一种智能化末端执行器及扣合状态感知方法
本发明涉及3c装配,特别是涉及一种智能化末端执行器及扣合状态感知方法,适用于排线装配工作中替代人工的机器人智能自主操作,满足3c装配中使用机器人智能化地实现排线装配任务的实际应用需求。
背景技术:
1、3c装配制造业具有产品迭代快、操作任务复杂、操作对象非标程度高等特点,其生产和精密装配环境存在明显的不确定性。3c零件大多是轻小的非标准零件,形状复杂易变形,其装配对执行器的灵巧性和适应性提出了很高的要求。同时,3c装配对装配操作的要求很高,缺乏感知能力的传统自动化装配方式难以完成自适应操作。随着自动化执行器在3c装配领域的广泛应用,一些简单的装配任务由人工改为自动化生产,但复杂精密的装配任务仍依赖人工完成。
2、近年来,随着需求的增加,国内外出现了各种不同的针对特定3c装配场景的末端执行器。对于微小排线装配的任务场景,有使用夹取和按压的组合式末端执行器,有将待装配设备固定在平台上使用推杆将排线插入的自动化执行器。这些执行器能在单一不变的固定场景中完成装配任务,但由于排线装配对操作精度的要求高,执行器若不具有触觉感知能力,则无法完成对排线扣合状态的感知,从而不具备在装配过程中的精细调整能力,容易在装配过程中对排线造成损坏,且排线扣合的成功率较低。另外,这些执行器要求处于固定的装配场景中,智能自主性差,导致在装配任务和场景改变时需要对装配系统进行调整,生产效率低。
3、关于触觉感知在工业场景中的应用,国内外也出现了较多的研究成果。美国麻省理工大学的研究团队使用gelsight视触觉传感器获得接触面的力信息,分析得到线缆的位姿估计和摩擦力矢量,从而自适应地完成线缆捋线操作;德国普朗克研究院的研究团队使用视触觉传感器对接触面的立体触觉图像进行绘制,建立被抓取物体的形状特征。然而,由于视触觉传感器难以在小型化执行器上集成,且缺乏实用可行的触觉信息分析方法,目前尚未出现触觉感知在实际3c装配生产中应用的实例。
技术实现思路
1、本发明的目的是提供一种智能化末端执行器及扣合状态感知方法,能够智能自主、自适应、灵巧高精度地对排线进行装配操作,以解决现有自动化装配技术在排线装配应用中的问题,满足使用机器人智能化地完成微小排线装配任务的实际应用需求。
2、为实现上述目的,本发明提供了如下方案:
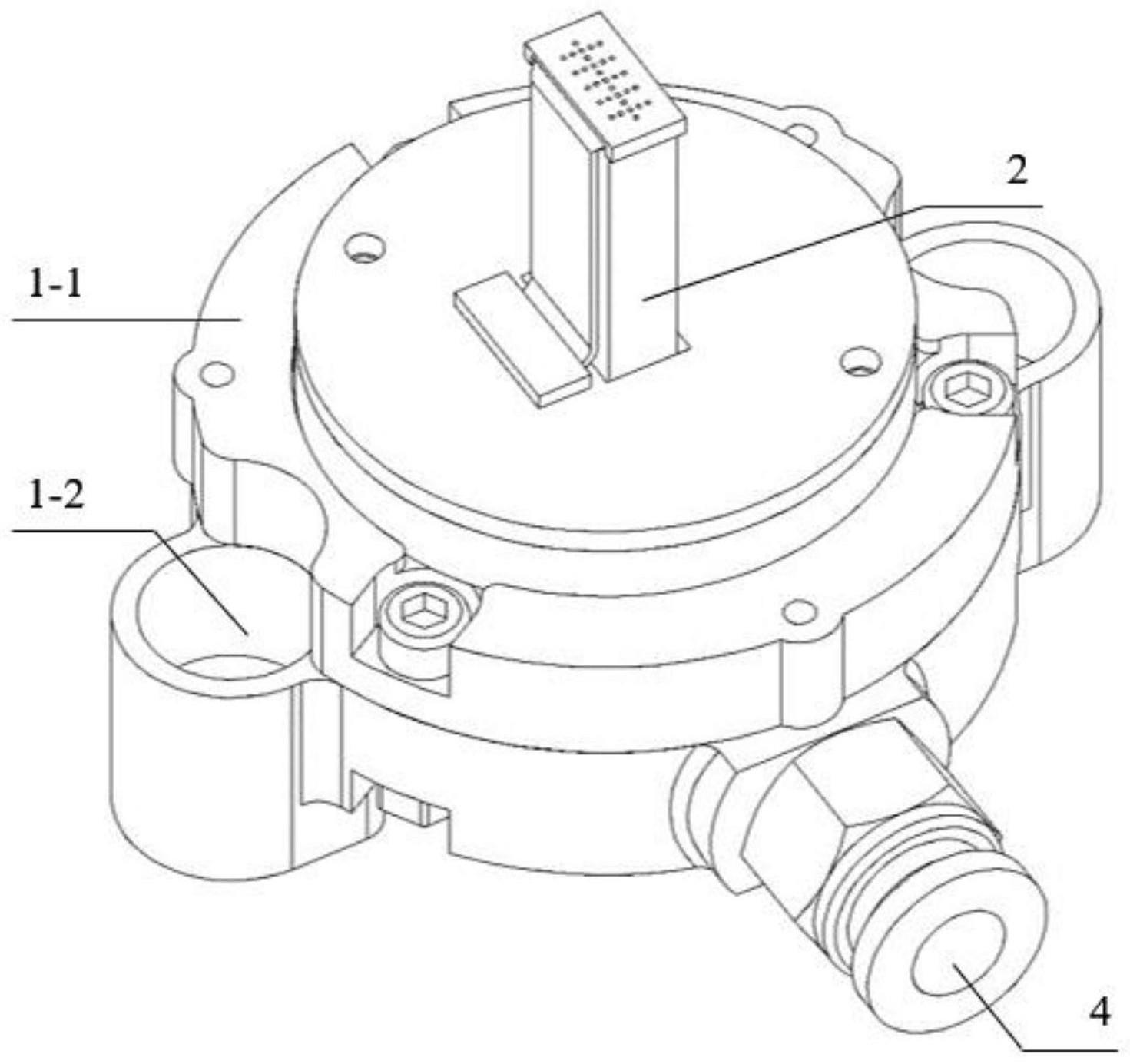
3、本发明提供了一种智能化末端执行器,包括底座、按压头、弹性结构和触觉传感器,所述触觉传感器包括相互电连接的传感器主板和传感器敏感头,所述按压头的下部位于所述底座中,所述按压头与所述底座之间设置有所述弹性结构,所述按压头的上部位于所述底座的外部,所述传感器主板位于所述底座上,所述传感器敏感头位于所述按压头的上部,所述传感器敏感头用于测量所述按压头与排线接触时接触面的力信息,所述传感器敏感头将采集的接触面的力信息传输至所述传感器主板,所述传感器主板用于将接触面的力信息传输至计算机进行处理,所述按压头的内部设置有第一气路,所述第一气路的上端延伸至所述按压头的上部,所述第一气路与所述底座的第二气路连通,所述第一气路和所述第二气路形成负压气路。
4、优选地,所述底座包括上底座、下底座和安装环,所述传感器主板设置在所述安装环上,所述安装环和所述上底座能够拆卸地连接,所述上底座和所述下底座能够拆卸地连接,所述安装环上设置有用于所述按压头穿过的通孔,所述下底座两侧的对称突出结构用于和通用机械臂的法兰配合。
5、优选地,所述按压头包括第一连接部和第二连接部,所述第一连接部的截面呈矩形,所述第二连接部的截面呈圆形,所述第一连接部位于所述底座的外部,所述第二连接部位于所述底座的内部。
6、优选地,所述第一连接部的上端设置有凹槽和第一通气孔,所述第一通气孔与所述第一气路连通,所述凹槽用于放置所述传感器敏感头,所述传感器敏感头上与所述第一通气孔对应的位置设置有第二通气孔。
7、优选地,所述传感器敏感头包括自下而上依次设置的下层软板、电介质层和上层软板;
8、所述下层软板包括自下而上依次设置的主软板底层、第二内层、第一内层和主软板顶层,所述主软板顶层上设置有若干第一电极,所述主软板底层的下表面设置有第一焊盘,所述第一电极的信号通过所述第一内层传输至所述第一焊盘,所述主软板顶层上设置有增强层,所述增强层用于所述第一焊盘与所述传感器主板插接实现所述传感器主板与所述第一焊盘的信号传输;
9、所述上层软板包括副软板底层和副软板顶层,所述副软板底层设置在所述副软板顶层的下方,所述副软板底层的下表面设置有若干第二电极,所述第二电极与所述第一电极形成电容器,所述电介质层位于所述第一电极和所述第二电极之间,所述副软板顶层上和所述主软板顶层上均设置有第二焊盘,所述副软板顶层上的所述第二焊盘和所述主软板顶层上的所述第二焊盘连通实现所述下层软板和所述上层软板的信号传输。
10、优选地,所述传感器敏感头上设置有刚毛结构,所述刚毛结构的刚毛呈楔形。
11、优选地,所述弹性结构为环形弹片,所述环形弹片嵌设所述底座的嵌套结构空腔中,所述按压头的下端与所述环形弹片接触;
12、所述按压头与所述底座之间设置有密封圈。
13、本发明还公开了一种扣合状态感知方法,所述方法应用于上述的智能化末端执行器,所述扣合状态感知方法,包括:
14、获取触觉传感器采集的力信息;所述力信息包括阵列式切向力和阵列式法向力;
15、根据所述力信息,判断排线的偏离状态;所述偏离状态为未偏离、正向偏离、反向偏离或者失效;
16、若所述偏离状态为正向偏离或者反向偏离,则根据所述偏离状态控制智能化末端执行器带动排线公头向对齐方向进行移动;
17、在移动过程中,根据所述力信息,判断排线的对齐状态;所述对齐状态为对齐开始或者对齐结束;
18、若所述对齐状态为对齐结束,则所述排线停止移动,并返回“根据所述力信息,判断排线的偏离状态”的步骤;
19、若所述偏离状态为未偏离,则控制智能化末端执行器执行扣合操作。
20、优选地,根据所述力信息,判断排线的偏离状态,具体包括:
21、若所述阵列式切向力大于第一切向力设定阈值,则确定所述排线的偏离状态为失效;
22、若所述阵列式切向力小于等于所述第一切向力设定阈值,则将所述阵列式法向力在待判断方向上进行投影得到法向力分布散点图;
23、利用最小二乘法对所述法向力分布散点图进行直线拟合,得到拟合直线;
24、判断所述拟合直线的斜率绝对值是否小于斜率阈值;
25、若是,则确定所述排线的偏离状态为未偏离;
26、若否,则判断所述斜率绝对值是否为正;
27、若是,则确定所述排线的偏离状态为正向偏离;
28、若否,则确定所述排线的偏离状态为反向偏离。
29、优选地,根据所述力信息,判断排线的对齐状态,具体包括:
30、根据当前帧的所述阵列式法向力,确定当前帧的三帧法向力均值;
31、根据前一帧的所述阵列式法向力,确定前一帧的三帧法向力均值;
32、确定当前帧的三帧法向力均值和前一帧的三帧法向力均值的比值;
33、判断所述比值是否小于法向力设定阈值;
34、若是,则确定所述排线的对齐状态为对齐开始;
35、根据当前帧的所述阵列式切向力,确定当前帧的三帧切向力均值;
36、根据前一帧的所述阵列式切向力,确定前一帧的三帧切向力均值;
37、根据前两帧的所述阵列式切向力,确定前两帧的三帧切向力均值;
38、确定当前帧的三帧切向力均值和前一帧的三帧切向力均值的比值;
39、确定前一帧的三帧切向力均值和前两帧的三帧切向力均值的比值;
40、判断当前帧的三帧切向力均值和前一帧的三帧切向力均值的比值以及前一帧的三帧切向力均值和前两帧的三帧切向力均值的比值是否均大于第二切向力设定阈值;
41、若是,则确定所述排线的对齐状态为对齐结束。
42、本发明相对于现有技术取得了以下技术效果:
43、本发明的智能化末端执行器结合负压吸附,通过小尺寸的按压头对细小的排线进行操作,触觉传感器采集触觉信息并以此感知扣合状态,对机械臂的动作进行反馈;且按压头具有一定的平面适应性,提高了执行器对微小排线进行装配操作时的稳定性和灵巧性。
- 还没有人留言评论。精彩留言会获得点赞!