一种机械臂的构建方法、装置、存储介质及电子设备与流程
本说明书涉及人形机器人,尤其涉及一种机械臂的构建方法、装置、存储介质及电子设备。
背景技术:
1、随着人工智能的快速发展,各种人形机器人也开始被广泛的应用到各行各业中,如救援机器人、按摩机器人以及演奏机器人等。其中,机械臂是人形机器人的重要部件之一,它要承受机器人服务作业过程中的各种复杂动态载荷,而且仿人手臂一体化关节造价很高,一旦发生损坏,损失巨大且不利于维修。因此,机械臂的强度性能评估对于整个机器人安全运行十分重要。
2、然而,目前对机械臂进行评估时主要依赖于工程师的经验,评估结果的准确性较低,评估指标也不够全面,很难根据得到的评估结果对机器人进行优化,导致实际构建出的机械臂不符合实际作业中的强度需求。
3、因此,如何对机械臂进行准确、全面的评估,从而根据评估结果进行准确的优化,构建出符合实际强度需求的机械臂,是一个亟待解决的问题。
技术实现思路
1、本说明书提供一种机械臂的构建方法、装置、存储介质及电子设备,以部分的解决现有技术存在的上述问题。
2、本说明书采用下述技术方案:
3、本说明书提供了一种机械臂的构建方法,包括:
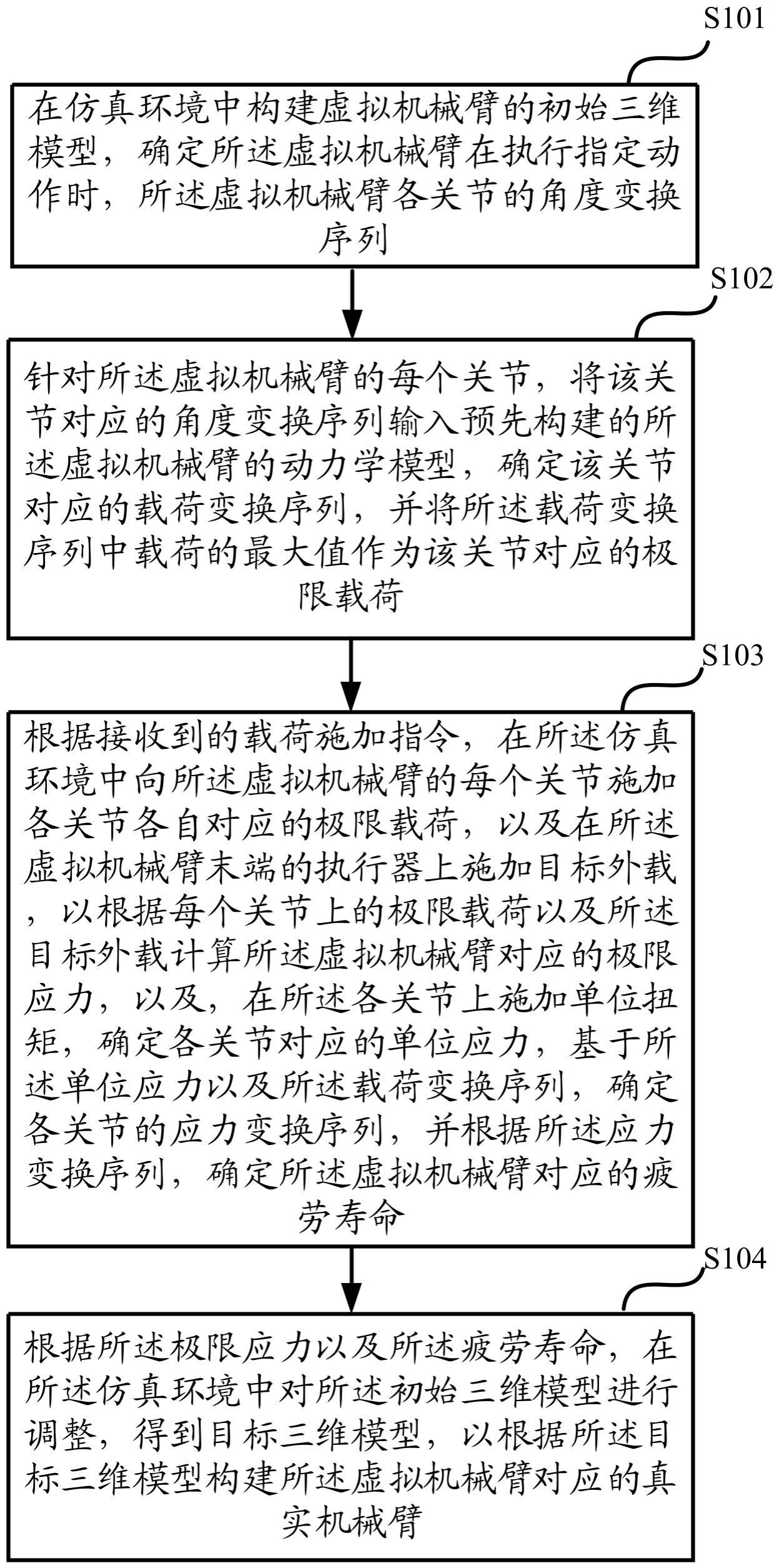
4、在仿真环境中构建虚拟机械臂的初始三维模型,确定所述虚拟机械臂在执行指定动作时,所述虚拟机械臂各关节的角度变换序列;
5、针对所述虚拟机械臂的每个关节,将该关节对应的角度变换序列输入预先构建的所述虚拟机械臂的动力学模型,确定该关节对应的载荷变换序列,并将所述载荷变换序列中载荷的最大值作为该关节对应的极限载荷;
6、根据接收到的载荷施加指令,在所述仿真环境中向所述虚拟机械臂的每个关节施加各关节各自对应的极限载荷,以及在所述虚拟机械臂末端的执行器上施加目标外载,以根据每个关节上的极限载荷以及所述目标外载计算所述虚拟机械臂对应的极限应力,以及,在所述各关节上施加单位扭矩,确定各关节对应的单位应力,基于所述单位应力以及所述载荷变换序列,确定各关节的应力变换序列,并根据所述应力变换序列,确定所述虚拟机械臂对应的疲劳寿命;
7、根据所述极限应力以及所述疲劳寿命,在所述仿真环境中对所述初始三维模型进行调整,得到目标三维模型,以根据所述目标三维模型构建所述虚拟机械臂对应的真实机械臂。
8、可选地,将该关节对应的角度变换序列输入预先构建的所述虚拟机械臂的动力学模型之前,所述方法还包括:
9、基于所述虚拟机械臂的结构动力学参数,构建所述虚拟机械臂的动力学模型,所述结构动力学参数包括所述虚拟机械臂各结构件的质量、质心位置以及转动惯量。
10、可选地,在所述仿真环境中向所述虚拟机械臂的每个关节施加各关节各自对应的极限载荷之前,所述方法还包括:
11、对所述初始三维模型进行有限元建模,确定所述虚拟机械臂对应的有限元模型,所述有限元模型包括:所述虚拟机械臂的各结构件、各关节对应的质量点、连接各结构件与各关节轴承的连接假体以及所述执行器对应的质量点;
12、针对每个关节,确定该关节对应的质量点和该关节对应的连接假体之间的第一刚性载荷单元,所述第一刚性载荷单元用于将该关节对应质量点上的载荷刚性传递到与该关节相连接的连接假体上,以及,确定所述执行器和所述执行器对应的连接假体之间的第二刚性载荷单元,所述第二刚性载荷单元用于将所述执行器对应质量点上的载荷刚性传递到与所述执行体相连接的连接假体上。
13、可选地,所述方法还包括:
14、确定所述有限元模型中各网格结构对应的单元属性以及材料属性;
15、将所述有限元模型中各关节所在位置的结构件与连接假体之间建立绑定关系。
16、可选地,在所述仿真环境中向所述虚拟机械臂的每个关节施加各关节各自对应的极限载荷,以及在所述虚拟机械臂末端的执行器上施加目标外载,具体包括:
17、针对所述虚拟机械臂的每个关节,在所述仿真环境中向该关节对应的质量点和该关节对应的连接假体之间的第一刚性载荷单元上施加该关节对应的极限载荷,向所述第二刚性载荷单元上施加所述目标外载。
18、可选地,根据每个关节上的极限载荷以及所述目标外载计算所述虚拟机械臂对应的极限应力,具体包括:
19、根据每个关节上的极限载荷以及所述目标外载计算所述虚拟机械臂对应的极限应力以及位移情况;
20、根据所述极限应力以及所述疲劳寿命对所述初始三维模型进行调整,具体包括:
21、根据所述极限应力、所述位移情况以及所述疲劳寿命对所述初始三维模型进行调整。
22、可选地,根据所述应力变换序列,确定所述虚拟机械臂对应的疲劳寿命,具体包括:
23、根据所述虚拟机械臂各构件的材料属性,以及所述应力变换序列,确定所述虚拟机械臂对应的应力—寿命s-n曲线;
24、根据所述s-n曲线,确定所述虚拟机械臂对应的疲劳寿命。
25、可选地,在所述各关节上施加单位扭矩,确定各关节对应的单位应力之前,所述方法还包括:
26、判断所述极限应力是否小于许用应力;
27、若否,对所述初始三维模型进行调整,直到所述极限应力小于许用应力,得到调整后三维模型。
28、可选地,根据所述极限应力以及所述疲劳寿命对所述初始三维模型进行调整,得到目标三维模型,具体包括:
29、判断所述疲劳寿命是否大于预设周期数,若否,对所述调整后三维模型进行调整,直到所述疲劳寿命大于所述预设周期数,得到所述目标三维模型。
30、可选地,基于所述单位应力以及所述载荷变换序列,确定各关节的应力变换序列,并根据所述应力变换序列,确定所述虚拟机械臂对应的疲劳寿命,具体包括:
31、基于所述单位应力以及所述载荷变换序列,确定各关节在六个应力分量上的应力变换序列;
32、根据所述六个应力分量上的应力变换序列,确定所述疲劳寿命。
33、本说明书提供了一种机械臂的构建装置,包括:
34、确定模块,在仿真环境中构建虚拟机械臂的初始三维模型,确定所述虚拟机械臂在执行指定动作时,所述虚拟机械臂各关节的角度变换序列;
35、输入模块,针对所述虚拟机械臂的每个关节,将该关节对应的角度变换序列输入预先构建的所述虚拟机械臂的动力学模型,确定该关节对应的载荷变换序列,并将所述载荷变换序列中载荷的最大值作为该关节对应的极限载荷;
36、施加模块,根据接收到的载荷施加指令,在所述仿真环境中向所述虚拟机械臂的每个关节施加各关节各自对应的极限载荷,以及在所述虚拟机械臂末端的执行器上施加目标外载,以根据每个关节上的极限载荷以及所述目标外载计算所述虚拟机械臂对应的极限应力,以及,在所述各关节上施加单位扭矩,确定各关节对应的单位应力,基于所述单位应力以及所述载荷变换序列,确定各关节的应力变换序列,并根据所述应力变换序列,确定所述虚拟机械臂对应的疲劳寿命;
37、构建模块,根据所述极限应力以及所述疲劳寿命,在所述仿真环境中对所述初始三维模型进行调整,得到目标三维模型,以根据所述目标三维模型构建所述虚拟机械臂对应的真实机械臂。
38、可选地,所述确定模块还用于,基于所述虚拟机械臂的结构动力学参数,构建所述虚拟机械臂的动力学模型,所述结构动力学参数包括所述虚拟机械臂各结构件的质量、质心位置以及转动惯量。
39、可选地,所述施加模块还用于,对所述初始三维模型进行有限元建模,确定所述虚拟机械臂对应的有限元模型,所述有限元模型包括:所述虚拟机械臂的各结构件、各关节对应的质量点、连接各结构件与各关节轴承的连接假体以及所述执行器对应的质量点;针对每个关节,确定该关节对应的质量点和该关节对应的连接假体之间的第一刚性载荷单元,所述第一刚性载荷单元用于将该关节对应质量点上的载荷刚性传递到与该关节相连接的连接假体上,以及,确定所述执行器和所述执行器对应的连接假体之间的第二刚性载荷单元,所述第二刚性载荷单元用于将所述执行器对应质量点上的载荷刚性传递到与所述执行体相连接的连接假体上。
40、本说明书提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述机械臂的构建方法。
41、本说明书提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述机械臂的构建方法。
42、本说明书采用的上述至少一个技术方案能够达到以下有益效果:
43、在本说明书提供的机械臂的构建方法中,在仿真环境中构建虚拟机械臂的初始三维模型,确定各关节的角度变换序列,将各关节对应的角度变换序列输入动力学模型,确定各关节的载荷变换序列并将载荷的最大值作为极限载荷,向虚拟机械臂的每个关节施加各关节各自对应的极限载荷,在虚拟机械臂的执行器上施加目标外载,以计算极限应力,以及,在各关节上施加单位扭矩,确定各关节对应的单位应力,基于单位应力以及载荷变换序列,确定应力变换序列,根据应力变换序列确定疲劳寿命,根据极限应力以及疲劳寿命得到目标三维模型并构建真实机械臂。
44、从上述方法可以看出,本方案在对虚拟机械臂的极限应力和疲劳寿命进行评估之前,可以先依据虚拟机械臂在执行指定动作时的角度变换序列,对虚拟机械臂的初始三维模型进行动力学分析,这样一来,就可以确定出该初始三维模型的虚拟机械臂在执行指定动作的过程中各关节的载荷情况以及极限载荷,从而为后续的极限应力评估和疲劳寿命评估提供精确、可靠的数据,相比于目前依赖于工程师的经验进行评估的方法,本方案能够对虚拟机械臂的极限应力以及疲劳寿命进行准确的评估,从而根据评估结果对虚拟机械臂的三维模型进行调整,使得实际构建出的真实机械臂满足实际作业中的安全性要求。
- 还没有人留言评论。精彩留言会获得点赞!