一种用于拱锚一体台车的组合臂架系统及工作方法与流程
本发明涉及用于拱锚一体台车,特别是指一种用于拱锚一体台车的组合臂架系统及工作方法。
背景技术:
1、在隧道施工中,初支环节包括立拱、挂网、锁脚锚杆钻设、系统锚杆钻设工序,而现有的多功能臂架系统,对台阶法施工适应性未做详细说明。在实际三台阶法施工中,由于臂架无法伸到上台阶,均采用人工立拱。并且上台阶空间小,锁脚锚杆和系统锚杆作业均靠人工完成,耗时费力,并存在安全隐患。
2、在立拱时,现有臂架系统的机械抓手不能适应多榀拱架作业,即无法同时立两榀或三榀拱架。现有技术的组合臂架:申请号202110243212.2的中国专利一种隧道施工组合臂架、申请号为202122542787.2的中国专利一种拱锚臂及拱锚台车》能实现立拱和锁脚锚杆功能,但对于覆盖范围、三台阶法施工适应性未做出针对性说明,针对复杂的地下隧道空间存在适用范围小的问题,且工作效率有待进一步提升。
技术实现思路
1、针对上述背景技术中的不足,本发明提出一种用于拱锚一体台车的组合臂架系统及工作方法,解决了现有技术中组合臂架存在适用范围小的问题。
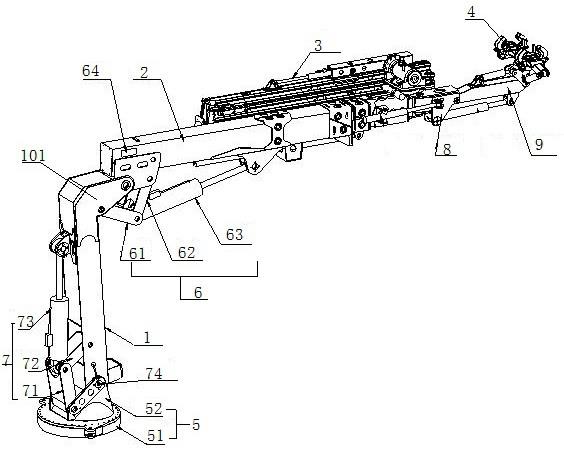
2、本发明的技术方案是这样实现的:一种用于拱锚一体台车的组合臂架系统,包括连接在台车上的折叠臂,折叠臂的一端通过回转机构连接在台车上、另一端通过折叠机构连接有伸缩臂,伸缩臂上设有双推梁钻臂和翻转式抓手;所述回转机构包括回转支撑和回转底座,回转支撑的内圈固定在台车上,回转底座固定在回转支撑的外圈上,且回转支撑的外圈在回转驱动件的作用下能带动回转底座相对台车转动;所述折叠臂铰接在回转底座上且通过连杆驱动机构与回转底座相连接。
3、进一步,所述双推梁钻臂包括双回转机构和双推滑动机构,双推滑动机构设置在双回转机构上,且双推滑动机构上设有凿岩机和对应的钻杆。
4、作为优选,所述双回转机构包括能在水平面内转动的回转驱动ⅰ和能在竖直面内转动的回转驱动ⅱ,回转驱动ⅱ设置在回转驱动ⅰ上,回转驱动ⅱ上设有梁底座,双推滑动机构设置在梁底座上。
5、作为优选,所述双推滑动机构包括平行设置的下推进梁和上推进梁,下推进梁通过摩擦座滑动连接在梁底座上,且下推进梁与梁底座之间设有驱动下推进梁相对梁底座运动的补偿油缸;上推进梁通过摩擦板滑动连接在下推进梁上,且上推进梁与下推进梁之间设有驱动上推进梁相对应下推进梁运动的伸缩油缸;上推进梁上设有推动凿岩机相对应上推进梁运动的推进油缸。
6、进一步,所述连杆驱动机构包括设置在回转底座上的第一连杆,第一连杆的一端铰接在回转底座上、另一端铰接有第二连杆和第一油缸,第二连杆的另一端铰接在折叠臂的中部,第一油缸的另一端铰接在折叠臂的上部;第一连杆、第二连杆、回转底座及折叠臂的中下部组成平行四边形连杆机构。作为优选,所述折叠臂与回转底座的铰接轴上连接有旋转编码器。
7、其中,所述折叠臂为“7”字型结构,所述折叠机构包括铰接在折叠臂顶部横梁上的第三连杆和铰接在伸缩臂上的第四连杆,第三连杆和第四连杆通过铰接轴a铰接成角型架,铰接轴a上还铰接有第二油缸,第二油缸的伸缩端铰接在伸缩臂上且靠近双推梁钻臂;所述伸缩臂上且靠近折叠臂的一端设有倾角仪。
8、进一步,所述伸缩臂的伸缩端部设有摆动机构,摆动机构上设有俯仰机构,俯仰机构上设有翻转式抓手;所述摆动机构包括铰接在伸缩臂伸缩端部的第一连接座,伸缩臂与第一连接座之间连接有第一摆动油缸,在第一摆动油缸的作用下,第一连接座能绕铰接轴ⅰ做水平面内的左右摆动;所述俯仰机构包括铰接在第一连接座上的抓手臂,抓手臂与第一连接座之间设有第一俯仰油缸,在第一俯仰油缸的作用下,抓手臂能绕铰接轴ⅱ做竖直面内的俯仰动作,翻转式抓手设置在抓手臂上。
9、进一步,所述翻转式抓手包括铰接在抓手臂端部的第二连接座,第二连接座与抓手臂之间设有第二俯仰油缸,在第二俯仰油缸作用下,第二连接座能绕铰接轴ⅲ做竖直面内的俯仰动作;第二连接座上铰接有抓手板座,抓手板座的一端通过翻转油缸与第二连接座相连接;所述抓手板座上设有抓手组件,且抓手板座上可拆卸设有稳定架,稳定架与抓手组件相对应设置;所述抓手组件包括两个对称设置的抓手,抓手的抓取部设有垫块,抓手的中部铰接在抓手板座上,抓手的下部通过夹紧油缸相连接,夹紧油缸位于抓手板座的下部。
10、进一步,所述的用于拱锚一体台车的组合臂架系统的工作方法,步骤如下:
11、s1:抓拱:将台车移动至距掌子面一定距离,利用折叠臂、伸缩臂和翻转式抓手的配合,对拱架进行正向抓拱或侧向抓拱,以进行全断面法施工或台阶法施工;
12、s2:立拱:在全断面法施工中,立拱时,折叠臂架举升,调节伸缩臂俯仰角度,并使翻转式抓手的抓手保持水平朝上姿态,将拱架准确定位到隧道内壁特定安装位点;在台阶法施工中,立拱时,折叠臂俯仰配合伸缩臂俯仰,翻转式抓手的抓手保持水平朝上姿态,避开上台阶,并将台阶上的拱架送到隧道顶部特定安装位点;
13、s3:锚固:大隧道全断面和台阶法施工中,由于作业空间大,系统锚杆和锁脚锚杆的钻设采用双推进系统;在小断面隧道的台阶法施工中,由于作业空间小,上台阶锁脚锚杆的钻设采用单推进系统;然后利用系统锚杆和锁脚锚杆,对拱架进行固定;
14、s4:重复步骤s1~s4,直至完成所有拱架的安装。
15、步骤s1中对拱架进行正向抓拱时,折叠臂上仰至最大角度,此时伸缩臂不与车架干涉的最小角度为b,抓手臂上仰角度为b1,抓手向后摆动角度为b2,为保证能顺利抓拱,此时夹手要能调整到水平角度,需满足b1+b2=b;
16、对拱架进行侧向抓拱时,伸缩臂下俯的最大角度为c,伸缩臂下俯的最小角度为d,抓手臂下俯角度为a1,抓手向前摆动角度为a2,为保证能顺利抓拱,侧向抓拱时覆盖范围为(c~d)+ a1+ a2>90°。
17、步骤s2中立拱时,折叠臂完全缩回,伸缩臂完全伸出并向上俯仰至角度a时,此处为抓手工作范围第一极限位置;然后折叠臂上仰至最大角度,伸缩臂完全伸出并上仰至最大角度e,此处为抓手工作范围第二极限位置;由于a>e,角度a为极限角度,抓手臂下俯角度为a1,抓手向前摆动角度为a2,为保证夹手水平向上,需满足a1+a2=a。
18、本发明的有益效果为:1、本发明利用旋转式折叠臂与伸缩臂配合,多四边形连杆结构设计,增加臂架的覆盖范围;折叠臂能在回转机构的作用下,在台车上进行平面内的转动,伸缩臂能在折叠机构的作用下进行一键收缩和展开,提高其作业覆盖范围,提高其适用性,满足三台阶法施工隧道及全断面施工隧道的立拱需求。2、双推梁钻臂和翻转式抓手形成的集成式组合钻臂可实现隧道施工初支环节立拱、挂网、锁脚锚杆、系统锚杆的多功能作业,并能同时进行多榀拱架的抓取和安装,降低移车频率,减少作业人员数量,提高初支施工效率。3、双推进梁钻臂搭载于臂架,利用其自由度多的特点,不仅适用于大隧道全断面施工,也适用于台阶法施工中,实现高精度立拱和凿岩定位,简单易操作;单线隧道或三台阶法施工适应性强,替代人工作业,降低安全风险。
- 还没有人留言评论。精彩留言会获得点赞!