用于工具适配器板的快速松脱机构和配置其的机器人的制作方法
在各个实施例中,本发明涉及机器人配置和操作。
背景技术:
1、工业机器人执行涉及物理对象的移动和操纵的各种任务。典型的工业机器人例如可以具有装配有夹持器的一个或多个手臂,其允许机器人拾取特定位置处的对象,将它们运送到目的位置,并根据特定的坐标将它们放下,从而例如将它们堆叠或放置在存在于目的位置处的纸板盒内。
2、机器人可以操纵不同类型的对象,还能执行除了简单地移动对象之外的许多任务—例如,焊接、联接、施加紧固件等。因此,已经开发了许多不同的“终端执行器”用于部署在机器人附肢上。这些终端执行器中的一些(例如夹持器)可用于一系列任务,而另外一些(诸如焊接枪)被设计为执行单一的、专业的任务。为了促成多功能化,商业机器人可以适配不同的终端执行器。例如,不同的终端执行器可以共享共同的联接设计,其允许终端执行器被可更换地安装至机器人手臂的套箍或手腕。使机器人可操作地适配终端执行器是更困难的。经常地,用于机器人的终端执行器的选择在系统集成或组装期间进行,并且基本上是永久的。操作所选择的终端执行器所必需的程序被写成用于机器人的控制器代码。在一些机器人中,终端执行器可以在操作期间被动态地改变,但是典型地,这发生在任务执行的预编程阶段。也就是,当监控下一任务的代码期望更换时,机器人的控制器代码表明需要新的终端执行器。换言之,当机器人执行任务时或当机器人被配备用于新任务时,响应于机器人的预期甚至会发生机器人的终端执行器中的动态变化。
3、因此,需要更通用的方法来热插拔终端执行器以允许操作者进行任意的更换并且由机器人来动态地适配。例如,操作者在操作期间可能发现,相对于夹持器的当前配置所允许的,由机器人所执行的任务出乎意料地需要更精细的控制。在这种情况下,操作者将会想用更合适的终端执行器来替换现有的夹持器,而不重写机器人的任务执行代码。
技术实现思路
1、本发明涉及能够适应终端执行器的动态更换的机器人,以及与终端执行器相关联的软件和硬件,其促成与机器人的通信以在不改变主控制程序的情况下动态地加载和运行允许操作终端执行器的软件。这种执行器专用的程序设计在本文中一般称作“驱动程序”。当检测到相应的终端执行器时,在程序执行期间,驱动程序可被动态地链接和运行。典型地,机器人控制器将存储驱动程序的库,并且当检测到新的终端执行器时,加载适当的驱动程序。该过程在本文中被称作“自配置”。然而,控制器代码本身可以发送通用指令,其不与任何特定的驱动程序相关联,而与被编码进行响应的适当的驱动程序关联。这避免了为了适配不同的终端执行器而在控制器代码级别上做出改变的需要。
2、术语“配置数据”或“配置信息”指标识或有助于实例化(例如,选择和参数化)用于特定终端执行器的适当驱动程序的信息。因而,配置数据可以是实际的驱动程序、用来给特定终端执行器设计通用的驱动程序的参数、或者只是用于所需的驱动程序类型的标识符。术语“标识符”或“标识数据”指标识终端执行器的信息,其可以与用于终端执行器的适当的配置信息组合或用来查找用于终端执行器的适当的配置信息。如下文所解释的,根据设计优先级和偏好,驱动程序、配置数据和标识符可以被不同地分布于系统的构件之间。
3、在各个实施例中,终端执行器并非直接连接至机器人的附肢,而是连接至可拆卸地安装于机器人附肢末端的“工具板”。工具板机械地容置终端执行器并且可以向其供电,并且在某些情况下向其提供数据信号。在终端执行器和工具板之间可以分配各种类型和程度的功能,并且工具板可以适配不止一种类型的终端执行器。这种布置由于最佳地适合于特定机器人的架构而促成了性能的灵活部署,例如,一个构件可能是“非智能的”(例如,不能通信或数据处理)而另外的构件是“智能的”(例如,能够与机器人通信并执行数据处理的操作)。因而,一种实施方式以“非智能的”终端执行器和“智能的”工具板为特征。智能的工具板可以检测多种类型的可连接终端执行器中的哪一种已被附接至该工具板(例如,基于终端执行器的连接器的电气性能或机械配置),并将其报告给加载适当驱动程序的机器人控制器。可选地,智能的工具板可以仅适配单一类型的终端执行器,在这种情况下,它只需要将自身的标识报告给机器人控制器,因为这足以确定适当的驱动程序。
4、另一实施方式以“智能的”终端执行器和“非智能”工具板为特征,在这种情况下,工具板仅促成终端执行器的板上处理器或控制器与机器人控制器之间的通信。终端执行器将它的标识符以有线或无线的方式报告给机器人控制器。在该配置中,工具板例如可以用作机器人附肢与机械上不兼容的终端执行器之间的适配器。如下文所解释的,“报告”可以是主动的(“智能的”构件本身可发起与机器人控制器的通信并发送信息)或被动的(“智能的”构件可以响应于来自于机器人控制器的轮询信号或其他的通信,其中该机器人控制器已检测到附接)。
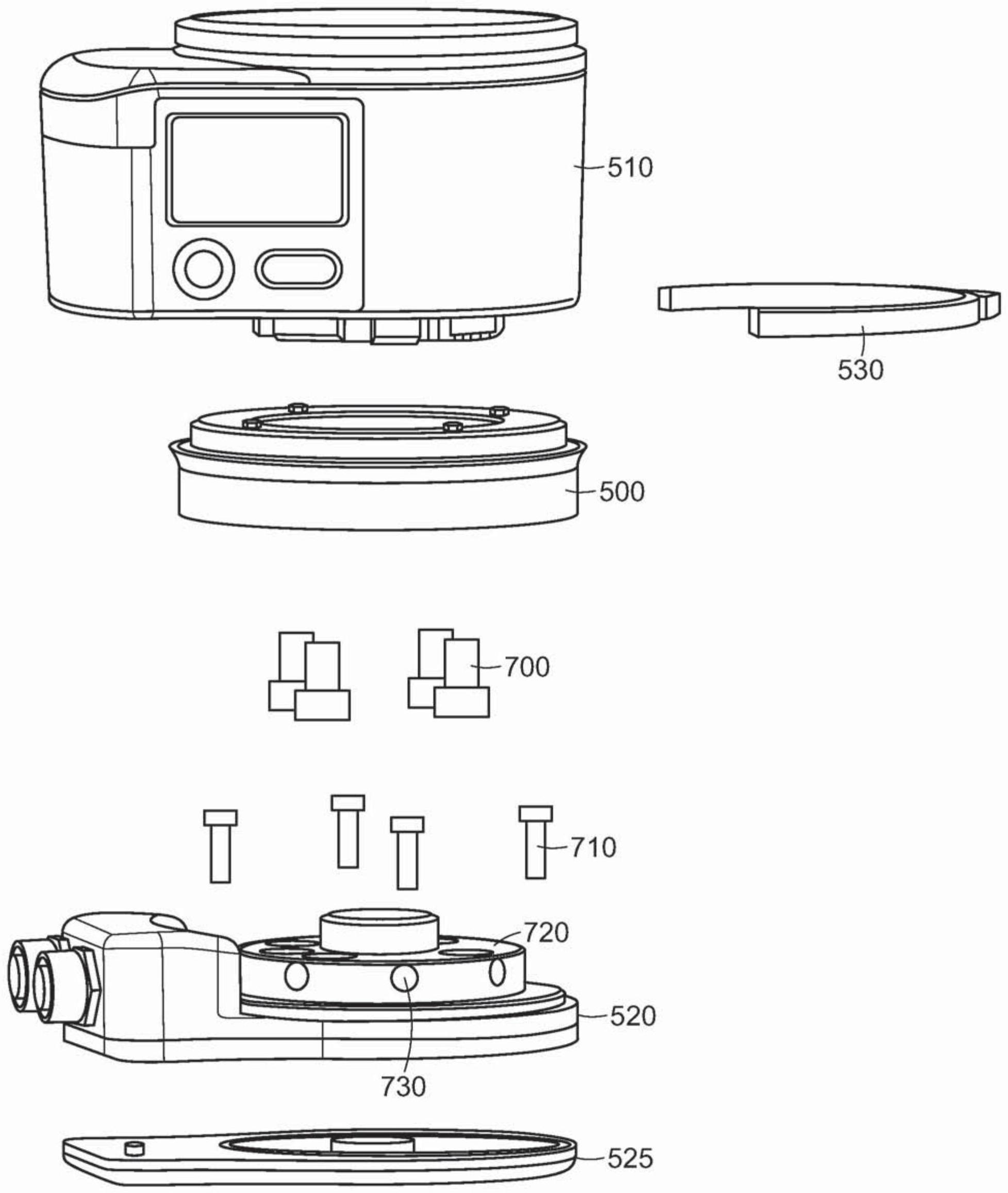
5、本发明的各个实施例的特征在于工具板,该工具板具有“机器人侧”或“机器人部分”以及“工具侧”或“工具部分”,该机器人侧配置有自身固定至机器人附肢的端部或“套箍”的快速松脱机构,工具侧与机器人侧对置,用于容置一种或多种终端执行器。通常情况下,机器人侧(以及由此快速松脱机构)固定安装(例如螺栓连接)至机器人手臂;由此本文提及的“工具板”可统一表示为机器人侧和工具侧或仅为工具侧。工具板的工具侧可固定安装(例如螺栓连接)至一种或多种终端执行器,虽然在工具侧采用的(多个)终端执行器可被互换(例如通过使用构成了部分工具侧的可拆卸的适配器板;该适配器板和/或该终端执行器可被移除和替换)。这种布置不仅使得终端执行器而且使得工具板或其部分通过机械固定但是无需工具、气压或电子致动地被方便地互换或者联接至另一个机器人(通过附接其上的另一个机器人侧部分)。在各个实施例中,快速松脱机构包括根据可轴向滑动的保持环的位置而径向向内或向外移动的系留的球形轴承滚珠,其被容置在工具板的工具侧内的互补凹孔中。滑动环的内表面可是缩窄的,从而滑动环的轴向运动引起了轴承滚珠的径向移动并且将它们固定在凹孔内。为了将工具板的工具侧从机器人侧处释放,将滑动环手动移位以允许轴承滚珠径向朝外移动,由此释放工具板。可采用可移除的固定轴套以防止这种滑动移动,并且由此保持工具板沿轴向且可转动地固定至机器人。
6、一方面,本发明的实施例的特征在于与机器人系统联用的可互换的终端执行器组件,所述机器人系统包括、基本由或由以下内容构成:机器人主体、连接至所述机器人主体且具有包括第一连接器的远端的机器人手臂、用于控制所述机器人手臂以及通过第一连接器连接至所述机器人手臂的终端执行器的机器人控制器。所述终端执行器组件包括、基本由或由以下内容构成:其可拆卸地连接至所述机器人手臂的工具板和用于可拆卸地保持所述工具板紧靠于所述机器人手臂的快速松脱机构。其中所述工具板包括:(1)存储和/或被配置成存储数据的非易失性存储器,该数据包括、基本由或由标识信息和/或配置信息构成,(2)通信接口,(3)处理器;和(4)能够与所述第一连接器配合的第二连接器,用于经由所述通信接口在所述处理器和所述机器人控制器之间建立双向通信。所述处理器被配置为在所述第一连接器和所述第二连接器配合时将数据传输至所述机器人控制器。
7、本发明的实施例可以各种组合中的任何一种包括以下一个或多个。所述工具板可包括、基本由或由突起部分构成,所述突起部分具有围绕其侧壁沿周向布置的一系列凹孔。快速松脱机构包括、基本由或由以下内容构成:用于容置所述工具板的突起部分的凹部、围绕所述凹部并且能够沿着与其同心的轴线滑动的环以及围绕所述滑动环的内表面沿周向布置的多个轴承滚珠。所述环沿第一方向的轴向移动将所述轴承滚珠锁定在所述工具板的所述突起部分的凹孔内,从而保持所述工具板位于所述快速松脱机构内,所述环沿与所述第一方向相反的第二方向的轴向移动将所述轴承滚珠从所述凹孔中释放,从而使所述工具板从所述快速松脱机构脱出。所述滑动环具有缩窄的内表面,其用于在所述环沿第一方向进行轴向移动期间将所述轴承滚珠平移入所述凹孔。终端执行器组件或快速松脱机构可包括弹簧加载的、可回缩的保持环。所述保持环可防止在静止位置的轴承滚珠径向向内移动,当所述保持环响应于所述工具板的所述突起部分的进入而克服弹簧载荷回缩时,允许所述轴承滚珠移入所述凹孔。所述保持环通过压缩波形弹簧被弹簧加载。终端执行器组件或快速松脱机构可包括可拆卸的固定轴套,其被配置为靠近所述滑动环与所述快速松脱机构结合,从而防止了所述滑动环沿所述第二方向的轴向移动。终端执行器可具有第三连接器。工具板包括可拆卸的适配器板,所述适配器板具有与所述第三连接器配合的第四连接器。所述适配器板与所述工具板的第二连接器对向布置。
8、另一方面,本发明的实施例的特征在于一种机器人系统,其包括、基本由或由以下内容构成:机器人主体、连接至所述机器人主体的机器人手臂、机器人控制器、可拆卸地连接至所述机器人手臂的工具板、连接至所述工具板的终端执行器和用于可拆卸地保持所述工具板紧靠于所述机器人手臂的快速松脱机构。所述机器人手臂具有包括第一连接器的远端。所述机器人控制器控制机器人手臂以及通过第一连接器连接至所述机器人手臂的终端执行器。所述工具板包括:(1)存储和/或被配置成存储数据的非易失性存储器,该数据包括、基本由或由标识信息和/或配置信息中构成,(2)通信接口,(3)处理器,和(4)能够与所述第一连接器配合的第二连接器,用于经由所述通信接口建立所述处理器和所述机器人控制器之间的双向通信,所述处理器被配置为在所述第一连接器和所述第二连接器配合时将数据传输至所述机器人控制器。
9、本发明的实施例可以各种组合中的任何一种包括以下一个或多个。所述机器人控制器可适用于基于数据进行自配置并且基于所述自配置控制所连接的终端执行器的移动。所述数据包括、基本由或由标识信息和配置信息两者构成。所述数据不包括配置信息。所述机器人系统可包括数据库,所述数据库包括将终端执行器的标识信息与终端执行器的配置信息相关联的记录。所述机器人控制器还适用于采用标识信息来查询数据库以获得对应的配置信息并且基于该配置信息进行自配置。所述数据可包括配置信息。所述配置信息指定用于控制所述终端执行器的驱动程序。所述配置信息可包括、基本由或由驱动程序、用于设计针对于所述终端执行器的通用驱动程序的一个或多个参数和/或指定驱动程序类型的标识符构成。
10、所述工具板可包括、基本由或由突起部分构成,所述突起部分具有围绕其侧壁沿周向布置的一系列凹孔。快速松脱机构可包括、基本由或由以下内容构成:用于容置所述工具板的所述突起部分的凹部,围绕所述凹部并且能够沿着与其同心的轴线滑动的环,以及围绕所述滑动环的内表面沿周向布置的多个轴承滚珠。所述环沿第一方向的轴向移动将所述轴承滚珠锁定在所述工具板的所述突起部分的凹孔内,从而保持所述工具板位于所述快速松脱机构内,所述环沿与所述第一方向相反的第二方向的轴向移动使所述轴承滚珠从所述凹孔中脱出,从而使所述工具板从所述快速松脱机构脱出。所述滑动环具有缩窄的内表面,其用于在所述环沿第一方向轴向移动期间将所述轴承滚珠平移入所述凹孔内。终端执行器组件或快速松脱机构可包括弹簧加载的、可回缩的保持环。该保持环可用于防止在静止位置的轴承滚珠径向向内移动,当所述保持环响应于所述工具板的所述突起部分的进入而克服弹簧载荷回缩时,可允许所述轴承滚珠移入所述凹孔内。所述保持环通过压缩波形弹簧被弹簧加载。终端执行器组件或快速松脱机构可包括可拆卸的固定轴套,其被配置为靠近所述滑动环与所述快速松脱机构接合,由此防止了所述滑动环沿所述第二方向的轴向移动。终端执行器可具有第三连接器。所述工具板包括可拆卸的适配器板,所述适配器板具有与所述第三连接器配合的第四连接器。所述适配器板与所述工具板的第二连接器相对布置。
11、另一方面,本发明的实施例的特征在于一种机器人系统,其包括、基本由或由以下内容构成:机器人主体、连接至所述机器人主体的机器人手臂、机器人控制器、通过与所述机器人器连接器配合的第一工具板连接器而可拆卸地连接至所述机器人手臂的工具板、用于可拆卸地保持所述工具板紧靠于所述机器人手臂的快速松脱机构、以及可拆卸地连接至所述机器人手臂的终端执行器。所述机器人手臂具有包括机器人连接器的远端。所述机器人控制器控制机器人手臂以及连接至该机器人手臂的终端执行器。工具板包括与第一工具板连接器对置的第二工具板连接器。所述终端执行器包括:(1)存储和/或被配置成存储数据的非易失性存储器,该数据包括、基本由或由标识信息和/或配置信息构成,(2)通信接口,(3)处理器,和(4)能够与所述第二工具板连接器配合的终端执行器连接器,用于经由所述通信接口在所述处理器和所述机器人控制器之间建立双向通信。所述处理器被配置为在所述终端执行器和所述工具板与所述机器人手臂配合时将数据传输至所述机器人控制器。
12、本发明的实施例可以各种组合中的任何一种包括以下一个或多个。所述数据不包括配置信息。所述工具板包括存储配置信息的非易失性存储器和用于基于所述数据查找响应所述终端执行器的配置信息的电路。所述机器人控制器适用于基于数据进行自配置并且基于所述自配置控制所连接的终端执行器的移动。所述数据包括、基本由或由标识信息和配置信息两者构成。所述机器人系统可包括数据库,所述数据库包括将终端执行器的标识信息与终端执行器的配置信息相关联的记录。所述机器人控制器还适用于使用标识信息来查询数据库以获得相应的配置信息并且基于该配置信息进行自配置。所述数据包括配置信息。所述配置信息指定用于控制所述终端执行器的驱动程序。所述配置信息可包括、基本由或由以下内容构成:驱动程序、用于设计针对于所述终端执行器的通用驱动程序的一个或多个参数和/或指定所述驱动程序类型的标识符。
13、所述工具板可包括、基本由或由突起部分构成,所述突起部分具有围绕其侧壁沿周向布置的一系列凹孔。快速松脱机构可包括、基本由或由以下内容构成:用于容置所述工具板的所述突起部分的凹部,围绕所述凹部并且能够沿着与其同心的轴线滑动的环,以及围绕所述滑动环的内表面沿周向布置的多个轴承滚珠。所述环沿第一方向的轴向移动将所述轴承滚珠锁定在所述工具板的所述突起部分的凹孔内,从而保持所述工具板位于所述快速松脱机构内,所述环沿与所述第一方向相反的第二方向的轴向移动使所述轴承滚珠从所述凹孔中脱出,从而使所述工具板从所述快速松脱机构中脱出。所述滑动环具有缩窄的内表面,其用于在所述环沿第一方向轴向移动期间将所述轴承滚珠平移入所述凹孔内。终端执行器组件或快速松脱机构可包括弹簧加载的、可回缩的保持环。该保持环可防止在静止位置的轴承滚珠径向向内移动,当所述保持环响应于所述工具板的所述突起部分的进入而抵抗弹簧载荷回缩时,可允许所述轴承滚珠移入所述凹孔内。所述保持环通过压缩波形弹簧被弹簧加载。终端执行器组件或快速松脱机构可包括可拆卸的固定轴套,其被配置为靠近所述滑动环与所述快速松脱机构接合,由此防止所述滑动环沿所述第二方向的轴向移动。所述工具板包括可拆卸的适配器板,所述第二工具板连接器被布置在所述适配器板上。
14、另一方面,本发明的实施例的特征在于一种快速松脱机构,其包括用于容置将被锁定其上的物体的凹部。所述快速松脱机构包括、基本由或由包围所述凹部并且能够沿着与其同心的轴线滑动的环、以及围绕所述滑动环的内表面沿周向布置的多个轴承滚珠构成。所述环的沿第一方向的轴向移动将所述轴承滚珠锁定在所述物体内的互补凹孔中,从而使物体保持位于所述快速松脱机构内。所述环的沿与第一方向相反的第二方向的轴向移动使所述轴承滚珠从所述凹孔处脱出,从而使所述物体从所述快速松脱机构处脱出。
15、本发明的实施例可以各种组合中的任何一种包括以下一个或多个。所述滑动环具有缩窄的内表面,其用于在所述环沿第一方向轴向移动的过程中将所述轴承滚珠平移入所述凹孔。快速松脱机构可包括弹簧加载的、可回缩的保持环。该保持环可防止轴承滚珠在静止位置处径向向内移动。当所述保持环响应于物体的进入而抵抗弹簧载荷回缩时,可允许所述轴承滚珠移入所述凹孔。所述保持环通过压缩波形弹簧被弹簧加载。快速松脱机构可包括可拆卸的固定轴套,其被配置为靠近所述滑动环与所述快速松脱机构接合,由此防止了所述滑动环沿所述第二方向轴向移动。
16、在又一个方面中,本发明的实施例的特征为与机器人系统联用的可互换的工具板,所述机器人系统包括、基本由或由以下内容构成:机器人主体、连接至所述机器人主体且具有包括机器人连接器的远端的机器人手臂、用于控制所述机器人手臂的机器人控制器以及连接至所述机器人手臂的远端的快速松脱机构。所述工具板包括、基本由或由以下内容构成:与所述快速松脱机构的内凹部分配合的突起部分,以及被配置为当所述突起部分被容置在所述快速松脱机构内时接合于互补电连接器的电连接器。所述突起部分包括围绕其侧壁沿周向布置的多个凹孔。所述凹孔的尺寸和形状被设计为可锁定地容置所述快速松脱机构的轴承滚珠以将所述工具板可拆卸地保持在所述快速松脱机构内。
17、本发明的实施例可以各种组合中的任何一种包括以下一个或多个。所述工具板可包括用于容置终端执行器的、与所述突起部分对置的工具板连接器。所述工具板可包括可拆卸的适配器板,所述工具板连接器被布置在所述适配器板上。所述工具板可包括存储和/或配置为存储数据的非易失性存储器。所述机器人控制器适用于基于数据进行自配置并且基于所述自配置控制连接至所述工具板的终端执行器的移动。所述数据包括、基本由或由标识信息和/或配置信息构成。所述数据包括、基本由或由标识信息和配置信息构成。所述数据不包括配置信息。所述机器人系统可包括数据库,所述数据库包括将终端执行器的标识信息与终端执行器的配置信息相关联的记录。所述机器人控制器可适用于使用标识信息来查询数据库以获得相应的配置信息并且基于该配置信息进行自配置。所述数据可包括、基本由或由配置信息构成。所述配置信息指定用于控制与所述工具板配合的终端执行器的驱动程序。所述配置信息可包括、基本由或由驱动程序,设计针对于所述终端执行器的通用驱动程序的一个或多个参数,和/或指定驱动程序类型的标识符构成。工具板可包括处理器和通信接口,所述通信接口用于在所述机器人控制器和所述处理器之间进行双向通信。所述处理器可被配置为在所述电连接器与所述互补电连接器配合时将数据传输至所述机器人控制器。所述工具板可包括可拆卸固定轴套,其用于将所述工具板锁定至所述快速松脱机构。所述固定轴套呈圆形或半圆形。
18、这些和其他目的以及在本文中公开的本发明的优势和特征将通过参照下文说明、附图和权利要求书而变得更加清晰。另外,应理解的是,本文描述的各个实施例的特征并不互斥,而是可以各种组合和置换存在。如本文所用,术语“接近”、“约”和“基本上”表示±10%,在一些实施例中为±5%。该术语“基本由……构成”表示排除其他有助于功能的材料,除非在本文中另有限定。尽管如此,这样的其他材料可整体地或单独地微量存在。
- 还没有人留言评论。精彩留言会获得点赞!