软体机械手控制方法、装置、软体机械手及电子设备
本发明涉及机械手控制,特别是涉及一种软体机械手控制方法、装置、软体机械手及电子设备。
背景技术:
1、机械手能够模仿人手和手臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具,是在机械化、自动化生产过程中发展起来的一种新型装置。在现代生产过程中,机械手被广泛应用于自动生产线中,机械人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,促进了机械手的发展,使得机械手能够更好地实现与机械化以及自动化的有机结合。机械手虽然还不如人手那样灵活,但它具有能不断重复工作和劳动、不知疲劳、不怕危险以及抓举重物的力量比人手大的特点。因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用。
2、目前,普遍应用的机械手多为刚性机械手,传统的刚性机械手的功能和形态已经被广泛应用于人类社会生产中。这些刚性机械手主要由金属材料制成,往往负责工业现场中结构性、重复性等工作程序。然而,现代的机械手正在向着高定位精度、高灵活性以及高人机交互的方向发展。由于刚性机械手本身材料的刚性过大,对于一些精细或是易碎的物品较难实现可靠的抓取。
3、因此,传统的刚性机械手较难对易损易碎物体实现可靠且稳定的抓取。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够对易损易碎物体实现可靠且稳定的抓取的软体机械手控制方法、装置、软体机械手及电子设备。
2、本发明提供了一种软体机械手控制方法,所述方法包括:
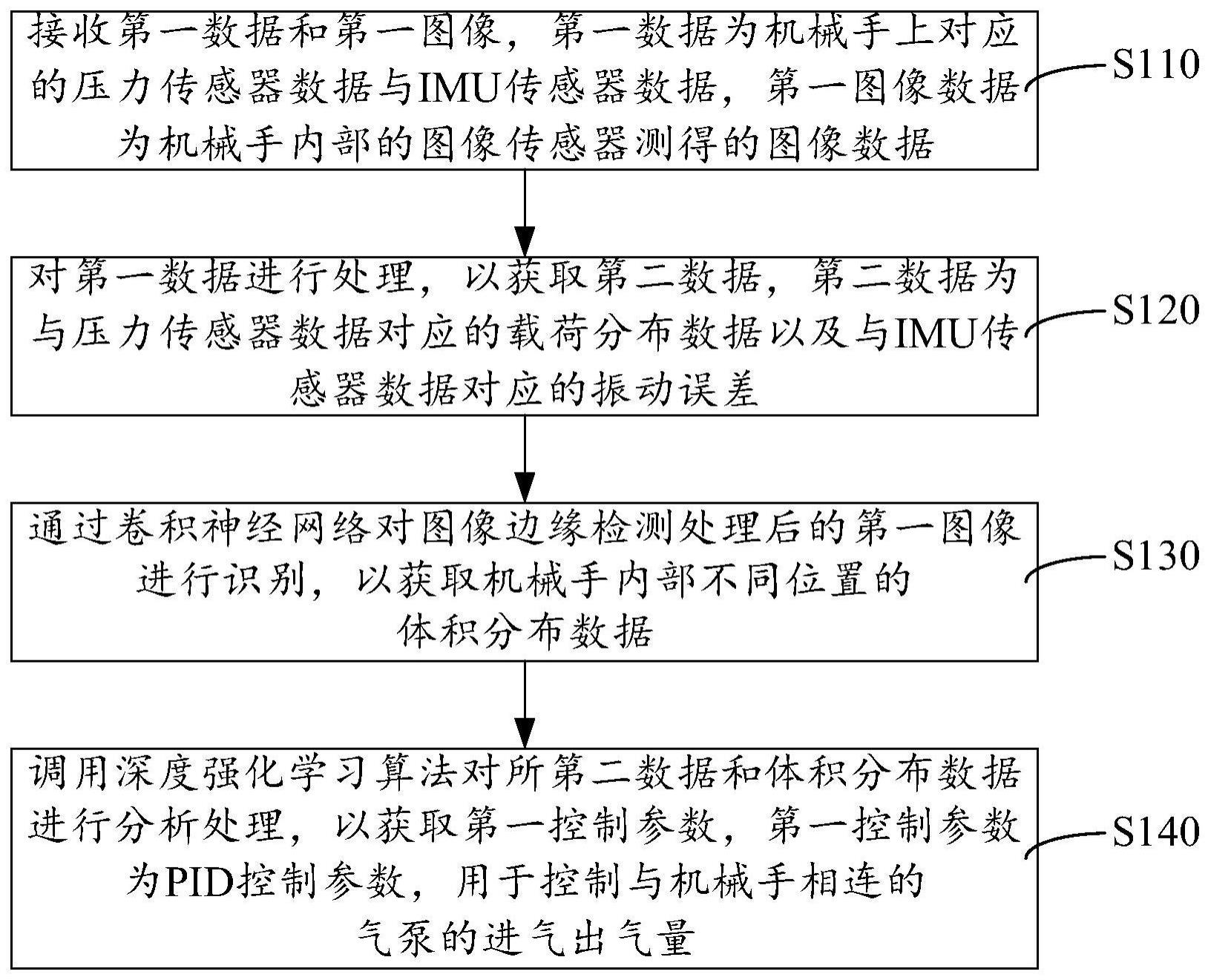
3、接收第一数据和第一图像,所述第一数据为机械手上对应的压力传感器数据与imu传感器数据,所述第一图像为所述机械手内部的图像传感器测得的图像数据;
4、对所述第一数据进行处理,以获取第二数据,所述第二数据为与所述压力传感器数据对应的载荷分布数据以及与所述imu传感器数据对应的振动误差;
5、通过卷积神经网络对图像边缘检测处理后的第一图像进行识别,以获取所述机械手内部不同位置的体积分布数据;
6、调用深度强化学习算法对所述第二数据和体积分布数据进行分析处理,以获取第一控制参数,所述第一控制参数为pid控制参数,用于控制与所述机械手相连的气泵的出气量。
7、在其中一个实施例中,所述对所述第一数据进行处理,以获取第二数据,之前还包括:
8、基于所述imu传感器数据,获取第一振动信号,所述第一振动信号为被所述机械手抓握的被抓物体的振动信号;
9、基于所述第一振动信号,获取与所述振动误差对应的损失函数,所述损失函数用于描述对所述第一振动效果的抑制效果。
10、在其中一个实施例中,所述方法还包括:
11、基于所述第一数据和第一图像,获取被抓物体的第一状态,所述第一状态为所述机械手的当前状态;
12、当所述被抓物体处于第一状态时且对应的损失函数的值超过第一阈值时,调用所述卷积神经网络对所述第一状态进行拟合,以获取第一行为,所述第一行为为所述机械手在第一状态下损失函数超过第一阈值时的最佳行为;
13、其中,所述第一行为用于调大所述第一控制参数。
14、在其中一个实施例中,所述方法还包括:
15、当所述被抓物体处于第一状态时且对应的损失函数的值低于第二阈值时,调用所述卷积神经网络对所述第一状态进行拟合,以获取第二行为,所述第二行为为所述机械手在第一状态下损失函数低于第二阈值时的最佳行为;
16、其中,所述第二行为用于调小所述第一控制参数。
17、在其中一个实施例中,所述通过卷积神经网络对图像边缘检测处理后的第一图像进行识别,以获取所述机械手内部不同位置的体积分布数据,之前还包括:
18、获取机械手抓握运动前的图像数据和抓握运动后的图像数据;
19、对所述机械手抓握运动前的图像数据和抓握运动后的图像数据进行边缘检测,以获取边缘检测后的待识别图像。
20、在其中一个实施例中,所述通过卷积神经网络对图像边缘检测处理后的第一图像进行识别,以获取所述机械手内部不同位置的体积分布数据,包括:
21、调用所述卷积神经网络对所述待识别图像进行识别,以获取所述机械手抓握运动前后的体积分布数据。
22、在其中一个实施例中,所述调用深度强化学习算法对所述第二数据和体积分布数据进行分析处理,之后包括:
23、调用pid算法对深度强化学习算法的分析处理结果进行计算,以获取脉冲宽度调制参数;
24、通过传输控制协议将所述脉冲宽度调制参数发送至与所述机械手电连接的下位机,以控制所述机械手进行抓握运动。
25、本发明还提供了一种软体机械手控制装置,所述装置包括:
26、数据接收模块,用于接收第一数据和第一图像,所述第一数据为机械手上对应的压力传感器数据与imu传感器数据,所述第一图像为所述机械手内部的图像传感器测得的图像数据;
27、第一处理模块,用于对所述第一数据进行处理,以获取第二数据,所述第二数据为与所述压力传感器数据对应的载荷分布数据以及与所述imu传感器数据对应的振动误差;
28、图像识别模块,用于通过卷积神经网络对图像边缘检测处理后的第一图像进行识别,以获取所述机械手内部不同位置的体积分布数据;
29、第二处理模块,用于调用深度强化学习算法对所述第二数据和体积分布数据进行分析处理,以获取第一控制参数,所述第一控制参数为pid控制参数,用于控制与所述机械手相连的气泵的出气量。
30、本发明还提供了一种软体机械手,通过上述任一种所述的软体机械手控制方法控制,包括:
31、机械手本体,由软体手指、支撑结构以及气驱动管组成,所述支撑结构用于支撑固定多个所述软体手指,所述气驱动管与所述软体手指相连,并通过进气和出气控制所述软体手指伸直和弯曲;
32、下位机,与所述机械手本体电连接,用于接收来自机械手本体的传感器数据以及通过控制所述气驱动管的进气和出气直接控制所述机械手本体的抓握运动;
33、上位机,与所述下位机电连接,用于通过传输控制协议接收来自所述下位机的传感器数据并对所述传感器数据进行处理,以获取用于控制所述机械手本体抓握运动的控制参数,并通过传输控制协议将所述控制参数发送至所述下位机。
34、本发明还提供了一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现如上述任一种所述的软体机械手控制方法。
35、上述软体机械手控制方法、装置、软体机械手及电子设备,通过接收来自软体机械手上的压力传感器数据、imu传感器数据以及软体机械手内部的图像数据,并对压力传感器数据和imu传感器数据进行转化处理,来获取与压力传感器数据相对应的载荷分布数据以及与imu传感器数据对应的振动误差。随后,通过卷积神经网络对软体机械手内部的图像边缘检测处理后的图像数据进行识别,以获取机械手内部不同位置的体积分布数据。最后,调用深度强化学习算法对软体机械手内的载荷分布数据、振动误差以及体积分布数据进行综合分析处理,得到用于控制与软体机械手相连的气泵的出气量的pid控制参数,以控制软体机械手的抓握运动。该方法将软体机械手与压力传感器、图像传感器以及imu传感器进行结合,实现对软体机械手运动状态的综合监测,并通过深度强化学习以及pid控制参数对机械手的抓握运动进行控制,使得机械手在不同状态下都能够得到灵活的抓握调整,避免了抓握运动中抓握力道的剧烈变化以及抓握过程中的振动,从而实现了对易损易碎物体可靠且稳定的抓取。
- 还没有人留言评论。精彩留言会获得点赞!