本发明涉及光伏,具体而言,涉及一种储能机器人和一种储能系统。
背景技术:
1、目前,在户外场景下,用户在需要用电时,通常会选择户外电源,对于用户用电需求较高的情况下,现有的户外电源的重量随着储电量的增多而增大,在长时间需要使用户外电源时,通常会利用太阳能进行充能,充能效率与太阳能板的面积相关,太阳能板的面积过大,无法很好的兼顾便携性和充电效率,此外,在存在多点用电的需求时,搬运户外电源较为费力。
技术实现思路
1、本发明旨在至少解决现有技术或相关技术中存在的无法兼顾便携性和充电效率的技术问题。
2、有鉴于此,本发明第一方面的技术方案提供了一种储能机器人。
3、本发明第二方面的技术方案提供了一种储能系统。
4、本发明另一方面的技术方案还提供了另一种储能系统。
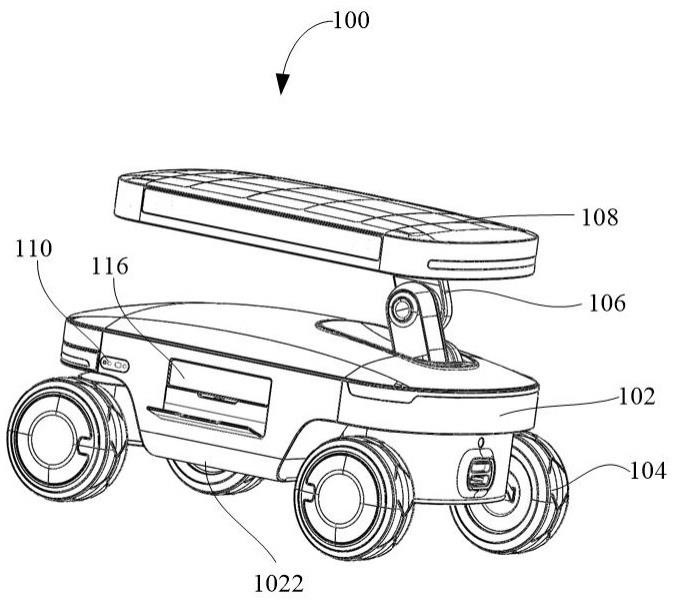
5、为了实现上述目的,本发明第一方面的技术方案提供了一种储能机器人,包括:底座,底座内设有电池,底座的底部设有移动装置,移动装置用于驱动底座相对于地面移动;支架,与底座可拆卸连接,支架上设有多个太阳能板,太阳能板与电池电连接,太阳能板可相对于支架发生转动,以调整光线的入射角度;多个传感器,设于底座和/或支架上,传感器用于确定底座的移动范围和/或光照信息;控制器,与传感器、太阳能板和移动装置电连接,控制器根据光照信息确定对应于最佳光伏转换效率的位置信息和角度信息,且控制器控制移动装置根据位置信息移动,控制太阳能板相对于支架根据角度信息转动;其中,多个太阳能板在第一状态下的受光面积小于在第二状态下的受光面积。
6、根据本发明提出的储能机器人,主要包括底座、支架和传感器,其中,底座内设有电池,作为储能部件,在底座还设有移动装置,在移动装置的作用下可带动底座进行移动,从而实现一定区域范围内的移动供电,可以理解,在户外场景下,在不同时间点会存在不同地点的用电需求,此时可通过移动装置带着电池移动到不同位置,极大的提高用户的使用便利程度,提高用户的使用体验。此外,在底座上还设有可拆卸连接的支架,通过在支架上设置太阳能板,在户外阳光较为强烈、且发电效率较高的情况下,可通过太阳能板对电池进行补能,从而保证更长时间的使用。本方案中,在底座和支架中的至少一个结构上还设有传感器,可对储能机器人周边的环境以及对应的移动范围进行获取和确定,从而可实现底座的移动控制、太阳能板的移动控制,甚至是对天气阴晴的检测,极大地提高储能机器人在使用过程中的智能化,可作为用户在实际使用中较为理想的工具,提高用户的使用体验。
7、本方案中,在发电模式下,传感器时刻检测户外阳光,通过特定算法,确定在一定区域内的最佳发电位置以及太阳能板的最佳发电角度。具体地,底座和支架上设有多个传感器,用于确定底座的移动范围和光照信息,使机器人能够根据实时环境信息进行自适应调整,太阳能板可相对于支架发生转动,以调整光线的入射角度,从而使太阳能板始终保持在最佳光照条件下,提高光伏转换效率。进一步地,通过智能控制太阳能板的位置和角度,以及底座的移动,使机器人能够在不同环境中实现最佳光伏转换效率,从而提高能源利用率,降低能耗。
8、需要强调的是,本方案中位于支架上的太阳能板是可以移动的,存在不同状态,在第一状态下,多个太阳能板的受光面积较小,属于收纳状态,仅存在一个太阳能板或者不存在太阳能板接受到光线为电池充电,在第二状态下,多个太阳能板的受光面积较大,属于展开状态,此时应用于阳光较为强烈、且需要大功率为电池充电的场景。
9、可以理解,太阳能板和电池之间为电连接,具体可以为:太阳能板和电池之间的连接需要使用一个充电控制器。在具体连接时,需先将太阳能板的正极和负极分别连接到充电控制器的正极和负极,再将电池的正极和负极分别连接到充电控制器的正极和负极。
10、进一步地,储能机器人整体可以移动,且支架相对于底座的位置可以调整,从而可改变太阳能板的角度,兼顾便携性和发电效率,提高光电转换效率。
11、进一步地,支架和底座之间的连接为可拆卸连接,具体包括但不限于磁吸连接、卡扣连接等,只要方便二者相连即可。
12、其中,移动装置可以仅为车轮,通过外力带动底座移动,或者车轮上设置电机的驱动轮,驱动轮可以直接带动底座移动。
13、上述技术方案中,控制器用于根据光照信息确定在多个位置下多个太阳能板的综合光伏转换效率,确定综合光伏转换效率最高的多个太阳能板的角度信息以及底座的位置信息。
14、在该技术方案中,控制器根据传感器获取的光照信息,计算多个太阳能板在多个位置下的综合光伏转换效率。这有助于找到各个太阳能板在不同环境下的最佳工作状态,从而提高整体能源利用率;根据计算得到的综合光伏转换效率,确定综合光伏转换效率最高的多个太阳能板的角度信息以及底座的位置信息。这有助于实现太阳能板的自适应调整和底座的智能移动,以达到最佳光伏转换效率。进一步地,控制器根据确定的最优角度信息和位置信息,控制太阳能板相对于支架转动以及底座的移动,实现自动调整太阳能板的角度和底座的位置,从而提高整体光伏转换效率。
15、上述技术方案中,储能机器人还包括:定位装置,与控制器相连,定位装置用于确定底座所处位置的经纬度信息;其中,控制器用于根据经纬度信息确定日照方向信息,根据日照方向信息控制太阳能板转动至太阳法向辐射量最大的角度信息。
16、在该技术方案中,这个方案通过引入定位装置和控制器的协同工作,实现了太阳能板角度的自动调整和底座的精确定位,从而提高了光伏转换效率和能源利用率。具体地,控制器根据经纬度信息确定日照方向信息,再根据日照方向信息控制太阳能板转动至太阳法向辐射量最大的角度信息。这样,太阳能板可以始终保持在最佳的光照条件下,提高光伏转换效率。
17、需要说明的是,随着时间的变化,最佳发电位置和最佳发电角度均会发生变化。在一定区域内,光照方向是固定的,故而可通过机器人所在的经纬度,确定对应的日照方向,先确定出第一发电角度,再根据实际的云彩情况,确定发电位置,最终实现调整。
18、上述技术方案中,移动装置包括履带和/或万向轮。
19、在该技术方案中,对于移动装置而言,可以采用单履带的结构,即仅存在履带一种类型的结构,或者采用单万向轮的结构,即仅存在万向轮一种类型的结构,甚至可以在底座上同时设置履带和万向轮,履带结构的适应性强,履带能够适应多种地形,包括泥泞、崎岖、不平等等,负载能力强,能够承载更重的重量,牵引力强,履带的牵引力比轮子更强,能够在更陡峭的坡度上行驶,更稳定,履带的接地面积比轮子更大,能够提供更稳定的行驶。万向轮的滚动摩擦比履带更小,所以轮子能够提供更快的速度,且更灵活,可更容易地进行转弯和掉头。
20、在实际使用中可根据储能机器人的具体使用场景灵活选择履带和万向轮,例如对于应用在山地上的户外场景下,可使用单履带的结构,应用于较为平整的广场的户外场景,则可使用万向轮结构。
21、上述技术方案中,储能机器人还包括:收纳箱,设于支架上,收纳箱远离底座的一侧设有太阳能板;其中,其余太阳能板在第一状态下层叠收纳于收纳箱内,在第二状态下伸出收纳箱。
22、在该技术方案中,通过在支架上设置收纳箱,可为多个太阳能板提供一定的收纳空间,使得多个太阳能板在第一状态下会收纳于收纳箱中,大幅度减少太阳能板的存储空间,提高便携性,在第二状态下,多个太阳能板会伸出收纳箱,使得多个太阳能板对应的受光面积增大,提高发电效率。
23、进一步地,在收纳箱的顶部,即远离底座的一侧设置有一个太阳能板,在多个太阳能板收纳于收纳箱中的情况下,仍旧可以利用位于顶侧的太阳能板进行低功率的持续充电。
24、其中,收纳箱可固定于支架上,也可以与支架活动连接。
25、上述技术方案中,在第二状态下,多个太阳能板相互平行。
26、在该技术方案中,由于储能机器人相对于太阳的体积过小,且太阳和储能机器人之间的距离过远,故而太阳发射的光线朝向在多个太阳能板处于第二状态下的情况下,通过限制多个太阳能板相互平行,使得每个太阳能板与阳光所呈的角度均相同,利用多个太阳能板,可有效提高发电效率,且在调整太阳能板的角度时,可一同调整,从而简化操作。
27、需要说明的是,由于多个太阳能板相互平行,在顶部设置一个太阳能板的情况下,多个太阳能板与收纳箱的顶部表面相平行。
28、上述技术方案中,支架与底座转动连接,支架与水平面之间所呈夹角为0°~60°。
29、在该技术方案中,通过限制支架与底座之间转动连接,可有效调整支架的角度,使得在转动范围内,太阳能板通过调整姿态可以较高的发电效率进行发电。
30、进一步地,支架与底座之间的转动范围进行限定,具体限定支架无论相对于底座如何旋转,其与水平面之间的夹角在60°以下,从而可起到更好的发电效果。
31、上述技术方案中,储能机器人还包括:拉杆结构,可伸缩地设于底座在前后方向的至少一端。
32、在该技术方案中,通过在底座上设置拉杆结构,便于用户自行移动储能机器人,用户的操作更为省力。具体地,拉杆结构设置在底座的前侧,用户通过拉杆结构拉拽底座,或者拉杆结构设置在底座的后侧,用户通过拉杆结构可前推底座。
33、进一步地,拉杆结构为伸缩结构,在用户需要时可伸长,便于用户推拉,在用户不需要对底座进行移动时,拉杆结构可缩回,减少所占据的空间。
34、上述技术方案中,储能机器人还包括:供电面板,设于底座上,供电面板上设有多个供电接口;其中,多个供电接口的接口类型不同。
35、在该技术方案中,通过在底座上设置供电面板,可在供电面板上显示电池的充电状态和输出电压,同时在供电面板上可利用供电接口向外提供电量,以供用电设备使用。
36、可以理解,在一般的用电场景下,用户的用电设备的接口类型并不统一,故而本方案中在供电面板上设置有多种不同规格,即不同接口类型的供电接口,以便于用户使用。
37、进一步地,接口类型包括但不限于国标接口、交流电接口、直流电接口、不同电压的接口、通用串行总线(即universal serial bus,usb)直插式接口等。
38、上述技术方案中,太阳能板具体包括:板体支架;光伏板,设于板体支架上,且光伏板的受光面远离底座设置。
39、在该技术方案中,对于太阳能板而言,主要包括板体支架和光伏板,板体支架设置在支架上,与支架固定连接或活动连接,通过将光伏板设置在板体支架上,板体支架可为光伏板起到一定的保护作用,防止在安装或使用时对光伏板进行损害。
40、需要补充的是,光伏板在安装时,其接受光线的表面设置在顶侧,即受光面远离底座设置,从而更便于太阳能的转换。
41、本发明第二方面的技术方案提供了一种储能系统,包括:充电桩;上述第一方面中任一项的储能机器人,储能机器人移动至充电桩的充电位置,充电桩为储能机器人充电。
42、根据本发明提供的储能系统,包括充电桩和储能机器人,充电桩可对应有一个可以进行充电的范围,即充电位置,在储能机器人移动至充电位置时,充电桩会为储能机器人充电,此时电流会由充电桩转移至储能机器人的电池中,便于后续使用。
43、当然,由于储能系统包括上述任一技术方案的储能机器人,具有上述任一储能机器人的方案的技术效果,在此不再赘述。
44、本发明另一方面的技术方案提供了一种储能系统,包括:储电桩,储电桩电连接至储能设备;上述第一方面中任一项的储能机器人,储能机器人移动至储电桩的储电位置,储能机器人通过储电桩将电量输送至储能设备中。
45、根据本发明提供的储能系统,包括储电桩和储能机器人,储电桩可对应有一个可以进行储电的范围,即储电位置,在储能机器人移动至储电位置时,储能机器人可将电量转移至储电桩处,再通过储电桩与储能设备之间的连接,电量最终转移至储能设备内,以便于家庭的用电设备使用。
46、在一个场景下,储能机器人在白天会不断地充电,内置的电池充满后会自行移动至储电位置为储能设备充电,再前往户外吸收太阳能进行充电。
47、当然,由于储能系统包括上述任一技术方案的储能机器人,故而具有上述任一储能机器人的方案的技术效果,在此不再赘述。
48、本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。