一种用于变胞机器人重构的稳定性控制方法
本发明属于机器人稳定性控制的,具体的是一种用于变胞机器人重构过程中的稳定性控制方法。
背景技术:
1、可移动式机器人是目前机器人领域的研究热点之一,其主要涵盖了机械结构、非线性系统动力学、传感器技术、计算机技术、电机控制技术以及人工智能等相关学科,是国家科技实力和发展水平的重要体现。目前应用范围较广的可移动式机器人主要包括:轮驱动类车辆式、迈步行走式、履带驱动式。但上述三类机器人在运动模式上均有其各自的优点和缺陷,其中轮驱动类车辆式机器人最为常见,其主要依靠类似车辆的驱动轮进行移动,移动速度快但越障能力差;迈步行走式机器人采用迈步、跑步的移动方式,能够适应复杂地形但结构复杂、移动速度缓慢;履带驱动式机器人具有较强的越障能力,但能耗较高,续航能力较差。因此仅具有单一运动模式的移动机器人无法同时具备在铺装结构路面快速移动、崎岖山地越障行走以及较高续航能力等综合性能。另外传统应用于机器人行走、重构等各种动作时的稳定性控制方法大多是采用基于机器人踝关节或髋关节的运动调整策略,此类方法是将机器人简化成为一个三维倒立摆模型,通过踝关节或髋关节的角度调整即可实现机器人的姿态控制,从而提升机器人的稳定性。但由于机器人是一个多自由度的,强耦合的变结构动力学系统,其控制系统的建模过程比较复杂,并且在行走或重构等过程中机器人踝关节或髋关节还需要完成自身的运动规律,能够提供的稳定性控制效果比较有限。
技术实现思路
1、本发明是为了解决上述现有技术存在的不足之处,提供一种用于变胞机器人重构的稳定性控制方法,以期能实现整车实际zmp位置趋近于理论参考位置,从而能提高系统重构时的稳定性。
2、本发明为达到上述发明目的,采用如下技术方案:
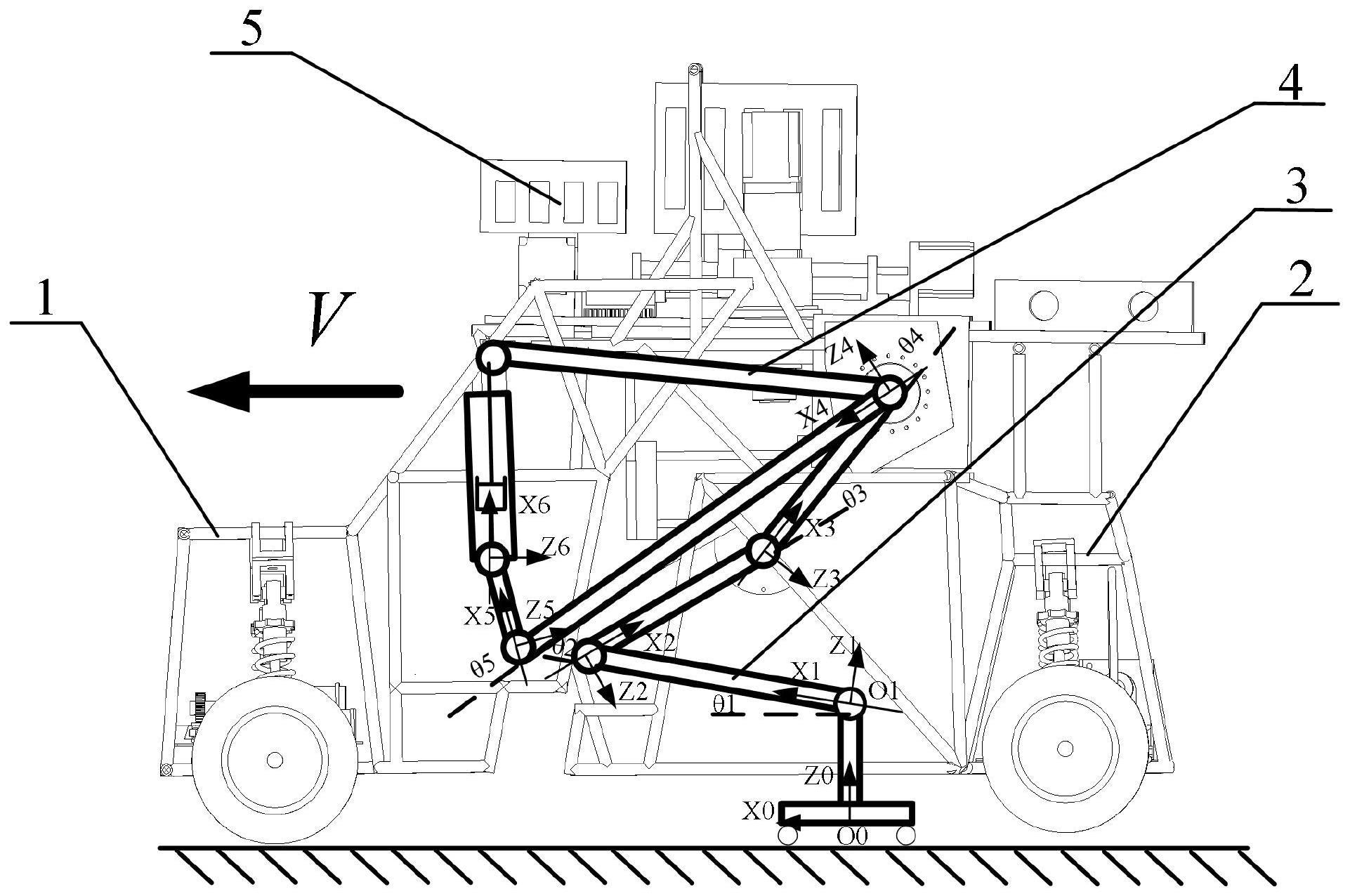
3、本发明一种用于变胞机器人重构的稳定性控制方法的特点在于,所述变胞机器人包括:前、后车身、折叠腿、举升机构、调质心机构以及用于稳定性控制的上层模糊pid控制器和下层滑模控制器;其中,前车身上布置有一对轮毂电机和一对麦弗逊悬架;后车身的顶板上布置有所述折叠腿、调质心机构以及举升机构,并在后车身的下方也布置有一对轮毂电机、一对麦弗逊悬架以及制动装置;所述举升机构通过举升电机和电动推杆分别进行旋转运动和平移运动,所述调质心机构中设置有沿竖直和水平方向上移动的调质心滑块;所述稳定性控制方法是按如下步骤进行:
4、步骤1:生成变胞机器人重构过程中各关节的期望轨迹;
5、步骤1.1:建立变胞机器人重构的运动学模型;
6、步骤1.2:根据拉格朗日动力学理论,利用式(7)建立变胞机器人重构的动力学模型;
7、
8、式(7)中:q表示为变胞机器人的一组广义坐标,且q=[q1 q2 q3 qb q5 q6]t,其中,q1,q2,q3,q5分别为折叠腿上的踝、膝、髋以及举升机构的举升关节的转动角度,qb,q6为所述调质心滑块和所述电动推杆的平动距离;分别为q的一阶及二阶导数;m(q)为质量矩阵项;为科里奥项;g(q)为重力项;τ=[τ1 τ2 τ3 τb τ5 τ6]t为变胞机器人各关节的驱动力矩,其中,τ1为踝关节的驱动力矩;τ2为膝关节的驱动力矩;τ3为髋关节的驱动力矩;τb为所述调质心滑块的驱动力矩;τ5为举升关节的驱动力矩;τ6为电动推杆的驱动力矩;
9、步骤1.3:采用式(8)所示的五次多项式拟合方法构建变胞机器人的踝关节、膝关节、髋关节、举升关节中任意第k个关节在t时刻的期望轨迹qk(t);
10、
11、式(8)中,k=1,2,3,5分别表示踝关节,膝关节,髋关节和举升关节,δqk为第k个关节完成重构所需转动的角度,qk0为第k个关节的初始转角,δt为重构时间;
12、步骤1.4:以变胞机器人的足支撑域中心点作为期望零力矩点位置,将变胞机器人在t时刻的实际零力矩点位置zmp'(t)与期望零力矩点位置zmp(t)的偏差zmpe以及偏差的变化率zmpec输入至上层模糊pid控制器中,计算并输出调质心滑块在t时刻的期望轨迹qb(t);
13、步骤2:计算变胞机器人在t时刻第k个关节的实际轨迹q'k(t)与期望轨迹qk(t)的偏差qe_k(t),以及调质心滑块的实际轨迹q'b(t)与期望轨迹qb(t)的偏差qe_b(t);其中,k=1,2,3,5;
14、步骤3:将两个偏差输入下层滑模控制器中,用于计算各关节重构过程所需的力矩τk以及用于调整变胞机器人调质心滑块运动所需的力矩τb;
15、步骤3.1:利用式(9)构建切换面函数s;
16、
17、式(9)中,c表示对角常系数矩阵,e为跟踪误差,且e=[qe_k(t),qe_b(t)],为e的导数;
18、步骤3.2:利用式(10)构建趋近率为指数趋近律
19、
20、式(10)中,ε和δ表示两个对角常系数矩阵,且ε=diag[ε1,ε2,…,εi,…,ε6],εi表示对角常系数矩阵ε中第i个对角系数,且εi>0;δ=diag[δ1,δ2,…,δi,…,δ6],δi表示对角常系数矩阵δ中第i个对角系数,且δi>0;sgn(·)表示符号函数,其中,i=1,2,…,6;
21、步骤3.2:对式(9)进行求导,并将所述动力学模型代入式(9),从而利用式(11)得到滑模控制器的输出力矩τ;
22、
23、式(11)中,表示变胞机器人第k个关节和调质心滑块在t时刻的期望轨迹;
24、步骤4:将τk和τb代入式(7)中得到各关节的实际轨迹q'k(t)以及调质心滑块的实际轨迹q′b(t);
25、步骤5:将q'k(t)和q'b(t)代入至变胞机器人中各种构件的质心计算公式,得到各种构件的质心位置cj=(xj,yj,zj)t,其中,j=1,2,…,6分别代表6种构件,依次包括:变胞机器人小腿、大腿、后车身、举升杆下杆、前车身、电动推杆;从而利用式(12)得到变胞机器人在t时刻的实际零力矩点位置zmp'(t),并输入至模糊pid控制器以实现对变胞机器人稳定性的上层闭环控制;
26、
27、式(12)中,mj为变胞机器人各构件的质量,xj、zj分别为第j种构件的质心在x、z坐标轴方向上的坐标值,分别为构件j的质心在x、z坐标轴方向上的加速度,g为重力加速度。
28、本发明一种电子设备,包括存储器以及处理器的特点在于,所述存储器用于存储支持处理器执行所述稳定性控制方法的程序,所述处理器被配置为用于执行所述存储器中存储的程序。
29、本发明一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序的特点在于,所述计算机程序被处理器运行时执行所述稳定性控制方法的步骤。
30、与现有技术相比,本发明的有益效果在于:
31、1.本发明为了避免变胞机器人重构时关节运动出现冲击,预先设定了机器人起始与终止时刻的关节角度值,并基于五次多项式规划设计了变胞机器人重构时各关节角度qk(k=1,2,3,5)关于时间t的函数,通过得到机器人关节动作序列并应用于机器人机体,从而实现了机器人重构时关节运动的平顺性。
32、2.本发明以安装在变胞机器人车身上的调质心机构为控制对象,通过采用分层控制方法实现系统重构的稳定性。其中上层模糊pid控制器作为调质心机构中滑块的位置控制器,该控制器主要是根据实际zmp与理想zmp的偏差来实时改变调整机构中滑块的位置,使其满足zmp点一直在支撑区域中心附近,而下层滑模控制器则是用于各关节以及调质心滑块对期望轨迹的跟踪控制,最终实现了整体系统的闭环反馈控制。
33、3.通过本发明的方法,当变胞机器人需要进一步进行行走、转向及攀登时,此时只需要腿部关节完成行走、转向及攀登动作,而系统的稳定性同样可以由调质心机构进行控制。由于两种功能分别由两种执行机构完成,这样不仅可以提高机器人行走、转向及爬坡的稳定性,而且也提高了机器人行走、转向及爬坡的快速灵活性。
- 还没有人留言评论。精彩留言会获得点赞!