机械臂自适应标定方法、装置、设备及介质与流程
本技术属于系统标定,具体涉及一种机械臂自适应标定方法、装置、设备及介质。
背景技术:
1、随着机械臂功能的不断完善,利用机械臂执行精密任务变得越来越普遍。为了能够更好地控制机械臂的运动,使得机械臂能够更加准确地到达目标位置以及更加可靠地执行任务,对机械臂系统与光学定位系统的标定变得十分重要。
2、现有的机械臂系统与光学定位系统标定的方式主要是分别采集机械臂系统以及光学定位系统下的同一标记物的不同坐标值,进而利用手眼标定计算各坐标值之间的转换关系,以获取当前状态下机械臂系统与光学定位系统的标定关系,在机械臂系统以及光学定位系统中的至少一个系统位置或者相对位姿发生改变时,需要重新进行系统标定,以重新获取机械臂系统与光学定位系统的标定关系。
3、由于现有技术中为了提高系统标定的准确性需要采集大量的数据,且机械臂基座采用的是六维坐标系,利用手眼标定算法进行系统标定的计算过程较为复杂,且标定完成后机械臂系统与光学定位系统的相对位姿已经确定,一旦两者相对位置发生变化,就会导致原先的标定结果失效,无法继续控制机械臂系统正常工作,因此,利用现有技术存在标定步骤繁琐、标定效率低以及标定方法适应性较差的问题。
技术实现思路
1、本技术实施例的目的是提供一种机械臂自适应标定方法、装置、设备及介质,解决了现有技术中存在的标定步骤繁琐、标定效率低以及标定方法适应性较差的问题,通过识别标定系统中的机械臂固定端坐标系与光学定位系统坐标系间的相对位姿是否发生变化,并获取标定系统中的机械臂移动端坐标系与光学定位系统坐标系之间的位姿关系以及机械臂固定端坐标系与机械臂移动端坐标系之间的位姿关系,进而根据所述第一位姿关系、所述第二位姿关系以及预先确定的所述机械臂固定端坐标系与光学定位系统坐标系之间的标定关系表达式,确定所述标定系统的标定更新结果,可以在无需重新标定的前提下对机械臂系统与光学定位系统进行标定更新,提高了标定效率以及标定方法适应性。
2、第一方面,本技术实施例提供了一种机械臂自适应标定装置,所述方法包括:
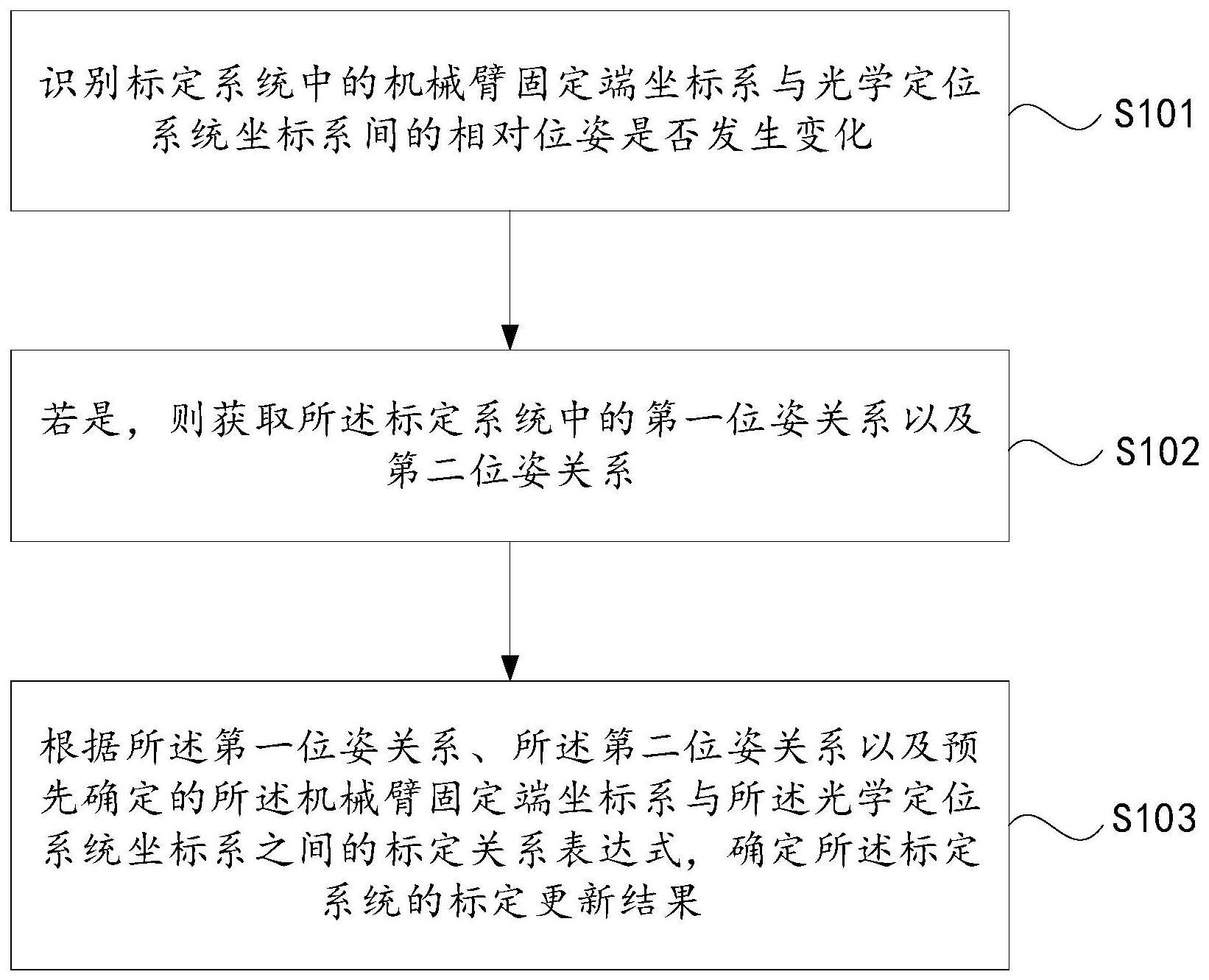
3、识别标定系统中的机械臂固定端坐标系与光学定位系统坐标系间的相对位姿是否发生变化;
4、若是,则获取所述标定系统中的第一位姿关系以及第二位姿关系;其中,所述第一位姿关系包括机械臂移动端坐标系与所述光学定位系统坐标系之间的位姿关系;所述第二位姿关系包括所述机械臂固定端坐标系与所述机械臂移动端坐标系之间的位姿关系;
5、根据所述第一位姿关系、所述第二位姿关系以及预先确定的所述机械臂固定端坐标系与所述光学定位系统坐标系之间的标定关系表达式,确定所述标定系统的标定更新结果。
6、进一步的,所述获取所述标定系统中的第一位姿关系以及第二位姿关系,包括:
7、计算所述机械臂移动端坐标系与所述光学定位系统坐标系之间的第一变换矩阵和第二变换矩阵;其中,所述第一变换矩阵包括所述机械臂移动端坐标系与所述光学定位系统坐标系之间旋转矩阵;所述第二变换矩阵包括所述机械臂移动端坐标系与所述光学定位系统坐标系之间平移矩阵;
8、获取所述机械臂固定端坐标系与机械臂移动端坐标系之间的第三变换矩阵和第四变换矩阵;其中,所述第三变换矩阵包括所述机械臂固定端坐标系与机械臂移动端坐标系之间的旋转矩阵;所述第四变换矩阵包括所述机械臂固定端坐标系与机械臂移动端坐标系之间的平移矩阵。
9、进一步的,所述机械臂移动端包括:机械臂末端以及执行工具;所述执行工具固定于所述机械臂末端;
10、相应的,所述方法还包括:
11、根据预先确定的所述机械臂末端坐标系与所述执行工具坐标系之间的位姿关系,确定第三位姿关系;
12、相应的,根据所述第一位姿关系、所述第二位姿关系以及预先确定的所述机械臂固定端坐标系与光学定位系统坐标系之间的标定关系表达式,确定所述标定系统的标定更新结果,包括:
13、根据所述第一位姿关系、所述第二位姿关系、所述第三位姿关系以及预先确定的所述机械臂固定端坐标系与光学定位系统坐标系之间的标定关系表达式,确定所述标定系统的标定更新结果。
14、进一步的,所述预先确定的机械臂固定端坐标系与光学定位系统坐标系之间的标定关系表达式,包括:
15、
16、其中,表示所述机械臂固定端坐标系与所述光学定位系统坐标系的第一标定更新结果;表示所述机械臂固定端坐标系与所述光学定位系统坐标系的第二标定更新结果;表示所述机械臂固定端坐标系与所述机械臂末端坐标系之间的第三变换矩阵;表示所述机械臂固定端坐标系与所述机械臂末端坐标系之间的第四变换矩阵;表示所述执行工具坐标系与所述光学定位系统坐标系之间的第一变换矩阵;表示所述执行工具坐标系与所述光学定位系统坐标系之间的第二变换矩阵;表示机械臂末端坐标系与所述执行工具坐标系的第五变换矩阵;表示机械臂末端坐标系与所述执行工具坐标系的第六变换矩阵。
17、进一步的,所述机械臂固定端坐标系与光学定位系统坐标系之间的标定关系表达式的确定过程,包括:
18、计算所述第一变换矩阵以及所述第二变换矩阵;
19、计算所述机械臂固定端坐标系与所述光学定位系统坐标系的第七变换矩阵;
20、分别计算所述第五变换矩阵以及所述第六变换矩阵;
21、根据所述第一变换矩阵、所述第二变换矩阵、所述第三变换矩阵、所述第四变换矩阵、所述第五变换矩阵以及所述第六变换矩阵,确定所述机械臂固定端坐标系与所述光学定位系统坐标系之间的标定关系表达式。
22、进一步的,所述计算所述机械臂固定端坐标系与所述光学定位系统坐标系的第七变换矩阵,包括:
23、构建所述机械臂末端坐标系与所述执行工具坐标系的位姿关系;
24、根据所述位姿关系、所述第一变换矩阵以及所述第三变换矩阵,计算所述第七变换矩阵。
25、进一步的,所述分别计算所述第五变换矩阵以及所述第六变换矩阵,包括:
26、根据所述机械臂末端坐标系与所述执行工具坐标系的位姿关系、所述第一变换矩阵、所述第三变换矩阵以及所述第七变换矩阵,计算所述第五变换矩阵;
27、根据所述第一变换矩阵以及所述第二变换矩阵,构建机械臂末端中心在所述执行工具坐标系与所述光学定位系统坐标系间的第一坐标关系,以及,构建执行工具原点在所述执行工具坐标系与所述光学定位系统坐标系间的第二坐标关系;
28、根据所述第一坐标关系以及所述第二坐标关系,计算所述第六变换矩阵。
29、进一步的,所述根据所述第一变换矩阵、所述第二变换矩阵、所述第三变换矩阵、所述第四变换矩阵、所述第五变换矩阵以及所述第六变换矩阵,确定所述机械臂固定端坐标系与光学定位系统坐标系之间的标定关系表达式,包括:
30、构建所述光学定位系统坐标系与所述机械臂固定端坐标系的位姿关系;
31、根据所述光学定位系统坐标系与所述机械臂固定端坐标系的位姿关系、所述第一变换矩阵、所述第三变换矩阵、所述第五变换矩阵,计算所述第一标定更新结果;
32、根据所述第二变换矩阵、所述第三变换矩阵、所述第四变换矩阵、所述第五变换矩阵以及所述第六变换矩阵,确定所述第二标定更新结果。
33、进一步的,所述光学定位系统坐标系与所述机械臂固定端坐标系的位姿关系包括:
34、
35、其中,表示所述机械臂末端坐标系与所述执行工具坐标系的位姿关系;表示所述机械臂固定端坐标系与所述机械臂末端坐标系的位姿关系;表示所述执行工具坐标系与所述光学定位系统坐标系的位姿关系。
36、第二方面,本技术实施例提供了一种机械臂自适应标定方法,所述方法包括:
37、识别模块,用于识别标定系统中的机械臂固定端坐标系与光学定位系统坐标系间的相对位姿是否发生变化;
38、位姿关系获取模块,用于在识别到标定系统中的机械臂固定端坐标系与光学定位系统坐标系间的相对位姿发生变化的情况下,获取所述标定系统中的第一位姿关系以及第二位姿关系;其中,所述第一位姿关系包括所述机械臂移动端坐标系与所述光学定位系统坐标系之间的位姿关系;所述第二位姿关系包括所述机械臂固定端坐标系与机械臂移动端坐标系之间的位姿关系;
39、标定更新模块,用于根据所述第一位姿关系、所述第二位姿关系以及预先确定的所述机械臂固定端坐标系与光学定位系统坐标系之间的标定关系表达式,确定所述标定系统的标定更新结果。
40、进一步的,所述位姿关系获取模块,具体用于:
41、计算所述机械臂移动端坐标系与所述光学定位系统坐标系之间的第一变换矩阵和第二变换矩阵;其中,所述第一变换矩阵包括所述机械臂移动端坐标系与所述光学定位系统坐标系之间旋转矩阵;所述第二变换矩阵包括所述机械臂移动端坐标系与所述光学定位系统坐标系之间平移矩阵;
42、获取所述机械臂固定端坐标系与机械臂移动端坐标系之间的第三变换矩阵和第四变换矩阵;其中,所述第三变换矩阵包括所述机械臂固定端坐标系与机械臂移动端坐标系之间的旋转矩阵;所述第四变换矩阵包括所述机械臂固定端坐标系与机械臂移动端坐标系之间的平移矩阵。
43、进一步的,所述机械臂移动端包括:机械臂末端以及执行工具;所述执行工具固定于所述机械臂末端;
44、相应的,所述装置还包括:
45、第三位姿关系确定模块,用于根据预先确定的所述机械臂末端坐标系与所述执行工具坐标系之间的位姿关系,确定第三位姿关系;
46、相应的,所述标定更新模块,具体用于:
47、根据所述第一位姿关系、所述第二位姿关系、所述第三位姿关系以及预先确定的所述机械臂固定端坐标系与光学定位系统坐标系之间的标定关系表达式,确定所述标定系统的标定更新结果。
48、进一步的,所述预先确定的机械臂固定端坐标系与光学定位系统坐标系之间的标定关系表达式,包括:
49、
50、其中,表示所述机械臂固定端坐标系与所述光学定位系统坐标系的第一标定更新结果;表示所述机械臂固定端坐标系与所述光学定位系统坐标系的第二标定更新结果;表示所述机械臂固定端坐标系与所述机械臂末端坐标系之间的第三变换矩阵;表示所述机械臂固定端坐标系与所述机械臂末端坐标系之间的第四变换矩阵;表示所述执行工具坐标系与所述光学定位系统坐标系之间的第一变换矩阵;表示所述执行工具坐标系与所述光学定位系统坐标系之间的第二变换矩阵;表示机械臂末端坐标系与所述执行工具坐标系的第五变换矩阵;表示机械臂末端坐标系与所述执行工具坐标系的第六变换矩阵。
51、进一步的,所述装置还包括:
52、第一计算模块,用于计算所述第一变换矩阵以及所述第二变换矩阵;
53、第二计算模块,用于计算所述机械臂固定端坐标系与所述光学定位系统坐标系的第七变换矩阵;
54、第三计算模块,用于分别计算所述第五变换矩阵以及所述第六变换矩阵;
55、表达式确定模块,用于根据所述第一变换矩阵、所述第二变换矩阵、所述第三变换矩阵、所述第四变换矩阵、所述第五变换矩阵以及所述第六变换矩阵,确定所述机械臂固定端坐标系与所述光学定位系统坐标系之间的标定关系表达式。
56、进一步的,所述第二计算模块,具体用于:
57、构建所述机械臂末端坐标系与所述执行工具坐标系的位姿关系;
58、根据所述位姿关系、所述第一变换矩阵以及所述第三变换矩阵,计算所述第七变换矩阵。
59、进一步的,所述第三计算模块,具体用于:
60、根据所述机械臂末端坐标系与所述执行工具坐标系的位姿关系、所述第一变换矩阵、所述第三变换矩阵以及所述第七变换矩阵,计算所述第五变换矩阵;
61、根据所述第一变换矩阵以及所述第二变换矩阵,构建机械臂末端中心在所述执行工具坐标系与所述光学定位系统坐标系间的第一坐标关系,以及,构建执行工具原点在所述执行工具坐标系与所述光学定位系统坐标系间的第二坐标关系;
62、根据所述第一坐标关系以及所述第二坐标关系,计算所述第六变换矩阵。
63、进一步的,所述表达式确定模块,具体用于:
64、构建所述光学定位系统坐标系与所述机械臂固定端坐标系的位姿关系;
65、根据所述光学定位系统坐标系与所述机械臂固定端坐标系的位姿关系、所述第一变换矩阵、所述第三变换矩阵、所述第五变换矩阵,计算所述第一标定更新结果;
66、根据所述第二变换矩阵、所述第三变换矩阵、所述第四变换矩阵、所述第五变换矩阵以及所述第六变换矩阵,确定所述第二标定更新结果。
67、进一步的,所述光学定位系统坐标系与所述机械臂固定端坐标系的位姿关系包括:
68、
69、其中,表示所述机械臂末端坐标系与所述执行工具坐标系的位姿关系;表示所述机械臂固定端坐标系与所述机械臂末端坐标系的位姿关系;表示所述执行工具坐标系与所述光学定位系统坐标系的位姿关系。
70、第三方面,本技术实施例提供了一种电子设备,该电子设备包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如第一方面所述的方法的步骤。
71、第四方面,本技术实施例提供了一种可读存储介质,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如第一方面所述的方法的步骤。
72、第五方面,本技术实施例提供了一种芯片,所述芯片包括处理器和通信接口,所述通信接口和所述处理器耦合,所述处理器用于运行程序或指令,实现如第一方面所述的方法。
73、在本技术实施例中,识别标定系统中的机械臂固定端坐标系与光学定位系统坐标系间的相对位姿是否发生变化;若是,则获取所述标定系统中的第一位姿关系以及第二位姿关系;其中,所述第一位姿关系包括机械臂移动端坐标系与所述光学定位系统坐标系之间的位姿关系;所述第二位姿关系包括所述机械臂固定端坐标系与所述机械臂移动端坐标系之间的位姿关系;根据所述第一位姿关系、所述第二位姿关系以及预先确定的所述机械臂固定端坐标系与所述光学定位系统坐标系之间的标定关系表达式,确定所述标定系统的标定更新结果。通过上述机械臂自适应标定方法,解决了现有技术中存在的标定步骤繁琐、标定效率低以及标定方法适应性较差的问题,通过识别标定系统中的机械臂固定端坐标系与光学定位系统坐标系间的相对位姿是否发生变化,并获取标定系统中的机械臂移动端坐标系与光学定位系统坐标系之间的位姿关系以及机械臂固定端坐标系与机械臂移动端坐标系之间的位姿关系,进而根据所述第一位姿关系、所述第二位姿关系以及预先确定的所述机械臂固定端坐标系与光学定位系统坐标系之间的标定关系表达式,确定所述标定系统的标定更新结果,可以在无需重新构建标定关系的前提下对机械臂系统与光学定位系统进行标定更新,提高了标定效率以及标定方法适应性。
- 还没有人留言评论。精彩留言会获得点赞!