一种六自由度冲压机器人及其冲压方法与流程
本发明属于机器人,具体涉及一种六自由度冲压机器人及其冲压方法。
背景技术:
1、随着我国智能系统的不断进步和发展,在工业制造中已经逐渐采用机械手臂来满足工作环境多变的作业需求,具有智能感应下的多自由度机械臂的多自由度机器人将成为未来工业生产的重要劳动力。智能感应和多自由度机械臂系统的设计与实现,已成为我国工业制造业在世界生产制造业中取得核心竞争力的重要保障。冲压机器人可以实现冲压加工过程中的自动化送料、下料,再通过与冲压床进行配合,对冲压机器人送料至待冲压区域的待冲压件进行冲压加工,冲压机器人在生产过程中的自动化控制是实现自动下料上料的零部件生产工艺核心。因此在系统控制方案设计与实施时,要从现阶段生产线协调性出发,通过实现控制冲压机器人与冲压床功能之间的灵活协调性,以此来加大冲压机器人的自动化稳定控制,提升系统生产效率和大批量生产安全性。
2、现有技术中,如专利号为cn105665579b的中国专利公开了一种冲压控制系统及冲压方法,控制系统包括机械手和冲床,所述机械手末端用于夹取物料,所述冲床设有上模面和下模面,还包括用于控制所述机械手和冲床运行的控制系统,且所述控制系统,在所述机械手处于所述上模面和下模面之间时,控制所述机械手末端的上端面与所述上模面之间的实际距离大于或等于安全距离,所述安全距离介于所述上模面与下模面之间距离的1/3至1/5;所述控制系统,在所述机械手将物料放置于所述下模面的模腔上后并在冲床执行冲压操作前,控制所述冲床向所述下模面移动,并调整所述上模面的高度,使得所述机械手末端的上端面与所述上模面之间的实际距离等于所述安全距离。
3、但是其仅仅是公开了具体的控制系统的机械结构以及控制系统控制机械结构的具体参数,却没有对如何利用各个参数对控制系统精确控制冲压床与冲压机器人在工作时间上的协调以及如何确定其已经准确地达到了距离冲压床的上模面的安全距离处。
技术实现思路
1、本发明针对上述缺陷,提供一种六自由度冲压机器人及其冲压方法。本发明能够先控制第一电机至第三电机进而控制基座、第一机械臂和第二机械臂进行将待冲压件靠近冲压床的运动轨迹优化,再通过能够准确判定振幅和相位达到稳定的超声波测距模块确定待冲压件分别到达冲压床上模面和下模面的期望安全点后,再进一步优化控制第四电机至第六电机控制第三机械臂和末端执行器进行姿态调整运动,并再次通过超声波测距模块确定末端执行器拿取的待冲压件已经放置在下模面的最优点等待冲压床的上模面对其冲压;本发明的六自由度机器人的冲压方法能够有效确定待冲压件是否到达准确位置而避免误操作,也可以避免超声波测距信号确定的不准确所导致的延时所带来的误操作,进一步提高了六自由度冲压机器人在人工智能化过程中的安全性。
2、本发明提供如下技术方案:一种六自由度冲压机器人的冲压方法,所述冲压方法用于冲压坯料得到机械零部件,包括以下步骤:
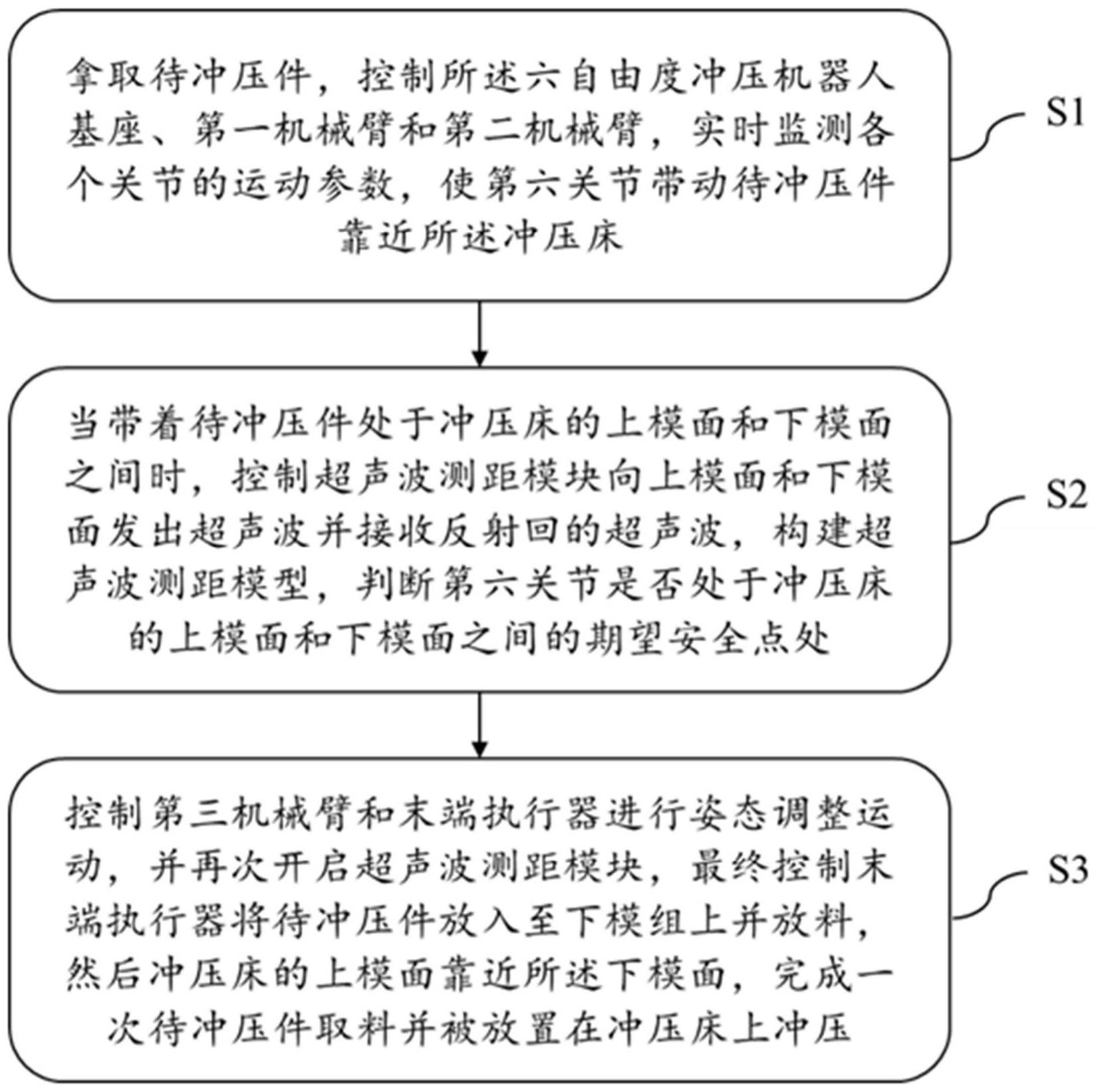
3、s1:所述六自由度冲压机器人拿取待冲压件,然后控制所述六自由度冲压机器人的腰部、第一机械臂和第二机械臂进行运动,实时监测所述六自由度冲压机器人的各个关节的运动参数,使所述六自由度冲压机器人的第六关节带动待冲压件靠近所述冲压床;
4、s2:当所述第六关节带着待冲压件处于冲压床的上模面和下模面之间时,控制设置在所述第六关节上端面的超声波测距模块向冲压床的上模面和下模面发出超声波并接收反射回的超声波,构建超声波测距模型,判断所述第六关节是否处于所述冲压床的上模面和下模面之间的期望安全点处;
5、s3:当所述第六关节处于所述期望安全点处后,控制所述六自由度冲压机器人的第三机械臂和末端执行器进行姿态调整运动,并再次开启超声波测距模块,最终控制末端执行器将待冲压件放入至下模组上并放料,然后冲压床的上模面靠近所述下模面,完成一次待冲压件被所述六自由度冲压机器人取料并放置在冲压床上等待被冲压的过程。
6、作为本发明的进一步优选限定,所述s1步骤包括以下步骤:
7、s11:在所述s1步骤中的实时监测所述六自由度冲压机器人的各个关节的运动参数过程中,实时监测所述冲压机器人的基座与腰部连接的第一关节、腰部与第一机械臂连接的第二关节、第一机械臂与第二机械臂连接的第三关节、第二机械臂与第三机械臂连接的第四关节、第三机械臂与末端执行器连接的第五关节以及末端执行器与待冲压件连接的第六关节的实时运动参数,构建所述六自由度冲压机器人的齐次坐标矩阵:
8、q=[q1q2q3q4q5q6]t,
9、其中,qi表示第i个关节的实时笛卡尔角位移矢量,i=1,2,3,4,5,6;
10、s12:计算各个关节的位姿变换矩阵:
11、
12、其中,ai为第i个关节的位姿变换矩阵,为绕zi轴旋转qi角度的第一旋转矩阵,为沿zi轴平移di距离的第一位移变换矩阵,为沿xi轴平移ai距离的第二位移变换矩阵,为绕xi-1轴旋转αi角度的第二旋转矩阵;qi为第i个关节的实时笛卡尔角位移矢量,即从xi-1轴到xi轴关于zi轴的转角;di为第i关节所对应的自身连杆的偏置距离,即从xi-1轴到xi轴沿zi轴的距离;αi为第i关节所对应的自身连杆的扭角,即从zi-1轴到zi轴关于xi-1轴的转角;ai为第i关节所对应的自身连杆的长度,即从zi轴到zi+1轴沿xi+1轴的距离;
13、s13:根据所述s12步骤计算的各个关节的位姿变换矩阵,计算第六关节在所述六自由度冲压机器人所处的基础坐标系下的空间位置矩阵p0((6,y6,z6):
14、
15、其中,为第六关节相对于基座所在基础坐标系内的位置((0,y0,z0)的空间位置转换矩阵,(6,y6,z6分别为第六关节在基础坐标系内的横坐标、纵坐标和竖坐标;i5×5为一个5×5的单位矩阵,05×1为一个5×1的零矩阵;
16、s14:构建所述六自由度冲压机器人的第一关节至第六关节的运动模型:
17、
18、其中,μ为所述六自由度冲压机器人的惯性参数,为第i个关节的实时笛卡尔角速度矢量,为第i个关节的实时笛卡尔角加速度矢量;τi为第i个关节受到的所述六自由度冲压机器人所有输入的力所导致的力矩矢量,并定义τ=[τ1τ2τ3τ4τ5τ6]t为所述六自由度冲压机器人的内部力矩矢量矩阵;m(q1,q2,q3,q4,q5,q6,μ)为带有惯性参数μ的所述六自由度冲压机器人的正定对称惯性矩阵,为带有惯性参数μ的所述六自由度冲压机器人的离心力和哥式力项矩阵,g(q1,q2,q3,q4,q5,q6,μ)为带有惯性参数μ的所述六自由度冲压机器人的重力项矩阵;
19、s15:采用有限傅里叶变换表示第一关节至第六关节的实时笛卡尔角位移矢量qi(t)、实时笛卡尔角速度矢量和实时笛卡尔角加速度矢量采用最小二乘法优化所述六自由度冲压机器人的第一关节至第六关节的运动模型,进而优化所述六自由度冲压机器人的第一关节至第六关节靠近所述冲压床的运动轨迹,使所述六自由度冲压机器人以最小的误差按照期望的运动轨迹靠近所述冲压床。
20、作为本发明的进一步优选限定,所述六自由度冲压机器人的内部力矩矢量矩阵的计算公式如下:
21、τ=φ-1·q,
22、其中,q为所述六自由度冲压机器人内部构件参数矩阵;φ-1为所述六自由度冲压机器人笛卡尔矢量矩阵φ的逆矩阵;
23、所述六自由度冲压机器人内部构件参数矩阵q如下:
24、,
25、其中,m1为腰部的质量,m2为第一机械臂的质量,m3为第二机械臂的质量,m4为第三机械臂的质量,m5为末端执行器的质量,m6为被拿取的待冲压件的质量;lc1为腰部的质心至第一关节所在基础坐标系内的坐标((1,y1,z1)的距离,lc2为第一机械臂的质心至第二关节(所在基础坐标系内的坐标((2,y2,z2)的距离,lc3为第二机械臂的质心至第三关节所在基础坐标系内的坐标(x3,y3,z3)的距离,lc4为第三机械臂的质心至第四关节所在基础坐标系内的坐标(x4,y4,z4)的距离,l5为末端执行器的质心至第五关节所在基础坐标系内的坐标(x5,y5,z5)的距离,lc6为被拿取的待冲压件的质心至第六关节所在基础坐标系内的坐标((6,y6,z6)的距离;为第一关节沿其自身笛卡尔坐标系竖向z1轴所受到的惯性矩;为第二关节沿其自身笛卡尔坐标系竖向z2轴所受到的惯性矩;为第三关节沿其自身笛卡尔坐标系竖向z3轴所受到的惯性矩;第四关节沿其自身笛卡尔坐标系竖向z4轴所受到的惯性矩;第五关节沿其自身笛卡尔坐标系竖向z5轴所受到的惯性矩,第六关节沿其自身笛卡尔坐标系竖向z6轴所受到的惯性矩;
26、所述六自由度冲压机器人笛卡尔矢量矩阵φ如下:
27、
28、作为本发明的进一步优选限定,所述s15步骤中,采用有限傅里叶变换表示的所述六自由度冲压机器人的第一关节至第六关节的实时笛卡尔角位移矢量qi(t)、实时笛卡尔角速度矢量和实时笛卡尔角加速度矢量分别如下:
29、
30、
31、
32、其中,ωf为傅里叶级数的基本频率,进而各个关节产生的周期性响应的一个周期tf为tf=2π/ωf,εi,k为第i个关节的角位移矢量傅里叶变换正弦系数,σi,k为第i个关节的角位移矢量傅里叶变换余弦系数,k为有限傅里叶变换过程中的第k个周期,k=1,2,…,n。
33、作为本发明的进一步优选限定,所述s15步骤中采用最小二乘法优化所述六自由度冲压机器人的第一关节至第六关节的运动模型,进而优化所述六自由度冲压机器人的第一关节至第六关节靠近所述冲压床的运动轨迹包括以下步骤:
34、s151:构建所述第一关节至第六关节的实时最优轨迹模型:
35、
36、s.t-170°≤q1≤170°;
37、-150°≤q2≤45°;
38、-45°≤q3≤150°;
39、其中,r为最优轨迹距离计算值,xd1、yd1和zd1分别为按照最优轨迹模型时末端执行器所到达的基础坐标系内的处于冲压床上模面和下模面之间的期望横坐标、期望纵坐标和期望竖坐标;xi为第i个关节在基础坐标系的实时横坐标,yi第i个关节在基础坐标系的实时纵坐标,zi第i个关节在基础坐标系的实时纵坐标;
40、s152:构建第一关节至第六关节的实时最优位置最小二乘拟合方程v(c):
41、
42、其中,c为第一关节至第六关节的实时最优笛卡尔角位移矢量解集合,其为一组第一关节至第六关节的实时笛卡尔角位移矢量最优集合:rg为最小二乘法优化过程中得到的第g组数据,g∈{1,2,…,e}。
43、作为本发明的进一步优选限定,所述s2步骤中,包括以下步骤:
44、s21:构建从t1时刻至tw时刻中的tw时刻的接收到的超声波信号计算模型:
45、
46、其中,t1为超声波发射开始时间点,tw为接收到反射回的时间点;s(tw)为在tw时刻接收到的超声波信号,w∈{1,2,…,w},a(tw)为在tw时刻的接收到的超声波信号的振幅,η(tw)为在tw时刻的接收到的超声波信号的频率,为在tw时刻的接收到的超声波信号的相位;
47、s22:采用tw-1时刻接收到的超声波信号的相位估计值和振幅估计值估计tw时刻接收到的超声波信号:
48、
49、其中,为tw时刻接收到的超声波信号的估计值;
50、s23:计算tw时刻接收到的超声波信号估计值与真实值s(tw)之间的误差es(tw):
51、
52、s24:采用所述s23步骤的计算结果计算估计值和真实值之间的梯度向量:
53、
54、其中,为tw时刻接收到的超声波信号的振幅估计值和相位估计值组成的参数矩阵,
55、s25:根据所述s24步骤得到的梯度向量,进一步计算tw时刻接收到的超声波信号估计值与真实值之间的误差es(tw)的海瑟矩阵hs(tw);
56、s26:判断所述海瑟矩阵是否为正定矩阵,若是,则表明tw时刻接收到的超声波信号的振幅和相位的变化值最小,即tw时刻末端执行器已经到达位于冲压床上模组和下模组之间的期望安全点处,作为停止所述s2步骤的最优时刻点tw,best1;否则重复所述步骤s21-s25。
57、作为本发明的进一步优选限定,所述s26步骤中tw时刻接收到的超声波信号估计值与真实值之间的误差es(tw)的海瑟矩阵hs(tw)如下:
58、
59、作为本发明的进一步优选限定,所述s3步骤,包括以下步骤:
60、s31:构建末端执行器所在水平面距离冲压床上模面在基础坐标系中的竖直方向的距离t1计算模型:
61、
62、其中,β为所述超声波测距模块与冲压床上模面端侧在冲压床所在竖直方向上的夹角;t1为第六关节在冲压床上模面和下模面之间的期望安全点((d1,yd1,zd1)处在基础坐标系内竖直方向上距离冲压床上模面距离;s为超声波传播速度,s=340m/s;
63、s32:进一步计算末端执行器距离冲压床下模面在基础坐标系中的竖直方向的距离t2:
64、t2=t-t1,
65、其中,t为冲压床在基础坐标系内竖直方向上上模面和下模面之间的距离;
66、s33:构建第四关节至第六关节的姿态调整最优模型:
67、
68、
69、jmin≤t2≤jmax;
70、-185°≤q4≤185°;
71、-150°≤q5≤150°;
72、-350°≤q6≤350°;
73、其中,jmax=1/3t,jmin=1/4t;ltw,best2为第六关节将其拿取的待冲压件放置在冲压床下模面的最优点((d2,yd2,zd2)过程中超声波模块发射超声波过程中的能耗,tw,best2为第六关节将其拿取的待冲压件放置在冲压床下模面的最优点((d2,yd2,zd2)的时刻;η(tw,best1)为在tw,best1时刻的接收到的超声波信号的频率;
74、s34:根据所述s33步骤构建的姿态调整最优模型,得到在此过程中第四关节实时运动的最优笛卡尔运动矢量q4,best2、第五关节实时运动的最优笛卡尔运动矢量q5,best2和第六关节实时运动的最优笛卡尔运动矢量q6,best2。
75、本发明还提供一种六自由度冲压机器人,包括基座,所述六自由度冲压机器人采用如上任一所述方法,所述六自由度冲压机器人还包括腰部、连接所述基座与所述腰部的第一关节、第一机械臂、连接所述腰部与第一机械臂的第二关节、第二机械臂、连接所述第二机械臂与第一机械臂的第三关节、第三机械臂、连接所述第三机械臂与第二机械臂的第四关节、末端执行器,连接末端执行器与第三机械臂的第五关节以及连接末端执行器(6)与待冲压件的第六关节;
76、所述第六关节的上端面上还设置有超声波测距模块;所述六自由度冲压机器人还包括控制其运行的中央控制单片机,所述中央控制单片机执行如权利要求上任一所述方法的s1-s3步骤;
77、所述超声波测距模块包括超声波发射模块以及超声波接收模块,所述超声波发射模块7用于向所述冲压床的上模面和下模面发射超声波,所述超声波接收模块用于接收反射回的超声波信号;
78、作为本发明的进一步优选限定,所述六自由度冲压机器人还包括驱动腰部相对于基座运动的第一电机、驱动第一机械臂相对于腰部运动的第二电机、驱动第二机械臂相对于第一机械臂运动的第三电机、驱动第三机械臂相对于第二机械臂运动的第四电机、驱动末端执行器相对于第三机械臂运动的第五电机以及驱动末端执行器带动其拿取的待冲压件运动的第六电机;所述末端执行器根据拿取待冲压件的需求不同设置为夹持部件、夹持手爪或吸盘中的一种。
79、本发明的有益效果为:
80、1、本发明提供的六自由度冲压机器人及其冲压方法中,首先由第一电机至第三电机分别控制腰部、第一机械臂、第二机械臂运动,由于第二机械臂的末端与第三机械臂的初始端相连接,因此,第三机械臂、末端执行器以及待冲压件会间接地被带动相对于冲压床的上模面和下模面运动,在s1步骤中通过实时监测六自由度冲压机器人的各个关节的位置以及运动参数数据,通过构建六自由度冲压机器人的齐次坐标矩阵,并计算各个关节的位姿变换矩阵进而可以计算得到第六关节在所述六自由度冲压机器人所处的基础坐标系下的空间位置矩阵p0(x6,y6,z6),通过各个关节的位姿变换矩阵的构建,可以有效地将各个关节所在的笛卡尔坐标系内的坐标,通过各个关节的位姿变换矩阵依次相乘而得到的空间位置转换矩阵而计算得到,进而可以只根据各个关节的笛卡尔坐标系内的运动参数得知其在基础坐标系内的空间坐标。
81、2、在本发明提供的六自由度冲压机器人及其冲压方法中,在s1步骤通过加入六自由度冲压机器人的惯性参数,结合得到的各个关节的笛卡尔运动矢量,进一步构建第一关节至第六关节的运动模型,该运动模型有效地考虑了各个关节所处位置、机械臂的重量以及质心所在基础坐标系内的位置,通过构建六自由度冲压机器人内部构件参数矩阵q对所关注到的关节所受到的各个轴输出动力的影响以及各个机械臂的自身重量、质心和长度对所关注到的关节的影响,进一步提高了采用最小二乘法优化第一关节至第六关节运动轨迹过程中的计算精确度;
82、采用有限傅里叶变换展开各个关节的实时笛卡尔角位移矢量、实时角速度矢量和实时角加速度矢量,使用有限傅里叶级数变换展开对各个关节的实时笛卡尔角位移矢量、实时角速度矢量和实时角加速度矢量瞬态响应的测量产生周期性响应预期,对每个关节的轨迹瞬间响应测量信号变换为谐波正弦和余弦函数的有限和,再采用最小二乘法对其进行优化,产生第一关节至第六关节的实时最优笛卡尔角位移矢量解集合c,进而可以对s1步骤中的第一电机至第三电机的驱动进行精确控制,使第一关节至第六关节按照实时最优笛卡尔角位移矢量解集合形成的最优运动轨迹,完成末端执行器带动待冲压件靠近冲压床上模面和下模面的过程,有效提高了轨迹规划的精确性和鲁棒性。
83、3、本发明提供的六自由度冲压机器人在末端执行器与第三机械臂同轴且未相对于第三机械臂发生90度相对运动的初始位置的上端面上设置有超声波测距模块,该模块由中央控制单片机在s1步骤过程中,通过超声波测距模块的超声波发射模块向冲压床的上模面发射超声波信号,并通过超声波接收模块接收反射回来的超声波信号,通过构建从t1时刻至tw时刻中的tw时刻的接收到的超声波信号计算模型:再采用tw-1时刻接收到的超声波信号的相位估计值和振幅估计值估计tw时刻接收到的超声波信号,计算估计值与真实值s(tw)之间的误差es(tw)后,进一步计算二者之间的梯度向量,最终判断二者之间的误差的海瑟矩阵是否为正定矩阵而判断末端执行器是否已经到达位于冲压床上模组和下模组之间的期望安全点处,因此,通过上述超声波测距模块的算法优化,可以有效提高超声波探测在末端执行器逐渐靠近冲压床上模面和下模面过程中,是否到达了期望安全点(xd1,yd1,zd1),此外,在s3步骤进一步调整六自由度冲压机器人的第三机械臂和末端执行器的姿态调整运动过程中,也采用了超声波测距模块来确定末端执行器带着待冲压件从冲压床的上模面和下模面之间的期望安全点(xd1,yd1,zd1)是否已经移动至下模面上的放置待冲压件的最优点(xd2,yd2,zd2);采用上述步骤优化超声波测距模块确定探测位置时,提高了超声波探测的精确度,避免六自由度机器人在进行s3步骤的姿态调整与s1步骤的靠近冲压床之间,以及s3步骤中将待冲压件放置在下模面上时无法有效确定是否到达准确位置而导致的误操作,或者超声波测距信号确定的不准确所导致的延时所带来的误操作,进一步提高了六自由度冲压机器人在人工智能化过程中的安全性。
84、4、本发明提供的六自由度冲压机器人及其冲压方法,在s3步骤时,控制第四电机至第六电机分别带动第三机械臂、末端执行器进行姿态调整运动,并开启超声波模块采用如s2步骤同样的超声波测距模块的探测方法,确定末端执行器夹持待冲压件的第六关节从冲压床上模组和下模组之间的期望安全点(xd1,yd1,zd1)到达冲压床下模面放至待冲压件的最优点(xd2,yd2,zd2)的时刻tw,best2,通过构建第四关节至第六关节的姿态调整最优模型,在第四关节至第六关节的转动角度-185°≤θ4≤185°、-150°≤θ5≤150°、-350°≤θ6≤350°的限定下,同时限定末端执行器距离冲压床下模面在基础坐标系中的竖直方向的距离t2小于等于第六关节在基础坐标系内距离下模面的最大垂直距离jmax,并大于等于距离下模面的最小垂直距离jmax,以及该过程中的超声波模块发射超声波过程中的能耗的限定下,得到第四电机至第六电机分别控制第四关节、第五关节和第六关节的实时最优笛卡尔运动矢量:q4,best2、q5,best2和q6,best2,进而在该过程中,按照上述得到的实时第四关节、第五关节和第六关节的最优笛卡尔运动矢量完成六自由度机器人拿取待冲压件从期望安全点至下模面放置最优点的过程。进一步优化了该过程中六自由度机器人的行走路径轨迹以及采用优化算法的超声波测距模块准确确定已经到达下模面放置最优点,进一步提高了整个过程的无缝衔接,提高了六自由度机器人的安全性和运行准确性。
- 还没有人留言评论。精彩留言会获得点赞!