一种受限机械臂固定时间自适应参数辨识、控制方法及装置
本技术涉及机器人控制,具体而言,涉及一种受限机械臂固定时间自适应参数辨识、控制方法及装置。
背景技术:
1、机械臂具有模仿人类手臂运动的功能,并可完成多种作业,是当前机器人技术领域中应用最为广泛的自动化机械装置,涉及工业制造、农业生产、医疗服务以及太空探索等诸多领域。
2、若要对机械臂进行精准操控,需实时、准确得获取机械臂各项物理参数来构建其精确的动态模型,然而,机械臂系统通常含有多个自由度,是典型的非线性、强耦合系统;此外,随着环境因素的影响和执行任务的改变,机械臂动态模型中的多个参数也会随之发生变化,这些因素均导致其动态模型难以精确获得,而使用不准确的机械臂模型将会严重影响系统控制效果。
3、因此,如何实现对机械臂模型未知参数的准确辨识、提升机械臂系统控制性能已成为当前控制领域亟需解决的问题。
技术实现思路
1、为实现对机械臂模型未知参数的准确辨识、提升机械臂系统控制性能的问题,本技术提供了一种受限机械臂固定时间自适应参数辨识、控制方法及装置。
2、本技术的实施例是这样实现的:
3、第一方面,本技术提供一种受限机械臂固定时间自适应参数辨识、控制方法,所述方法包括:
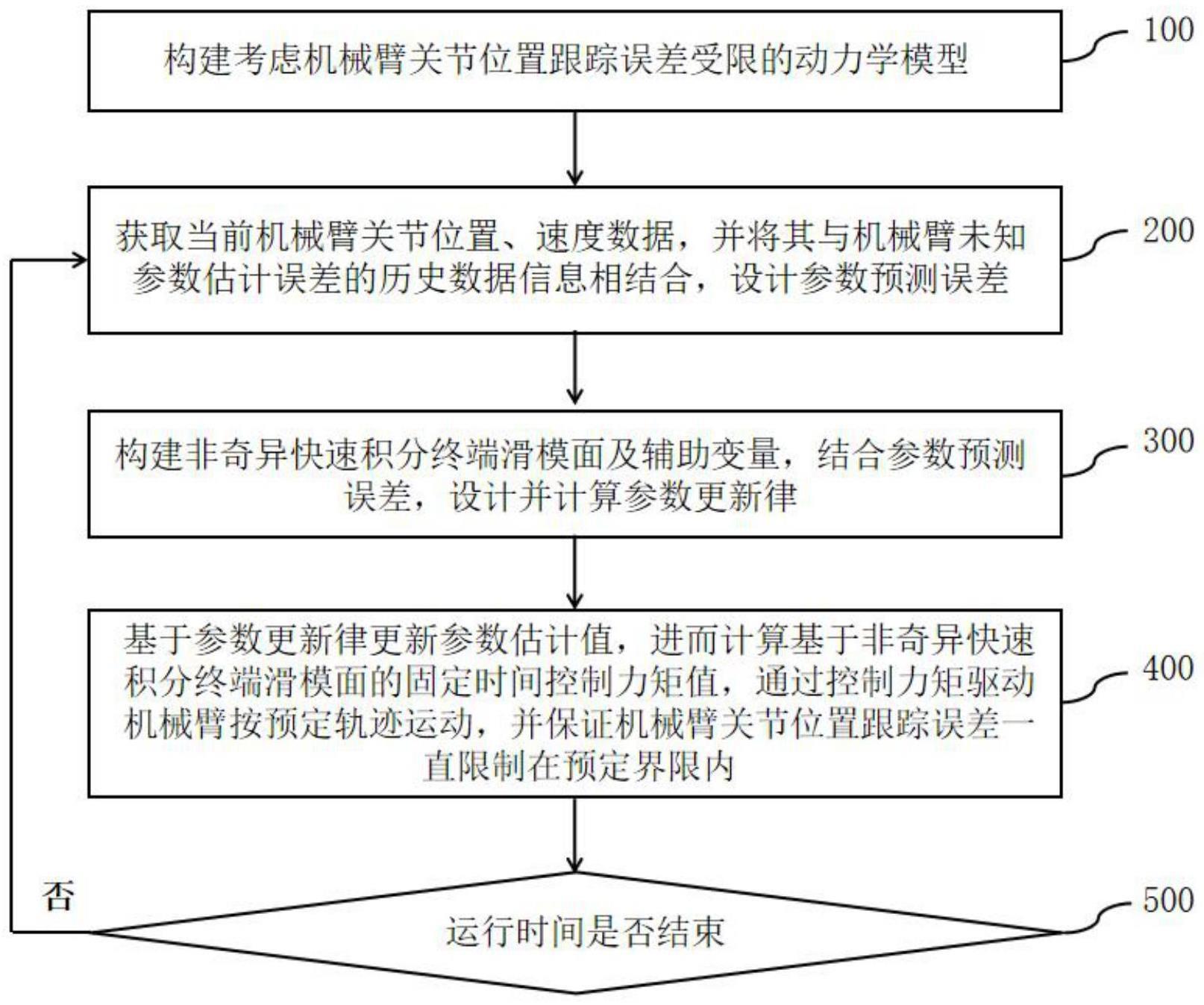
4、构建考虑机械臂关节位置跟踪误差受限的动力学模型;
5、获取当前机械臂关节的位置及速度数据,并将所述位置及速度数据与机械臂未知参数估计误差的历史数据信息相结合,设计参数预测误差;
6、构建非奇异快速积分终端滑模面及辅助变量,结合所述的参数预测误差,设计并计算参数更新律;
7、基于所述参数更新律更新参数估计值,进而计算基于非奇异快速积分终端滑模面的固定时间控制力矩值,以通过控制力矩驱动机械臂按预定轨迹运动,并保证机械臂关节位置跟踪误差一直限制在预定界限内;
8、在系统设定的时间未结束时,获取下一时间为当前时间,继续获取机械臂关节位置及速度数据,重复上述步骤。
9、在一种可能的实现方式中,所述考虑机械臂关节位置跟踪误差受限的动力学模型,通过以下步骤和方法构建:
10、建立不考虑关节位置误差受限的机械臂动力学模型;
11、其中,不考虑关节位置误差受限的机械臂动力学模型如下所示:
12、
13、式中:q(t)=[q1(t),q2(t),...qn(t)]代表n自由度机械臂关节位置向量,代表正定惯性矩阵,代表离心力与哥氏力矩阵,代表粘滞摩擦力矩,代表重力力矩,代表控制力矩,分别代表机械臂关节位置、速度和加速度;
14、设计误差转换函数;
15、其中,误差转换函数设计如下:
16、
17、式中:ei为跟踪误差e的第i个元素,i=1,2,...,n,e=q-qd,qd为机械臂关节位置期望轨迹,ki和li均为正常数;
18、设计与初始条件无关的非对称障碍函数,并对其进行求导;
19、其中,与初始条件无关的非对称障碍函数设计如下:
20、
21、式中:φai(t)和φbi(t)为时变函数,t为时间,满足φai(t)>0,φbi(t)>0,φai(0)=φbi(0)=ki;
22、对非对称障碍函数求导可得:
23、
24、其中:
25、
26、
27、将写成紧凑形式为:
28、
29、式中:
30、
31、
32、
33、将所述误差转换函数及所述与初始条件无关的非对称障碍函数的导数,代入所述不考虑关节位置误差受限的机械臂动力学模型,得到考虑关节位置跟踪误差受限的机械臂动力学模型;
34、其中,考虑关节位置跟踪误差受限的机械臂动力学模型如下:
35、
36、式中:
37、
38、
39、
40、式中:为使动力学模型线性参数化等式成立的任意辅助向量,为ξ的导数,为机械臂关节位置跟踪误差受限后对应的动态回归矩阵,为的转置,θ为机械臂未知参数向量。
41、在一种可能的实现方式中,所述参数预测误差,通过以下步骤和方法获得:
42、构建改进激励矩阵;
43、其中,改进激励矩阵构建如下:
44、
45、式中:为改进激励矩阵,φ(t)为激励矩阵,te为使区间激励条件成立的时间上边界;
46、根据所述改进激励矩阵,设计参数预测误差;
47、其中,参数预测误差设计如下:
48、
49、式中:ε(t)为参数预测误差,为未知参数估计误差,定义为为机械臂未知参数向量θ的估计值。
50、在一种可能的实现方式中,所述改进激励矩阵基于对机械臂模型动态的回归矩阵积分获得,所述回归矩阵通过对机械臂动力学模型进行线性参数化处理获得。
51、在一种可能的实现方式中,所述非奇异快速积分终端滑模面由下式计算得到:
52、
53、其中,s为非奇异快速积分终端滑模面,λ1,λ2,λ3,λ4,α,α1,β,β1均为控制器参数,其中:λ1、λ2、λ3、0<α<1,-1<β<0,α1=2α/(1-α),β1=2β/(1-β)。
54、在一种可能的实现方式中,所述辅助变量构建如下式所示:
55、
56、其中,为所构建的辅助变量。
57、在一种可能的实现方式中,所述参数更新律由下式计算得到:
58、
59、
60、其中,sign(·)为标准符号函数,γ,k1,为自适应增益矩阵,通常取正定对角阵,γ1和γ2为控制器参数,满足0<γ1<1,γ2>1,p为投影算子,为的范数,将半径为cθ的球形范围设定为机械臂未知参数向量的界,该界可由用户根据预先获取的机械臂模型参数粗略信息计算得到,为受限机械臂对应的动态回归矩阵。
61、在一种可能的实现方式中,所述固定时间控制力矩由下式计算得到:
62、
63、其中,τ为控制力矩,k3、为控制器增益矩阵,一般设定为正定对角阵。
64、第二方面,本技术提供一种受限机械臂固定时间自适应参数辨识、控制装置,所述装置包括:
65、建模模块:用于构建考虑机械臂关节位置跟踪误差受限的动力学模型;
66、处理与计算模块:用于获取当前机械臂关节的位置及速度数据,并将所述位置及速度数据与机械臂未知参数估计误差的历史数据信息相结合,计算得到参数预测误差;用于构建非奇异快速积分终端滑模面及辅助变量,结合所述的参数预测误差,计算参数更新律;用于基于所述参数更新律更新参数估计值,进而计算基于非奇异快速积分终端滑模面的固定时间控制力矩值;
67、控制模块:用于通过控制力矩驱动机械臂按预定轨迹运动,并保证机械臂关节位置跟踪误差一直限制在预定界限内;
68、计时模块:用于在系统设定的时间未结束时,获取下一时间为当前时间,并返回处理与计算模块。
69、本技术提供的技术方案至少可以达到以下有益效果:
70、本技术提供的一种受限机械臂固定时间自适应参数辨识、控制方法及装置,在现有复合学习控制理论基础上,通过构建不依赖初始条件的非对称障碍函数实现对机械臂关节位置跟踪误差的约束,同时设计了基于非奇异快速积分终端滑模的固定时间自适应控制方法,结合参数更新律,使机械臂模型未知参数估计误差和轨迹跟踪误差均能在较弱的区间激励条件下固定时间收敛至0,并且不会出现奇异问题,从而快速、精准得控制机械臂运动,有效提升了系统的控制性能。
- 还没有人留言评论。精彩留言会获得点赞!