一种轮足式巡检机器人及运动控制方法与流程
本发明涉及电力巡检机器人,具体为一种轮足式巡检机器人及运动控制方法。
背景技术:
1、变电站作为电力传输系统的重要环节之一,其可靠性与安全性一直受到关注。而变电站的巡检工作占据了电网变电站工作的40%左右,随着变电站数量的不断增加,巡检的及时性与有效性也难以保证。随着机器人技术的快速发展,越来越多的巡检机器人被用于变电站的电力设备检测,从而降低巡检人员的工作量,减少巡检过程中出现的误差,从根本上提升巡检的质量与效率。
2、巡检机器人能够定时、定点、定轨迹地开展巡检工作。目前巡检机器人主要分为轨道式、地面移动式等。其中地面移动式巡检机器人能过够适用于室内室外两种环境,同时不需要进行环境改造,这也是巡检机器人的发展趋势之一。地面移动式巡检机器人又根据机器人本体的形式分为轮式、履带式和足式三种典型结构,轮式机器人本体具有较高的运动效率,目前在变电站巡检中应用较多,但轮式机器人对于变电站平地、草地、楼梯以及斜坡等复杂环境的适应性较差;足式机器人本体能够适应复杂环境下巡检任务,满足变电站室内室外的多变环境,具有更高的灵活性及便捷性。
3、而轮足式巡检机器人的运动模式一般分为三种,第一种是轮式运动模式,第二种是足式运动模式,第三种是两种模式之间的过渡模式。目前复合运动模式的足式巡检机器人运动控制方法是采用多种独立的控制方法,通过传感器的反馈或者任务规划,调用不同的运动控制程序实现不同的运动模式切换。如何通过统一的运动控制方法实现多运动模式的轮足巡检机器人的运动控制,使得轮足巡检机器人具备更高效的运动模式,也是亟待解决的关键问题之一。
4、为此,提出了一种轮足式巡检机器人及运动控制方法,以解决上述问题。
技术实现思路
1、本发明的目的在于提供一种轮足式巡检机器人及运动控制方法,结构紧凑,具备高效率的轮式运动模式和高适应性的足式运动模式;通过建立中枢模式发生器神经元模型,依据中枢模式发生器神经元运动控制方法,对轮足式巡检机器人进行仿生运动控制,融合了传统轮式机器人和足式机器人的运动形式,实现了轮足式巡检机器人的多运动模式控制及切换,并使得轮足式巡检机器人能够适应复杂的运动环境,解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
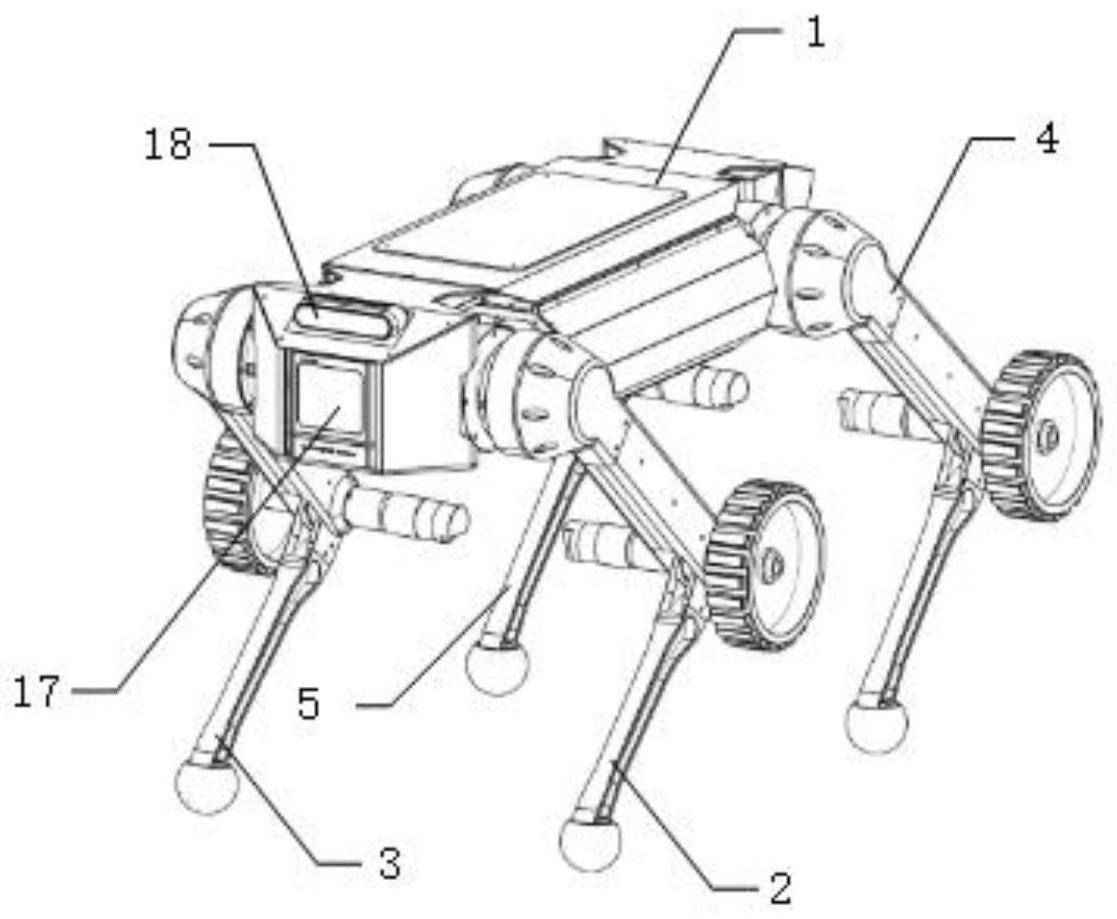
3、一种轮足式巡检机器人,包括机器人躯干,所述机器人躯干的前端侧壁对称安装有两组足式运动机构一,所述机器人躯干的后端侧壁对称安装有两组足式运动机构二,足式运动机构一和足式运动机构二相互配合使得巡检机器人进行足式运动;所述足式运动机构一上安装有轮式运动机构一,所述足式运动机二上安装有轮式运动机构二,轮式运动机构一和轮式运动机构二相互配合使得巡检机器人进行轮式运动。
4、优选的,所述足式运动机构一包括左前机械腿和右前机械腿,所述足式运动机构二包括左后机械腿和右后机械腿;所述足式运动机构一和足式运动机构二具有相同结构,均包括偏转髋关节电机,所述偏转髋关节电机通过电机u形连接件活动安装有俯仰髋关节电机,所述俯仰髋关节电机的一端活动安装有膝关节电机,所述膝关节电机上活动安装有大腿连杆,所述大腿连杆的一端活动安装有小腿连杆。
5、优选的,所述膝关节电机的输出轴上安装有同步轮一,所述大腿连杆的一端安装有与同步轮一相互配合的同步轮二,所述同步轮一和同步轮二之间设有同步带,所述同步轮二与小腿连杆转动连接。
6、优选的,所述轮式运动机构一和轮式运动机构二具有相同结构,均包括轮式减速电机,所述轮式减速电机安装在大腿连杆的一端侧壁上,所述大腿连杆的另一端侧壁上转动安装有驱动轮,所述轮式减速电机通过输出轴与驱动轮连接,当轮式减速电机转动时使得驱动轮转动。
7、优选的,所述机器人躯干上安装有三维激光雷达,所述三维激光雷达的上方安装有立体视觉传感器。
8、优选的,所述膝关节电机和大腿连杆上均设有保护壳,以避免同步轮一、同步轮二和同步带受到灰尘影响。
9、优选的,所述小腿连杆末端设有球形足端,球形足端使得巡检机器人能够适应不同的地形。
10、一种轮足式巡检机器人运动控制方法,包括以下步骤:建立中枢模式发生器神经元模型,根据所述中枢模式发生器神经元模型对巡检机器人进行足式运动控制设定;根据所述中枢模式发生器神经元模型对巡检机器人进行轮式运动控制设定;根据所述中枢模式发生器神经元模型对巡检机器人进行从足式运动到轮式运动的转换控制设定;根据所述中枢模式发生器神经元模型对巡检机器人进行从轮式运动到足式运动的转换控制设定。
11、优选的,所述中枢模式发生器神经元模型如下式:
12、
13、式中,θi为中枢模式发生器神经元的状态变量;ωi为中枢模式发生器神经元的频率参数;wij为中枢模式发生器神经元间的耦合权重,通常取为w;为中枢模式发生器神经元的相位差;ai为中枢模式发生器神经元的输出。
14、优选的,所述足式运动控制设定包括以下步骤:步骤s101、设置四个中枢模式发生器神经元,四个中枢模式发生器神经元相互之间双向耦合,保证中枢模式发生器神经元能够快速地收敛同步;
15、步骤s102、设置不同步态的中枢模式发生器神经元运动相位;设置行走步态的中枢模式发生器神经元相位差为π/2,设置对角小跑步态的中枢模式发生器神经元相位差为π;
16、步骤s103、定义巡检机器人的足式运动机构一和足式运动机构二的俯仰髋关节运动控制轨迹为f1(ai)函数,定义巡检机器人的足式运动机构一和足式运动机构二的膝关节运动控制轨迹为f2(ai)函数;对中枢模式发生器神经元运动相位进行变换,保证巡检机器人的俯仰髋关节、膝关节运动控制轨迹稳定且连续,通过下式描述:
17、
18、式中,x1为当前步态的相位差,x2为目标步态的相位差,t1为步态切换的起始时刻,t2为步态切换的结束时刻;
19、所述轮式运动控制设定包括以下步骤:步骤s201、定义轮式减速电机的控制函数分别为f1(a1)、f2(a2)、f3(a3)、f4(a4),并建立控制函数,如下式:
20、fi(ai)=kiai,
21、式中,ki为足式运动机构一和足式运动机构二上的轮式减速电机的速度控制系数;步骤s202、判断巡检机器人的运动状态,并调节控制轮式减速电机;当巡检机器人处于前进运动时,ki为相同的值,则通过ki调节速度,保证足式运动机构一和足式运动机构二上的轮式减速电机的速度同步;
22、步骤s203、判断巡检机器人的运动状态,并调节控制轮式减速电机;当巡检机器人处于左转或右转运动时,ki为相同的值,则通过ki调节速度,使得左前机械腿和左后机械腿上的轮式减速电机速度与右前机械腿和右后机械腿上的轮式减速电机速度不同,实现差速转弯;
23、步骤s204、判断巡检机器人的运动状态,并调节控制轮式减速电机;当巡检机器人处于原地转弯时,ki为相同的值,则通过ki调节速度,使得左前机械腿和左后机械腿上的轮式减速电机速度与右前机械腿和右后机械腿上的轮式减速电机速度相同,但转向相反实现巡检机器人左转运动或右转运动;
24、所述足式运动到轮式运动的转换控制设定包括以下步骤:步骤s301、对俯仰髋关节运动控制轨迹函数f1(ai)和膝关节运动控制轨迹函数f2(ai)进行修改,如下式:
25、
26、式中,φ1为当前关节位置,φ2为目标关节位置,t3为步态切换的起始时刻,t4为步态切换的结束时刻;
27、步骤s302、将足式运动机构一和足式运动机构二的中枢模式发生器神经元相位差修改为0,使得中枢模式发生器神经元完全同步;中枢模式发生器神经元完全同步后,触发足式运动机构一和足式运动机构二上的轮式减速电机的控制函数fi(ai)=kiai,实现轮式运动的切换;
28、所述轮式运动到足式运动的转换控制设定包括以下步骤:步骤s401、屏蔽足式运动机构一和足式运动机构二上的轮式减速电机的控制函数fi(ai)=kiai,停止轮式运动;并将足式运动机构一和足式运动机构二的中枢模式发生器神经元相位差修改为0,使得中枢模式发生器神经元完全同步;
29、步骤s402、对俯仰髋关节运动控制轨迹函数f1(ai)和膝关节运动控制轨迹函数f2(ai)进行修改,实现足式运动的切换,如下式:
30、
31、式中,φ2为当前关节位置,φ1为目标关节位置,t5为步态切换的起始时刻,t6为步态切换的结束时刻。
32、与现有技术相比,本发明的有益效果为:
33、本发明所述的一种轮足式巡检机器人及运动控制方法,结构紧凑,具备高效率的轮式运动模式和高适应性的足式运动模式;通过建立中枢模式发生器神经元模型,依据中枢模式发生器神经元运动控制方法,对轮足式巡检机器人进行仿生运动控制,融合了传统轮式机器人和足式机器人的运动形式,实现了轮足式巡检机器人的多运动模式控制及切换,并使得轮足式巡检机器人能够适应复杂的运动环境。
- 还没有人留言评论。精彩留言会获得点赞!