一种辐射环境下机器人关节模组测控平台
本发明属于特种机器人领域,具体来说涉及一种辐射环境下机器人关节模组测控平台。
背景技术:
1、关节模组作为组成机器人最重要的核心单元,关节模组内部集成了伺服驱控器、大中空伺服关节电机、精确的位置反馈传感器、输出动力相匹配的谐波减速器,用于完成机器人高精度动力源的输出,是机器人核心技术之一。关节模组与关节连杆装配组成单关节链,单关节链之间通过过渡弯头进行串联或者并联组成整个机器人。机器人这种拓扑结构使得关节模组测试平台与常规电机对拖平台有很大不同。通常,传统电机对拖平台通过在普通环境下长时间对拖运转,暴露待测被拖电机故障,用于待测电机耐久性测试试验。在常规电机测试时,基于堵转对拖模拟加载原理,试验台架通常是两电机以“背靠背”水平卧式布置,在安装方式上,两电机安装固定于地平铁上的u型支撑架上。因此,根据常规对拖平台的机械布局和安装方式可知,常规对拖测试平台重点考察和关注:测试减速器的传动精度、扭转刚度、转动刚度、减速器的振动和温度,测试电机的五轴曲线,以及验证电机先进控制算法、电机工作在发电机状态下的能量回馈过程,谐波特性等。
2、然而,目前很少关注两电机或者多电机空间对拖下的运动学和动力学特性。此外,对于电机电控部分,传统的对拖平台一般用于测试变频器的调速性能。由于变频器只有速度环和电流环,使得传统电机对拖平台在测试电机电控方面更关注变频调速和负载特性。而机器人的关节模组是一个伺服驱控系统,不仅有速度环、电流环,还有位置环,机器人关节模组的伺服驱控系统测试时不仅要关注变频调速和负载特性,还要重点考察机器人关节模组伺服的动态跟随特性、重复定位精度、外界抗干扰性和参数自适应和辨识性,而这些恰恰正是机器人关节模组所考察的核心和重点。
3、在现有技术中,发明专利cn110057576a提出了一种足式仿生机器人腿关节动态测试平台,该平台用于三个电驱动模组组合运动的分析及测试,可以准确分析不同体重的机器人蹲下、起立、走、跑、跳多种运动模态对电驱动模组的转矩、转速、功率轨迹需求,但此专利中的方法和结构形式过于简单,仅仅针对的是普通环境下足类机器人。而核工业机器人在大型回旋型辐照中心辐照测试时,不仅要考察机器人关节模组伺服系统动态响应特性以及多关节模组之间空间对拖时的运动学和动力学特性,还要对测控软硬件平台和数据传输的冗余性有特殊要求。确保考核的机器人关节模组的相关参数数据一定能被测试室上位机接收。
4、机器人关节模组在辐射中心评估和考核测试时,对辐照考核剂量率有一定的要求,辐照测试时需要提前预约进行剂量点/率标定,辐照测试的过程周期长、费用高昂。因此,在一次机器人关节模组辐照考核测试时,不仅要从宏观上获得机器人关节模组整体性能退化情况,更需要尽可能多获得机器人关节模组伺服系统内部综合电子电路的关键信号以及板级组合电路中关键元器件电参数,以期更加真实的评估关节模组的总体耐辐射水平和薄弱环节。同时,由于电子电路系统中的大部分元器件在辐照测试时存在退火效应,根据美军标mil-std-883d-1019.4-1019.7以及qj10004-2008等相关辐照测试考核标准,要求辐照中心的辐照源离线后,在2h内完成对关节模组整体健康状态检查、完成综合电子电路系统检测、关键元器件电参数测试。
技术实现思路
1、基于上述问题和机器人关节模组的特殊测试需求,不仅要求机器人关节模组测控平台在回旋型辐照中心具有一定的通用性、可快速移动性;同时,还要求测试人员在辐照中心外的测试室通过关节模组软件测试平台可实时实现远程控制、数据采集、数据处理分析与保存的功能。此外,为了更加有效的评估关节模组的抗辐射性能以及考核关节模组的抗辐射加固保证技术,在测试方法上有相互对照组,测试数据相互对比,方便分析关节模组发生不同失效类型下的累计剂量。
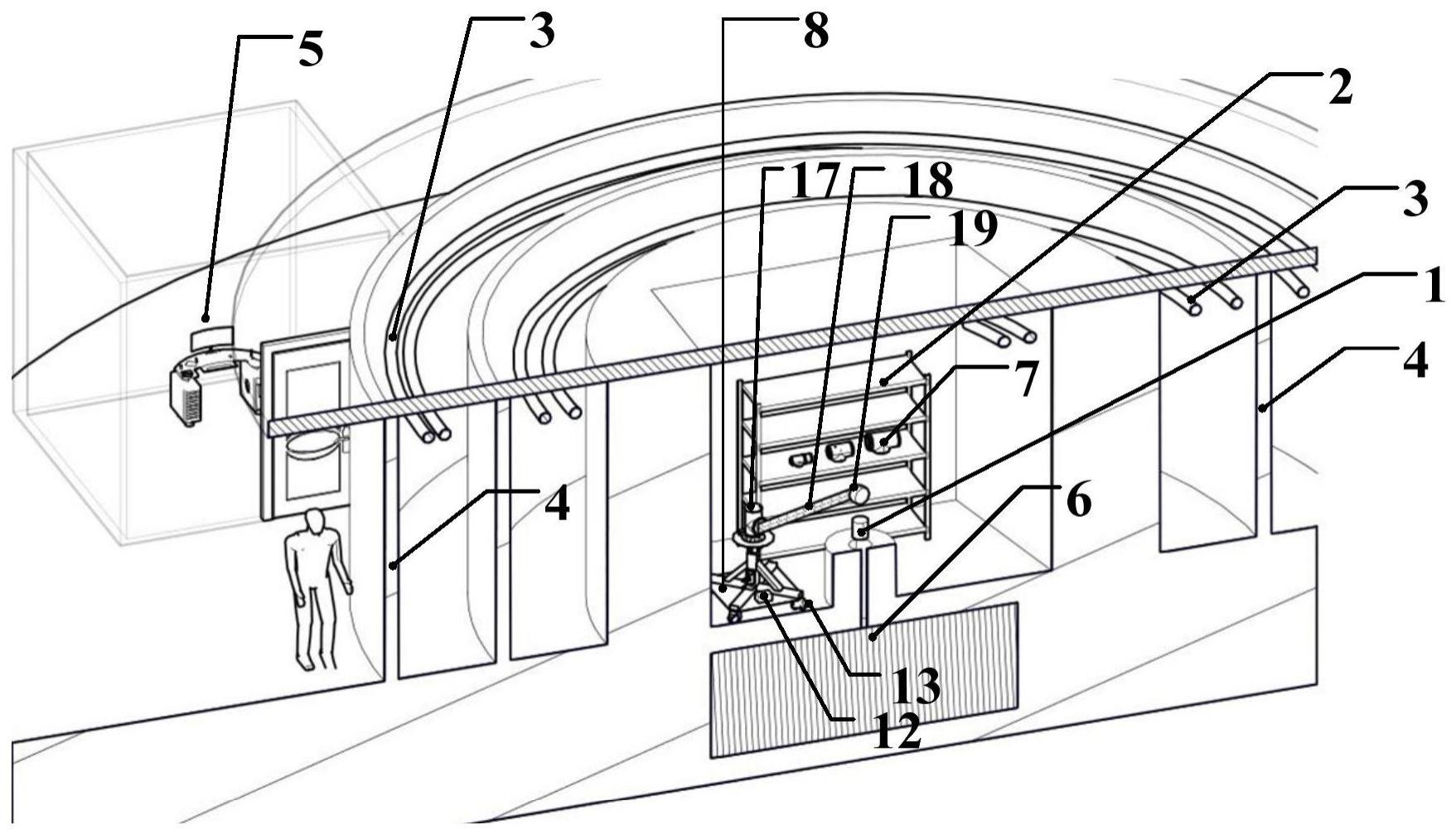
2、具体的,本发明提供一种辐射环境下机器人关节模组测控平台,所述辐射环境下机器人关节模组测控平台包括辐射测试室、人员测试室、带电辐照测试组、非带电辐照测试组、带电非辐照测试组以及测控模块;
3、所述辐射测试室设有放射源、带电辐照测试组和非带电辐照测试组;
4、所述辐射测试室外侧设有多层回旋形通道屏蔽墙,通过所述多层回旋形通道屏蔽墙进一步屏蔽辐射并连接所述人员测试室,人员测试室内部有带电非辐照测试组;
5、所述带电辐照测试组、带电非辐照测试组和非带电辐照测试组均包括待测关节模组;
6、所述人员测试室设有带电非辐照测试组和测控模块;
7、所述测控模块包括参数管理模块、状态监控模块、参数性能分析模块、数据存储模块,所述测控模块用于实现所述待测关节模组测试参数的远程控制、数据采集、数据处理分析与保存功能。
8、更近一步地,所述带电辐照测试组和带电非辐照测试组还包括通用型立式支撑台,支撑面,电缸升降柱,电缸驱动电机、屏蔽铅块、万向轮、待测关节模组、等效负载轮和机器人关节连杆;
9、所述通用型立式支撑台的支撑面和电缸升降柱起到对测控硬件平台支撑作用,用于支撑待测关节模组;所述电缸升降柱在机器人关节链连杆装配和长度固定的情况下,可满足机器人多关节对拖对空间位姿调整的需求;所述电缸驱动电机用于驱动电缸抬升升降柱;所述屏蔽铅块用于电缸驱动电机和数据采集卡的物理屏蔽,确保电缸驱动电机和数据采集卡不会出现辐射故障效应;所述万向轮方便在多层回旋形通道运送和组装待测关节模组样品。
10、更近一步地,所述带电辐照测试组和带电非辐照测试组还可以增设碰撞测试台,所述碰撞测试台包括通用型立式支撑台,支撑面,电缸升降柱,电缸驱动电机、屏蔽铅块、万向轮、支柱固定夹和管状物体;
11、所述碰撞测试台中支撑结构与带电辐照测试组相同,支撑结构上的管状物体可以通过支柱固定夹连接紧固,每次只需要调整紧固固定支柱夹把手,即可实现对管状物体的紧固;
12、所述管状物体的表面可以通过套装不同硬度材料的防撞柱来模拟关节模组在辐照环境下的硬碰撞测试和软碰撞测试。
13、更近一步地,所述参数管理模块在机器人关节模组辐照考核测试时能够新建或删除测试项目,并确定输入关节模组的类型以及末端执行器;
14、所述参数管理模块用于输入多关节组成关节链的装配组合情况和关节模组的等效负载,输入关节模组中关节电机的相关额定参数、伺服系统的额定参数和相关参数的失效阈值。
15、更近一步地,所述状态监控模块包括远程控制模块和参数数据采集模块;
16、其中,远程控制模块用于远程设定被测关节模组的控制工作模式,包括位置模式、恒速模式和恒矩模式;
17、电源供电和信号经过电缆线使带电辐照测试组按照设定的模式接受辐照测试考核;
18、所述参数数据采集模块包含低压电源数据采集、伺服驱动数据采集、传感感知数据采集、mcu和通讯数据采集,用于同时实时检测并可视化显示关节模组伺服综合电子电路中四大关键模块的参数;
19、所述低压电源数据采集、所述伺服驱动数据采集、所述传感感知数据采集和所述mcu与通讯数据采集,分别采集关节模组伺服综合电子电路的辐射测试参数;所述关节模组伺服综合电子电路包括低压电源板、伺服驱动板、传感感知板和mcu控制板。
20、更近一步地,所述低压电源数据采集用于获取所述低压电源板参数,包括关节模组母线总电流、电源板温度、低压电源板输出电压、低压电源板输出电流;
21、所述伺服驱动数据采集用于获取所述伺服驱动板参数,包括伺服跟随响应时间、伺服控制信号、关节电机三相电流、关节电机实际转速、扭矩、实际绝对位置、当前实际效率、机械效率、伺服驱动板温度;
22、所述传感感知数据采集用于获取所述传感感知板参数,包括双编码器数据、旋转硬解码数据、旋变软解码数据、关节模组力/力矩、霍尔传感器数据、传感器感知板温度;
23、所述mcu与通讯数据采集用于获取所述mcu控制板参数,包括互补pwm驱动信号和报文收发数据。
24、更近一步地,所述参数性能分析模块,根据所述待测关节模组的伺服系统额定参数和失效阈值,结合状态监控模块中实时检测到的数据进行自动分析,获取所述待测关节模组的伺服系统中核心电路模块和元器件发生参数失效、功能失效和灾难性失效时的累计总剂量,获得所述待测关节模组的累计总剂量,并形成关节模组的抗辐射加固评估试验报表。
25、更近一步地,所述数据存储模块能够选择数据文件保存路径,用于对机器人关节模组辐照考核测试时产生的数据进行历史数据查询、实时数据记录、曲线图数据的在线回放与暂停、查询结果导出。
26、更近一步地,所述辐射环境下机器人关节模组测控平台测试时数据传输具有冗余性,包括数据主传输通道和辅助数据传输通道,可以实时数据灾害备份;
27、其中所述数据主传输通道进一步可描述为:机器人关节模组带电辐照参数数据组成的第一路混合信号经过铅砖屏蔽的数据采集卡、差分转接芯片、屏蔽双绞线向人员测试室进行传递,传输到人员测试室的机器人关节模组测控软件平台中,实现数据分析与保存。
28、更近一步地,所述辅助数据传输通道进一步可描述为:机器人关节模组带电辐照参数数据同时经过另外一个插座接口,产生第二路信号,第二路信号经过数字转换器转换成数字信号后,数字信号经过u盘转接电路传输到u盘存储器,完成对机器人关节模组带电辐照参数读写到u盘中进行灾害安全备份,所述数字转换器、所述u盘转接电路和所述u盘存储器均采用铅砖材料屏蔽放射源的射线。
29、本发明达到的有益效果是:
30、(1)在本发明中,测控平台能够高效完成辐射环境下机器人单关节模组的参数管理、状态监控、辐射参数分析和数据结果存储。同样,该测控平台也能高效完成辐射环境下多关节模组多连杆组成的关节链空间对拖,满足对各个关节模组运动学和动力学输出的动态跟随性能进行考核测试,以及对关节链上各个关节模组的参数管理、状态监控、辐射参数分析和数据结果存储。
31、(2)在本发明中,机器人关节模组测控平台在回旋型辐照中心具有一定的通用性、具有快速移动性优点,在辐射环境下机器人关节模组测控平台可以满足相关操作规范中的规定2小时之内完成,可以避免关节模组伺服综合电子电路发生退火效应,此外,该测控平台在辐照测试时,数据传输具有冗余性,有数据主传输通道和辅助数据传输通道,可以实时数据灾害备份。
32、(3)在本发明中,机器人关节模组测控平台,可快速设置对照组测试试验,其中,带电测试非辐照组作为原始数据,其它的两组测试参数都与带电测试非辐照组进行试验环境和结果对比,保证了关节模组抗辐射加固评估试验报表的严谨性和正确性。其中,带电测试非辐照组可以在人员测试室内完成常规测控,非带电辐照测试组可以放置在辐射环境平台中的货架上,用于测试冷冗余非带电情况下的辐射效应。带电辐照测试组一起与测控平台放置在辐照中心剂量点/率某点处,用辐射剂量仪进行剂量标定,用于测试与考核带电情况下的辐射效应。
- 还没有人留言评论。精彩留言会获得点赞!