具有补偿关节力矩的外骨骼串联弹性驱动装置及测量方法
本发明涉及外骨骼关节领域,特别涉及一种具有补偿关节力矩的外骨骼串联弹性驱动装置及测量方法。
背景技术:
1、近几年,外骨骼是医疗康复领域的研究热门方向,在智能机器人技术的不断发展的时代背景下,国内外机构开始着手于使用康复外骨骼机器人来逐渐替代康复医师,不仅可以为患者提供更为可靠方便的恢复性训练方案,还能有效减低治疗成本。外骨骼机器人能够通过在人体外部提供一定助力的方式使穿戴者实现康复训练。外骨骼关节所连接的驱动器作为外骨骼的动力源机构,需要达到稳定性好、安全性高、输出力和速度可精确控制以及防止对穿戴者造成二次伤害等要求。
2、但是目前所开发用于外骨骼关节的串联弹性驱动器大多采用旋转型弹性元件或者采用伸缩杆型结构,其串联弹性驱动器普遍尺寸及质量较大,增加了外骨骼机器人的电能消耗,且不便于穿戴。
3、除此之外,目前所开发用于外骨骼关节的串联弹性驱动器大多都难以精确计算输出速度和力,对患者恢复程度难以量化计算。因此,本发明提出一种用于测量并补偿关节力矩的外骨骼串联弹性驱动装置,从而实现对患者不同阶段不同程度的康复疗程实现精确控制。
技术实现思路
1、针对现有技术存在的问题,本发明提供一种具有补偿关节力矩的外骨骼串联弹性驱动装置及测量方法,通过在驱动件和外骨骼关节模块之间串联弹性元件模块,同时弹性元件模块的弹性系数可以依次通过改变第一碟簧组、第二碟簧组、第三碟簧组和第四碟簧组中碟形弹性元件的数量得到,具有可控性,并通过测量驱动件的编码器与中空编码器之间的位移差和弹性元件模块的弹性系数,得到补偿力矩,再将输出力矩与理想输出力矩作差得出误差值,再通过自适应pid控制算法进行自适应调整,最终实现精确测量并补偿关节力矩,从而减轻现阶段市面上外骨骼机器人笨重、穿戴难及精确计算补偿速度和力的问题。
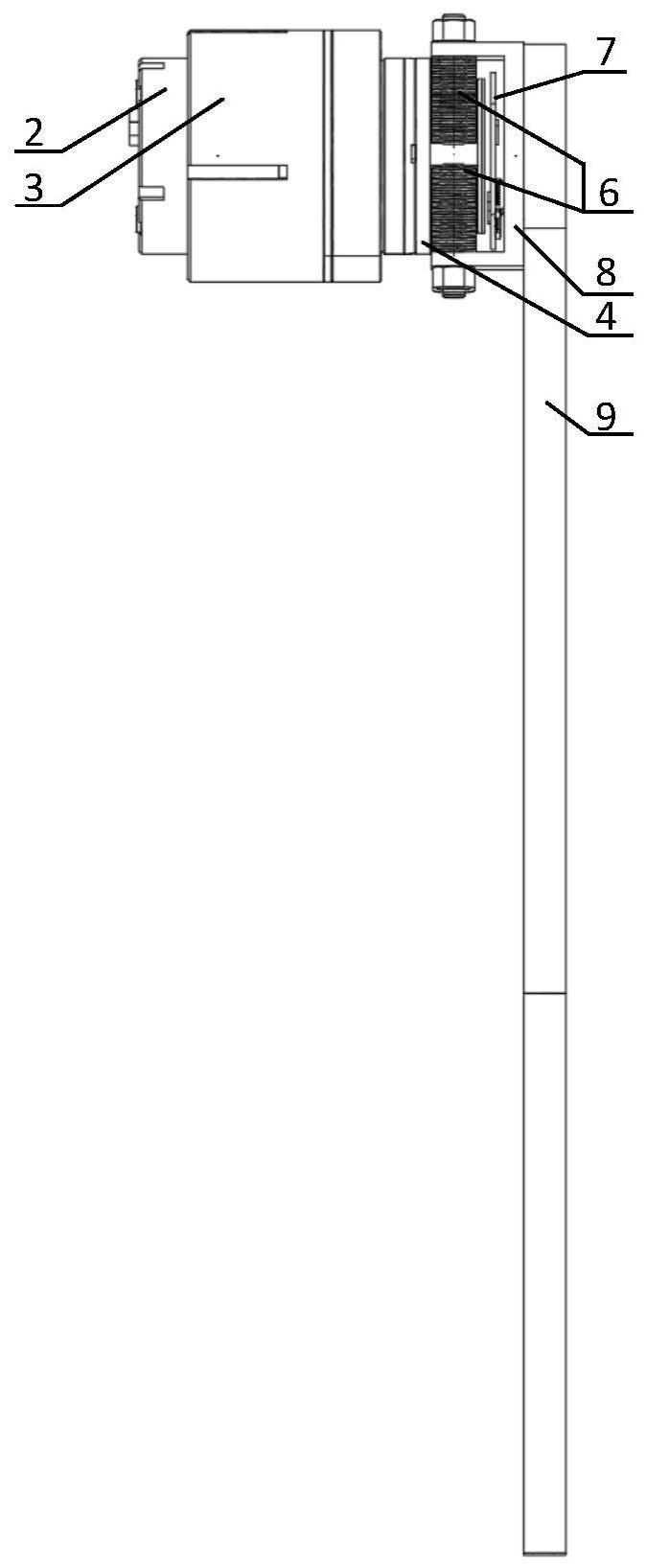
2、本发明提供了一种具有补偿关节力矩的外骨骼串联弹性驱动装置,其包括固定座模块、弹性元件模块、驱动件、编码器模块和外骨骼关节模块。所述固定座模块,其包括驱动件固定座、弹性元件固定座和外骨骼关节固定座,所述驱动件的固定端和所述驱动件固定座固定连接,所述驱动件的输出端和所述弹性元件固定座的第一安装端固定连接,所述外骨骼关节模块和所述外骨骼关节固定座的第一安装端固定连接,所述编码器模块位于所述外骨骼关节模块的内部,所述编码器模块的固定端和所述外骨骼关节固定座的第二安装端固定连接。所述弹性元件模块,其包括弹性元件固定轴、第一固定轴、第二固定轴、第一螺母、第二螺母、第三螺母、第四螺母、第一碟簧组、第二碟簧组、第三碟簧组和第四碟簧组,所述第一碟簧组和所述第二碟簧组对称分布在所述第一固定轴的两端,所述第三碟簧组和所述第四碟簧组对称分布在所述第二固定轴的两端,所述弹性元件固定轴对称分布在所述第一固定轴和所述第二固定轴的两端,所述第一固定轴的两端分别穿过所述弹性元件固定轴的第一安装孔与所述第一螺母和所述第二螺母固定连接,所述第二固定轴的两端分别穿过所述弹性元件固定轴的第二安装孔与所述第三螺母和所述第四螺母固定连接,所述第一固定轴和所述第二固定轴的中部安装端分别与所述弹性元件固定座的第二安装端和第三安装端固定连接,所述外骨骼关节固定座的第三安装端和所述弹性元件固定轴的安装端固定连接。所述弹性元件模块的弹性系数依次通过改变第一碟簧组、第二碟簧组、第三碟簧组和第四碟簧组中碟形弹性元件的数量得到。
3、可优选的是,述编码器模块,由中空编码器组成,中空编码器根据其反馈值精确计算补偿力或速度。
4、可优选的是,通过测量驱动件的编码器与中空编码器之间的位移差和弹性元件模块的弹性系数,得到补偿力矩m,具体表达式如下:
5、m=(δ1-δ2)·pz′
6、其中,δ1为驱动件的编码器数值,δ2为中空编码器的数值,pz′为碟簧组变形后的总刚度。
7、可优选的是,所述驱动件的输出轴、所述弹性元件固定座、所述编码器模块的安装轴和所述外骨骼关节固定座的轴线在同一条直线上。
8、可优选的是,所述第一碟簧组、所述第二碟簧组、所述第三碟簧组和所述第四碟簧组分别由若干个结构相同的碟形弹性元件组成。
9、可优选的是,所述第一螺母和所述第二螺母对称分布在所述第一固定轴的两端,分别通过调整第一螺母和第二螺母在第一固定轴安装位置,来改善第一碟簧组和第二碟簧组的压缩量,所述第三螺母和所述第四螺母对称分布在所述第二固定轴的两端,分别通过调整第三螺母和第四螺母在第二固定轴安装位置,来改善第三碟簧组和第四碟簧组的压缩量。
10、本发明的另外一方面,提供一种具有补偿关节力矩的外骨骼串联弹性驱动装置的测量方法,其包括以下步骤:
11、s1、根据使用需求,设定理想输出力矩并计算串联弹性驱动装置的安全力矩;
12、s2、根据步骤s1得到的安全力矩,计算每个碟簧组中碟形弹性元件的个数和碟簧组变形后总刚度,具体过程为:
13、s21、计算每个碟簧组中碟形弹性元件的个数:
14、单个所述碟形弹性元件的负荷p1的表达式为:
15、
16、式中,pr为碟形弹性元件所受的静负荷,fm为碟形弹性元件的摩擦系数,n为碟簧组中碟形弹性元件的片数;
17、所述碟形弹性元件在压平时的负荷pc的表达式为:
18、
19、式中,e为碟形弹性元件的弹性模量,μ为碟形弹性元件的泊松比,t为碟形弹性元件的厚度,h0为无支撑面碟形弹性元件压平时变形量的计算值,d为碟形弹性元件的外径,k1和k4为碟形弹性元件的计算系数,pc为压平时碟形弹性元件的负荷计算值;
20、所述碟簧组的个数i的具体表达式为:
21、
22、式中,fz1为不考虑摩擦力时碟形弹性元件的变形量,f1为对应于碟形弹性元件负荷p1的变形量,i为碟簧组的组数;
23、s22、计算碟簧组变形后总刚度:
24、所述碟形弹性元件的刚度p′的具体表达式为:
25、
26、式中,e为碟形弹性元件的弹性模量,μ为碟形弹性元件的泊松比,t为碟形弹性元件的厚度,h0为无支撑面碟形弹性元件压平时变形量的计算值,d为碟形弹性元件的外径,k1和k4为碟形弹性元件的计算系数,pc为压平时碟形弹性元件的负荷计算值,f为碟形弹性元件的变形量;
27、所述碟簧组的刚度p′r的具体表达式为:
28、
29、式中,碟形弹性元件的刚度p′,fm为碟形弹性元件的摩擦系数,n为碟簧组中碟形弹性元件的片数;
30、所述碟簧组变形后的总刚度p′z的具体表达式为:
31、
32、式中,碟簧组的刚度p′r,碟簧组的个数i;
33、s3、根据驱动件的编码器与中空编码器之间的位移差和弹性元件模块的弹性系数,得出实际输出力矩,再将理想输出力矩与实际输出力矩的差值作为误差值反馈至自适应pid算法,来控制驱动件调整输出力矩,实现实际输出力矩数值与理想输出力矩相同,完成精确补偿输出关节力矩。
34、本发明与现有技术相比,具有如下优点:
35、1.本发明通过弹性元件模块中碟形弹性元件,可实现整体串联弹性驱动器尺寸及质量的减轻,减轻现阶段市面上外骨骼机器人笨重、穿戴难的问题。当用于多个外骨骼机器人关节时,本发明的弹性元件模块不仅能够实现轻量化对整体灵敏度有较大提升,还能实现多关节相互协作,完成精确以及细微的运动。
36、2.本发明通过电机上的编码器与编码器模块之间的位移差和弹性元件模块弹性系数,采用力闭环控制系统与自适应pid算法,可精确测量并补偿输出力,实现反馈精确速度与力值,从而实现监测外骨骼关节,动态调整输入输出,可实现使用者能够精准控制的效果。
37、3.本发明适用于不同种类外骨骼机器人的不同关节,具有很强的通用性及普遍性,当发生故障或损坏时,方便随时替换受损串联弹性驱动器。
- 还没有人留言评论。精彩留言会获得点赞!