给机器人,引导机器人完成抓取动作。
2、为实现上述目的,本发明通过以下技术方案实现:
3、一种应用于冲击试样加工中心的上下料方法,方法包括以下内容:
4、1)图像获取:设置机器视觉定位装置,机器视觉定位装置从相机获取工件的图像信息并传送至控制单元,用于待加工试样和成品试样的抓取的定位;
5、2)图像处理:通过建立视觉图像上的点位与机器人坐标系之间的对应关系,对待加工试样和成品试样进行视觉成像;
6、3)工件抓取位姿处理:根据笛卡尔坐标系的变化法则,对获取的位姿进行坐标变换,获得工件的空间位置,把获得的工件的空间位置信息传送给机器人,引导机器人完成抓取动作;
7、4)采用机器人软浮动功能,使得机器人跟随者机床夹具内工件夹紧的方向运动。
8、建立视觉图像上的点位与机器人坐标系之间的对应关系,具体包括以下步骤:
9、s1、建立图像的直角坐标系uov,其坐标(u,v)表示图像中的点的位置;
10、s2、建立一个实际空间平面上的直角坐标系xoy,设o1在uov坐标系中的坐标为(u0,v0),每个像素点在x、y轴方向上的物理尺寸为dx和dy,图像中任一个像素点所对应的空间坐标系之间的转换关系,公式如下:
11、
12、
13、以齐次矩阵表示,公式如下:
14、
15、设是空间点p在像素坐标系中的齐次坐标,公式③可用如下公式表示:
16、
17、设为空间点的齐次坐标,则有空间点与图像中的像素点之间的关系,公式如下:
18、
19、公式⑤中,f为相机焦距,单位为mm;u0,v0为图像中的像素坐标,其单位为像素;dx,dy为每个像素点在x、y轴方向上的物理尺寸,单位为mm。
20、工件抓取位姿处理,通过视觉定位引导方法实现:选一个待加工试样作为初始工件,机器人夹着工件的初始位置为(i),手动控制机器人到达另一个位置(i+1),这个过程中,机器人末端和标定工件的位姿关系始终不变,相机与机器人底座之间的位姿关系不变,公式如下:
21、tool(i)hobj(i)=tool(i+1)hobj(i+1) ⑥
22、base(i)hcam(i)=base(i+1)hcam(i+1) ⑦
23、公式⑥中,tool(i)hobj(i)为初始位置(i)时的工件(obj(i))在工具坐标系(tool(i))中的位姿矩阵;tool(i+1)hobj(i+1)为位置(i+1)时的工件(obj(i+1))在工具坐标系(tool(i+1))中的位姿矩阵;公式⑦中,base(i)hcam(i)为初始位置(i)时的相机(cam(i))在机器人基坐标系(base(i))中的位姿矩阵;base(i+1)hcam(i+1)为初始位置(i+1)时的相机(cam(i+1))在机器人基坐标系(base(i+1))中的位姿矩阵;
24、根据公式⑥和公式⑦得到公式如下:
25、tool(i)hbase(i)·base(i)hcam(i)·cam(i)hobj(i)=tool(i+1)hbase(i+1)·base(i+1)hcam(i+1)·cam(i+1)hobj(i+1) ⑧
26、公式⑧中,tool(i)hbase(i)为初始位置(i)时的机器人底座(base(i))在机器人工具坐标系(tool(i))中的位姿矩阵,base(i)hcam(i)为初始位置(i)时的相机(cam(i))在机器人基坐标系(base(i))中的位姿矩阵,cam(i)hobj(i)为初始位置(i)时的工件(obj(i))在相机坐标系(tool(i))中的位姿矩阵,tool(i+1)hbase(i+1)为位置(i+1)时的机器人底座(base(i+1))在机器人工具坐标系(tool(i+1))中的位姿矩阵,base(i+1)hcam(i+1)为位置(i+1)时的相机(cam(i+1))在机器人基坐标系(base(i+1))中的位姿矩阵,tool(i+1)hbase(i+1)为位置(i+1)时的工件(obj(i+1))在相机坐标系(tool(i+1))中的位姿矩阵;
27、对公式⑧进行整理得到公式如下:
28、tool(i+1)h-1base(i+1)·tool(i)hbase(i)·base(i)hcam(i)=base(i+1)hcam(i+1)·cam(i+1)hobj(i+1)·cam(i)h-1obj(i) ⑨
29、公式⑨中,设:a=tool(i+1)h-1base(i+1)·tool(i)hbase(i),b=cam(i+1)hobj(i+1)·cam(i)h-1obj(i),x=base(i)hcam(i)=base(i+1)hcam(i+1),公式⑨可写为由ax=xb表示的手眼标定方程,通过机器人正向运动参数求得a,用视觉系统标定物的位姿求得b,则相机与机器人底座之间的关系x即可求得。
30、机器人软浮动功能为:开启机器人的六个关节轴或者直角坐标系的六个自由度的软浮动。
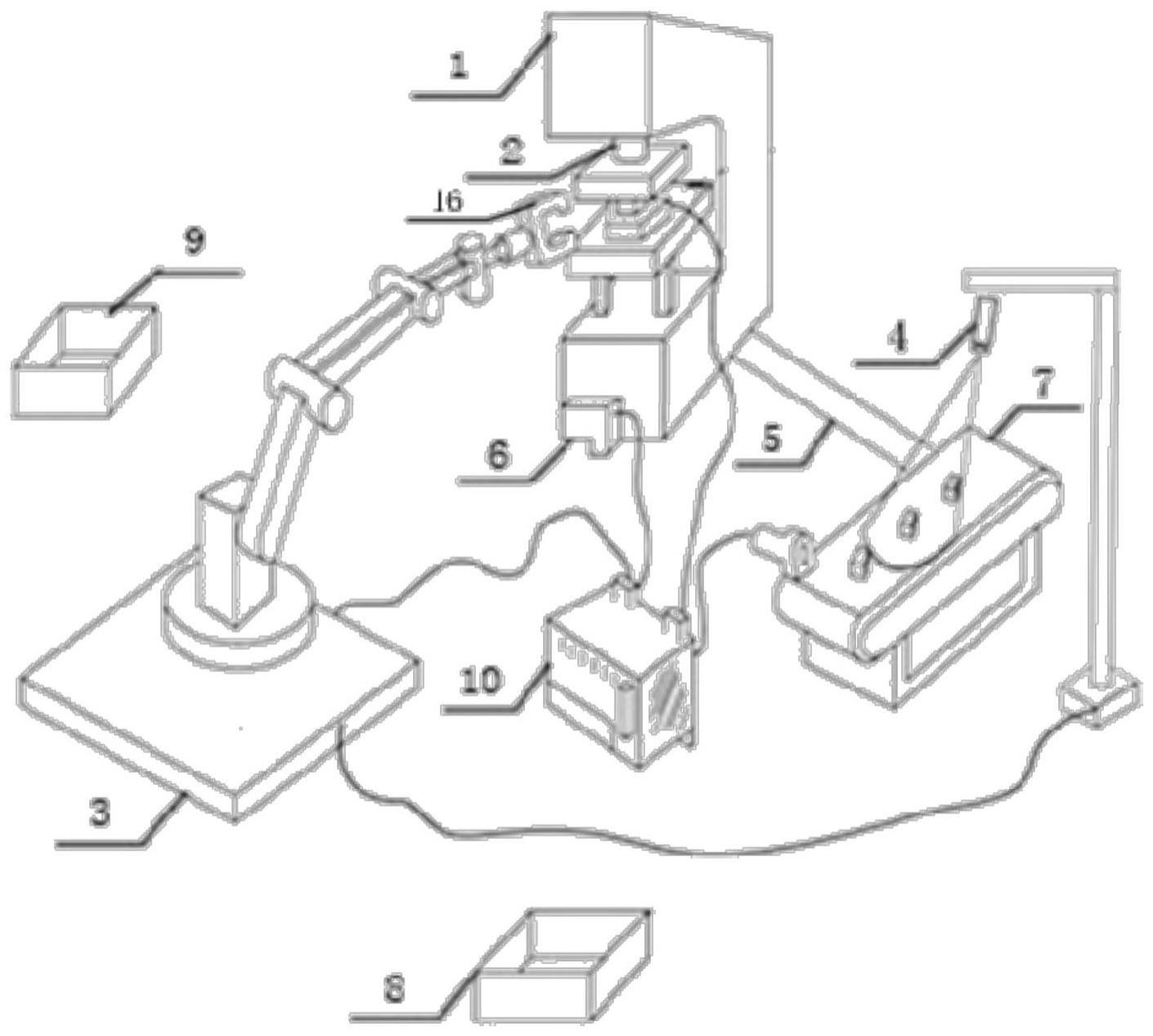
31、一种应用于冲击试样加工中心的上下料系统,包括机器人、冲击加工中心机床、激光位移传感器、运输导板、成品运输皮带、试样盒、控制阀、机器视觉定位装置;
32、机器人末端部设置机器人夹具,机器人夹具用于夹取工件;
33、冲击加工中心机床通过运输导板与成品运输皮带连接,冲击加工中心机床设置有机床夹具;
34、激光位移传感器设置在机床夹具上,用于检测待加工试样的切削长度;
35、控制阀设置在冲击加工中心机床侧面,用于控制机床夹具的松开和闭合;
36、试样盒包括用于放置上道工序来的物料的待加工试样盒和用于放置加工完成后的成品试样的成品试样盒;
37、机器视觉定位装置包括相机和控制单元,相机通过支架设置在成品运输皮带的上方;机器人、相机、激光位移传感器、控制阀通过端口与控制单元连接。
38、机器人夹具包括安装于气缸底板上的三个气缸,气缸底板的另一端用于与机器人末端部连接,每个气缸用于驱动相对应的滑动夹爪动作,每个滑动夹爪和与之相对应的固定夹爪共同作用来夹持工件,每个气缸上设置有压力开关,压力开关用于采集机器人夹具的松开和夹紧状态并传送至控制单元。
39、工件包括待加工试样和成品试样。
40、机器人为六轴工业机器人,相机采用面阵摄像机,控制单元包括plc控制器和触摸屏,plc控制器和触摸屏通过以太网端口连接。
41、与现有技术相比,本发明的有益效果是:
42、1.通过机器视觉定位装置从摄像机获取工件的图像信息,通过控制单元对图像信息进行处理,获取工件的形状、位置和姿态,根据笛卡尔坐标系的相关变化法则对获取的位姿进行坐标变换,获得工件的空间位置,引导机器人完成抓取动作,取代了人工操作,避免了由于人为因素而对生产节拍产生的影响;
43、2.通过机器人软浮动功能,使得机器人呈现出一定的柔软性,会跟随者机床夹具内工件夹紧的方向运动;
44、3.机器人夹具由三个独立的气缸组成,能同时抓取三块试样,提高了定位精度和夹持稳定性;
45、4.采用面阵摄像机获取工件的图像信息,作为工件抓取的定位方式,节省了为满足机器人抓取而必须采用的机械预定位夹具;
46、5.每个工件的姿态和位置都具有随机性,采用机器视觉定位装置,实现引导机器人进行工件的抓取和放置。
- 还没有人留言评论。精彩留言会获得点赞!