一种机器人自检方法、系统和机器人示教器与流程
本发明涉及机器人控制领域,尤其涉及一种机器人自检方法、系统和机器人示教器。
背景技术:
1、现阶段工业机器人在各大生产领域应用广泛,是可以自动执行工作的机器装置,可根据不同的工作进行相关任务的程序编写,通过控制系统操纵机器人完成任务,从而在某些领域降低对人工劳动力的需求。随着机器人技术的不断进步,机器人的使用者不断增加,当使用者进行程序编写并运行程序时,容易出现机器人运行至奇异点、机器人参数不匹配导致运控报警、伺服报警等诸多问题,从而导致机器人的使用效率降低、寿命下降。
2、相关技术公开了一种机器人故障处理系统,可对所设置的运动参数进行检测与报警的处理。但该机器人故障处理系统仅对运动参数自身进行检测,自检性能不佳。
技术实现思路
1、鉴于此,本发明公开了一种机器人自检方法、系统和机器人示教器,用以解决现有机器人自检方案自检性能差的问题。
2、本发明为实现上述的目标,采用的技术方案是:
3、本发明第一方面公开了一种机器人自检方法,方法包括:
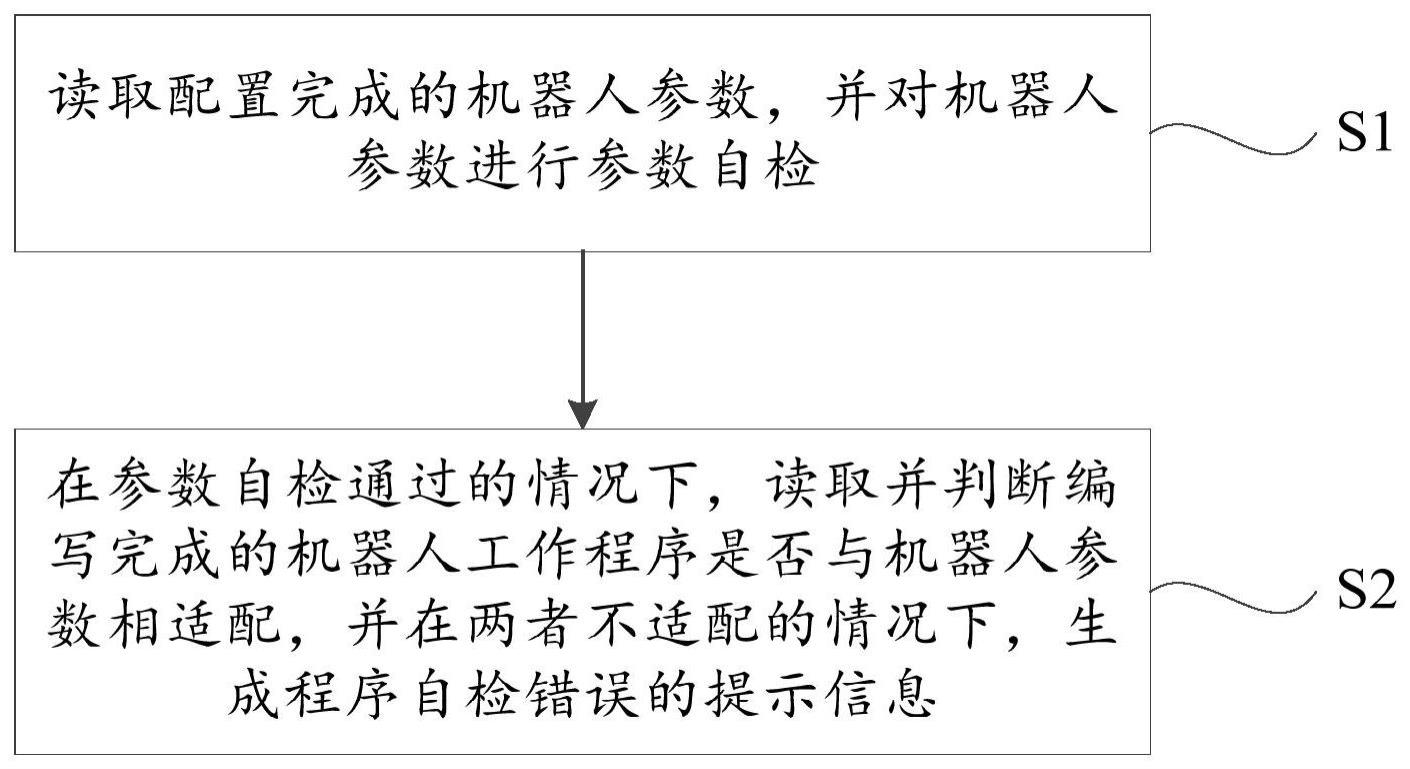
4、读取配置完成的机器人参数,并对机器人参数进行参数自检;
5、在参数自检通过的情况下,读取并判断编写完成的机器人工作程序是否与配置好的机器人参数相适配;在两者不适配的情况下,生成程序自检错误的提示信息。
6、进一步可选地,所述机器人参数包括机器人的运动参数和伺服驱动参数,对机器人参数进行参数自检包括:
7、将伺服驱动参数、运动参数一一对应地与预设的机器人伺服驱动参数范围和运动参数范围进行比较;
8、当伺服驱动参数、运动参数均处于对应的参数范围内,视为参数自检通过。
9、进一步可选地,判断编写完成的机器人工作程序是否与配置完成的机器人参数相适配,包括:
10、判断机器人工作程序中所用点位是否超出机器人工作空间;
11、在不超出机器人工作空间情况下,判断机器人工作程序中的运行指令是否正确;
12、若正确,视为程序自检通过;
13、若超出机器人工作空间或判定为运行指令有误,视为程序自检错误。
14、进一步可选地,判断机器人工作程序中的运行指令是否正确,包括:
15、判断机器人工作程序中是否存在奇异点;
16、若存在,视为运行指令不正确;
17、若不存在,视为运行指令正确。
18、进一步可选地,判断机器人工作程序中所用点位是否超出机器人工作空间,包括:
19、读取机器人的结构参数,根据结构参数计算工作空间;
20、计算给定起点、给定终点和所述工作空间内任一点组成的圆弧轨迹;
21、判断所述圆弧轨迹是否处于所述工作空间内,若是,视为所述圆弧轨迹上的点位均未超出所述工作空间;
22、若否,则确定超出所述工作空间的点位,并进行异常提示。
23、进一步可选地,所述确定超出所述工作空间的点位,包括:
24、将所述圆弧轨迹进行均分处理,得到多个指定点位;
25、根据所述圆弧轨迹的朝向、圆心位置、所述圆弧轨迹上多个指定点的坐标,来确定超出所述工作空间的点位。
26、进一步可选地,方法还包括:
27、在机器人接线端口已完成接线的情况下,响应于接线自检指令对机器人的接线情况进行自检,并在接线自检不通过的情况下,生成接线自检错误的提示信息。
28、进一步可选地,对机器人的接线情况进行自检,包括:
29、对接线端口进行置位操作;
30、获取接线端口在置位后的反馈信号,并判断反馈信号是否存在异常;
31、若反馈信号异常,视为接线自检不通过。
32、本发明第二方面公开了一种机器人自检系统,系统包括:
33、参数自检模块,用于读取配置完成的机器人伺服驱动参数、运动参数,并对机器人伺服驱动参数、运动参数进行参数自检;
34、程序自检模块,用于在参数自检通过的情况下,读取并判断编写完成的机器人工作程序是否与机器人参数相适配;
35、在两者不适配的情况下,生成程序自检错误的提示信息。
36、进一步可选地,所述机器人参数包括机器人的运动参数和伺服驱动参数,对机器人参数进行参数自检包括:
37、将机器人伺服驱动参数、运动参数一一对应地与预设的机器人伺服驱动参数范围和运动参数范围进行比较;
38、当伺服驱动参数、运动参数均处于对应的参数范围内,视为参数自检通过。
39、进一步可选地,判断编写完成的机器人工作程序是否与机器人参数相适配,包括:
40、判断机器人工作程序中所用点位是否超出机器人工作空间;
41、在不超出机器人工作空间情况下,判断机器人工作程序中的运行指令是否正确;
42、若正确,视为程序自检通过;
43、若超出机器人工作空间或判定为运行指令有误,视为程序自检错误。
44、进一步可选地,判断机器人工作程序中的运行指令是否正确,包括:
45、判断机器人工作程序中是否存在奇异点;
46、若存在,视为运行指令不正确;
47、若不存在,视为运行指令正确。
48、进一步可选地,判断机器人工作程序中所用点位是否超出机器人工作空间,包括:
49、读取机器人的结构参数,根据结构参数计算工作空间;
50、计算给定起点、给定终点和所述工作空间内任一点组成的圆弧轨迹;
51、判断所述圆弧轨迹是否处于所述工作空间内,若是,视为所述圆弧轨迹上的点位均未超出所述工作空间;
52、若否,则确定超出所述工作空间的点位,并进行异常提示。
53、进一步可选地,所述确定超出所述工作空间的点位,包括:
54、将所述圆弧轨迹进行均分处理,得到多个指定点位;
55、根据所述圆弧轨迹的朝向、圆心位置、所述圆弧轨迹上多个指定点的坐标,来确定超出所述工作空间的点位。
56、进一步可选地,系统还包括:
57、接线自检模块,用于在机器人接线端口已完成接线的情况下,响应于接线自检指令对机器人的接线情况进行自检,并在接线自检不通过的情况下,生成接线自检错误的提示信息。
58、进一步可选地,对机器人的接线情况进行自检,包括:
59、对接线端口进行置位操作;
60、获取接线端口在置位后的反馈信号,并判断反馈信号是否存在异常;
61、若反馈信号异常,视为接线自检不通过。
62、本发明第三方面公开了一种机器人示教器,机器人示教器采用如第一方面中任一项所提供的方法,和/或包括如第二方面所提供的系统。
63、有益效果:本发明能够对配置好的机器人参数进行自检,对编写好的机器人工作程序与通过自检的机器人参数是否适配进行自检,提高了机器人自检性能,可以提高机器人的使用效率、使用寿命。
- 还没有人留言评论。精彩留言会获得点赞!