一种晶圆搬运机械臂控制系统及方法与流程
本发明属于涉及晶圆搬运机械臂智能控制技术,具体是一种晶圆搬运机械臂控制系统及方法。
背景技术:
1、晶圆搬运机械臂是半导体制造流程中重要的设备之一,用于将晶圆从一个位置搬移到另一个位置。
2、目前,传统的晶圆搬运机械臂负压控制方法存在一些问题。例如,由于机械臂在运动过程中速度变化较大,传统方法中固定的负压值无法满足不同运动速度下晶圆的需求,可能导致负压值过小或过大,使得晶圆从机械臂上脱落或者被挤压变形。
3、对晶圆搬运机械臂实时进行负压控制需要耗费巨大的计算资源和时间,难以达到实时得到合适负压的效果。
4、申请公开号cn108555936a的中国专利公开了一种晶圆搬运机械手臂,包括主体和搬运装置,搬运装置包括分别设置在所述滑杆两端的连接基座和连接底座,所述连接基座用于安装所述搬运头,所述连接底座上还设有用于驱动所述搬运装置升降的升降机构。减小了搬运装置晃动的可能,增加了晶圆的加工精度;但是并未考虑到晶圆搬运机械臂对晶圆进行吸附的吸附力控制的问题;
5、为此,本发明提出一种晶圆搬运机械臂控制系统及方法。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种晶圆搬运机械臂控制系统及方法,该一种晶圆搬运机械臂控制系统及方法避免了在晶圆搬运机械臂移动过程中,因速度变化导致晶圆因负压过小脱落或因负压太大被挤压变形。
2、为实现上述目的,根据本发明的实施例2提出一种晶圆搬运机械臂控制方法,包括以下步骤:
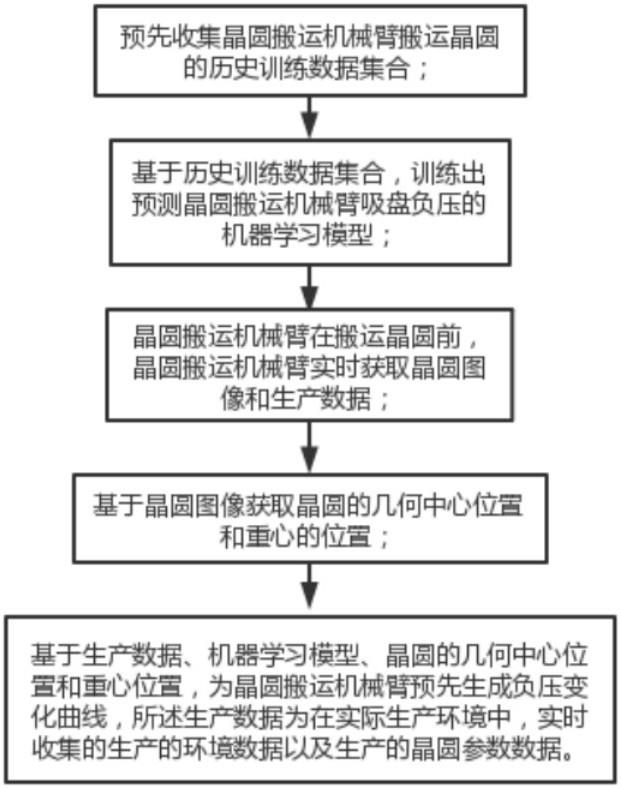
3、预先收集晶圆搬运机械臂搬运晶圆的历史训练数据集合;
4、基于历史训练数据集合,训练出预测晶圆搬运机械臂吸盘负压的机器学习模型;
5、在实际生产环境中,晶圆搬运机械臂在搬运晶圆前,实时获取晶圆图像和生产数据;
6、在晶圆搬运机械臂的控制后台,基于晶圆图像获取晶圆的几何中心位置和重心的位置;
7、基于生产数据、机器学习模型、晶圆的几何中心位置和重心位置,为晶圆搬运机械臂预先生成负压变化曲线;
8、所述历史训练数据集合在实验环境中收集,通过主动控制环境数据、晶圆参数数据、机械臂移动数据以及机械臂位置数据,以获得在实验环境中不同数据组合下的训练数据;每一次数据组合作为一组训练数据;
9、其中,所述历史训练数据集合包括若干组训练数据,每组训练数据包括特征数据以及标签数据;其中,特征数据包括环境数据、晶圆参数数据、机械臂移动数据以及机械臂位置数据;
10、其中,所述环境数据为收集每组训练数据时的环境温度数据以及环境湿度数据;
11、其中,所述晶圆参数数据包括收集每组训练数据时,使用晶圆搬运机械臂搬运的晶圆的尺寸和重量;
12、其中,所述机械臂移动数据包括收集每组训练数据时,晶圆搬运机械臂搬运晶圆过程中,晶圆搬运机械臂的实时速度和实时加速度;
13、其中,所述机械臂位置数据为收集每组训练数据时,晶圆搬运机械臂吸盘吸附晶圆的位置参数;
14、将每组训练数据标记为,将第组训练数据中,晶圆搬运机械臂吸盘吸附晶圆的位置参数标记为,其中位置参数的计算公式为;其中,为晶圆搬运机械臂吸盘吸附晶圆的位置与晶圆几何中心位置的距离,为晶圆搬运机械臂吸盘吸附晶圆的位置与晶圆重心位置的距离;其中,的每组训练数据中,晶圆几何中心位置以及重心位置预先通过物理手段进行测量;
15、所述标签数据为收集每组训练数据时,晶圆搬运机械臂吸盘吸附晶圆的负压值;吸盘的负压值通过使用安装在吸盘上的压力传感器,实时感应吸盘与晶圆之间的负压大小;
16、基于历史训练数据集合,训练出预测负压值的机器学习模型的方式为:
17、将每组训练数据中的特征数据转化为特征向量,以每组特征向量为机器学习模型的输入,该机器学习模型以对每组特征数据预测的负压值作为输出,以每组特征数据对应标签数据中的负压值作为预测目标,以最小化所有特征向量的预测准确度之和作为训练目标;其中,预测准确度的计算公式为,其中为预测准确度,为第i组特征向量对应的预测的负压值,为第i组标签数据中的负压值;对机器学习模型进行训练,直至预测准确度之和达到收敛时停止训练;
18、在晶圆搬运机械臂实际搬运晶圆前,实时获取晶圆图像的方式为:
19、晶圆搬运机械臂根据预先在控制后台中设置的移动路线,移动至预设的晶圆搬运起始点,并使用自带的图像捕获设备捕获待搬运晶圆的晶圆图像;
20、所述生产数据为在实际生产环境中,实时收集的生产的环境数据以及生产的晶圆参数数据;
21、基于晶圆图像获取晶圆的几何中心位置和重心的位置的方式为:
22、晶圆搬运机械臂的控制后台用使用canny边缘检测算法提取晶圆图像中晶圆的边缘点;
23、计算所有边缘点坐标的平均值,得到晶圆的几何中心位置;
24、基于晶圆的几何中心,得到晶圆的重心位置;
25、得到晶圆的几何中心的方式为:
26、以晶圆图像中任意一个角点的像素点为坐标原点,以一个像素点的尺寸作为单位距离,建立平面xy直角坐标系,晶圆图像中每个像素点的x轴坐标即为该像素点与x轴在垂直方向上的相隔的像素点数量,y轴坐标即为该像素点与y轴在垂直方向上的相隔的像素点数量,边缘点的坐标即为边缘点所对应的像素点的坐标;
27、,
28、;
29、其中,(,)是第j个边缘点的坐标,是边缘点的总数,;和分别是晶圆的几何中心的x轴和y轴坐标;
30、基于晶圆的几何中心,得到晶圆的重心位置的方式为:
31、将边缘点使用霍夫变换方法获得晶圆半径;
32、将晶圆图像按几何中心和晶圆半径进行二值化处理;
33、进行二值化处理的方式为将晶圆图像中的像素点进行遍历,若像素点距离几何中心的距离大于晶圆半径,将该像素点标记为0,若像素点距离几何中心的距离小于或等于晶圆半径,将该像素点标记为1;
34、晶圆的重心位置的x轴坐标为所有标记为1的像素点的x轴坐标的平均值,晶圆的重心位置的y轴坐标为所有标记为1的像素点的y轴坐标的平均值;该重心的计算方式保证了在晶圆不是标准圆形的情况下,依然可以准确计算出晶圆的重心位置;
35、为晶圆搬运机械臂预先生成负压变化曲线的方式为:
36、晶圆搬运机械臂的控制后台计算出晶圆的几何中心位置和重心位置的中点位置,并控制晶圆搬运机械臂的吸盘向中点位置吸附;晶圆搬运机械臂的图像捕获设备捕获晶圆图像,控制后台基于晶圆图像获得吸盘吸附晶圆的生产的位置参数;
37、控制后台预先为晶圆搬运机械臂生成搬运晶圆的行动轨迹,并基于行动轨迹为晶圆搬运机械臂生成实时的移动速度和移动加速度,基于实时移动速度和实时移动加速度,生成移动速度时间曲线和移动加速度时间曲线;
38、在移动加速度时间曲线中移动加速度为0时,保持生产的负压值不变;在移动加速度时间曲线中移动加速度不为0时,将该时刻下,生产的环境数据、生产的晶圆参数数据、生产的位置参数、实时移动速度和实时移动加速度作为生产的特征数据,并将生产的特征数据转化为特征向量,将生产的特征向量输入至机器学习模型中,获得该时刻的预测的负压值,当前时刻的生产的负压值为该预测的负压值加上预设的大于0的调剂系数;将生产的负压值按时间顺序连接形成负压变化曲线。
39、根据本发明的实施例1提出一种晶圆搬运机械臂控制系统,包括历史吸附数据收集模块、负压预测模型训练模块、晶圆生产数据收集模块、吸附点分析模块以及机械臂控制模块;其中,各个模块之间通过电气和/或无线网络方式连接;
40、所述历史吸附数据收集模块用于预先收集晶圆搬运机械臂搬运晶圆的历史训练数据集合,并将历史训练数据集合发送至负压预测模型训练模块;
41、所述负压预测模型训练模块用于基于历史训练数据集合,训练出预测晶圆搬运机械臂吸盘负压的机器学习模型,并将机器学习模型发送至机械臂控制模块;
42、所述晶圆生产数据收集模块用于在实际生产环境中,晶圆搬运机械臂在搬运晶圆前,实时获取晶圆图像和生产数据,并将晶圆图像发送至吸附点分析模块,将生产数据发送至机械臂控制模块;
43、所述吸附点分析模块用于在晶圆搬运机械臂的控制后台,基于晶圆图像获取晶圆的几何中心位置和重心的位置,并将晶圆的几何中心位置和重心的位置发送至机械臂控制模块;
44、所述机械臂控制模块主要用于基于生产数据、机器学习模型、晶圆的几何中心位置和重心位置,为晶圆搬运机械臂预先生成负压变化曲线;所述生产数据为在实际生产环境中,实时收集的生产的环境数据以及生产的晶圆参数数据。
45、与现有技术相比,本发明的有益效果是:
46、(1)本发明基于图像处理技术,根据晶圆图像分析晶圆的几何中心位置和重心位置,再基于几何中心位置和重心位置,获得晶圆搬运机械臂的吸盘的吸附位置,保证了在晶圆不是标准圆形的情况下,依然找到合适的晶圆吸附位置;
47、(2)本发明预先基于历史训练数据集合,训练出预测晶圆搬运机械臂吸盘负压的机器学习模型,在实际生产环境中,基于生产数据、机器学习模型、晶圆的几何位置和重心位置,为晶圆搬运机械臂预先生成负压变化曲线,通过预先规划出负压变化曲线,保证在机械臂移动速度发生变化时,智能调控吸附晶圆的负压值大小,避免晶圆因负压过小脱落或因负压太大被挤压变形。
- 还没有人留言评论。精彩留言会获得点赞!