一种基于TSN的遥操作巡检机器人控制系统及控制方法
本发明属于机器人和工业互联网领域,具体说是一种基于tsn的遥操作巡检机器人控制系统及控制方法。
背景技术:
1、作为国民经济的命脉,我国矿产资源的开采工作始终在有条不紊地进行,这些矿产资源为工业生产提供稳定的能源供应,也为科技发展与科学进步提供了有力保障,更是改善国民生活水平的重要物资。矿产资源开采是指固体金属与非金属矿床的开采,包括地表矿体露头及浅部矿体的露天开采和盲矿、深部矿体的地下开采,而地下开采通常需要采集人员深入到幽深的矿洞中进行作业任务,然而频繁发生的矿洞安全事故带来了巨大的生命与财产损失。加强矿洞巡查,实时监测矿洞状态并传递给监控中心,及时发现并排除矿洞安全隐患,将大大减少矿洞安全事故的发生。出于无人则安、少人则安的考虑,我们将矿洞的巡检工作交给远程操控的机器人。远程操控机器人是一种十分有效的解决方案,借助对机器人进行实时、异地远端操控,可以很大程度上保证从业人员的生命安全并且可以有效解放生产力。远程操控机器人的关键性问题是机器人的主从端系统操作一致性和实时性问题,其中包括信号的实时性、稳定性和传输多种信号时发生冲突等技术问题,同时在极端的网络环境下需要保证传输时延可控。
2、在现有技术中,专利申请号为201810984133.5的一种基于网络的机器人控制系统,将网络通信模块运用到机器人的远程控制当中,便于使用与开发。专利申请号为201911173667.0的基于stm32的矿井勘测机器人控制系统,对微处理器stm32f103zet6进行开发,利用stm32接口丰富的特点加装各类传感器的方法,实现矿井机器人异地控制,从而达到监测的目的。专利申请号为202011064929.2的一种基于5g网络的户外勘测机器人控制方法及系统,利用了5g网络的优势,实现了在勘测机器人上运行大流量应用,解决了远程遥控功能单一的问题,改善了勘测机器人的工作过程。
3、然而在通信协议方面,一些传统的工业以太网通信协议如profinet、ethernet/ip、ethercat、sercosiii、cc-link、powerlink等,无法提供同时具备实时性、有界低时延性、可靠性并且兼容性较好的服务。
技术实现思路
1、为解决上述问题,本发明提供一种基于tsn的遥操作巡检机器人控制系统,充分利用tsn时间敏感网络所具备的低时延、时延有界性等确定性传输特征,从而在保证矿洞巡检机器人主从端操控一致性的同时,操作过程具有确定性的低时延,并且由于tsn这项技术具备的多业务统一承载特性,节约了现场网络布置的成本,为矿洞的巡检工作提供了一种优异、实用且低成本的解决方案。
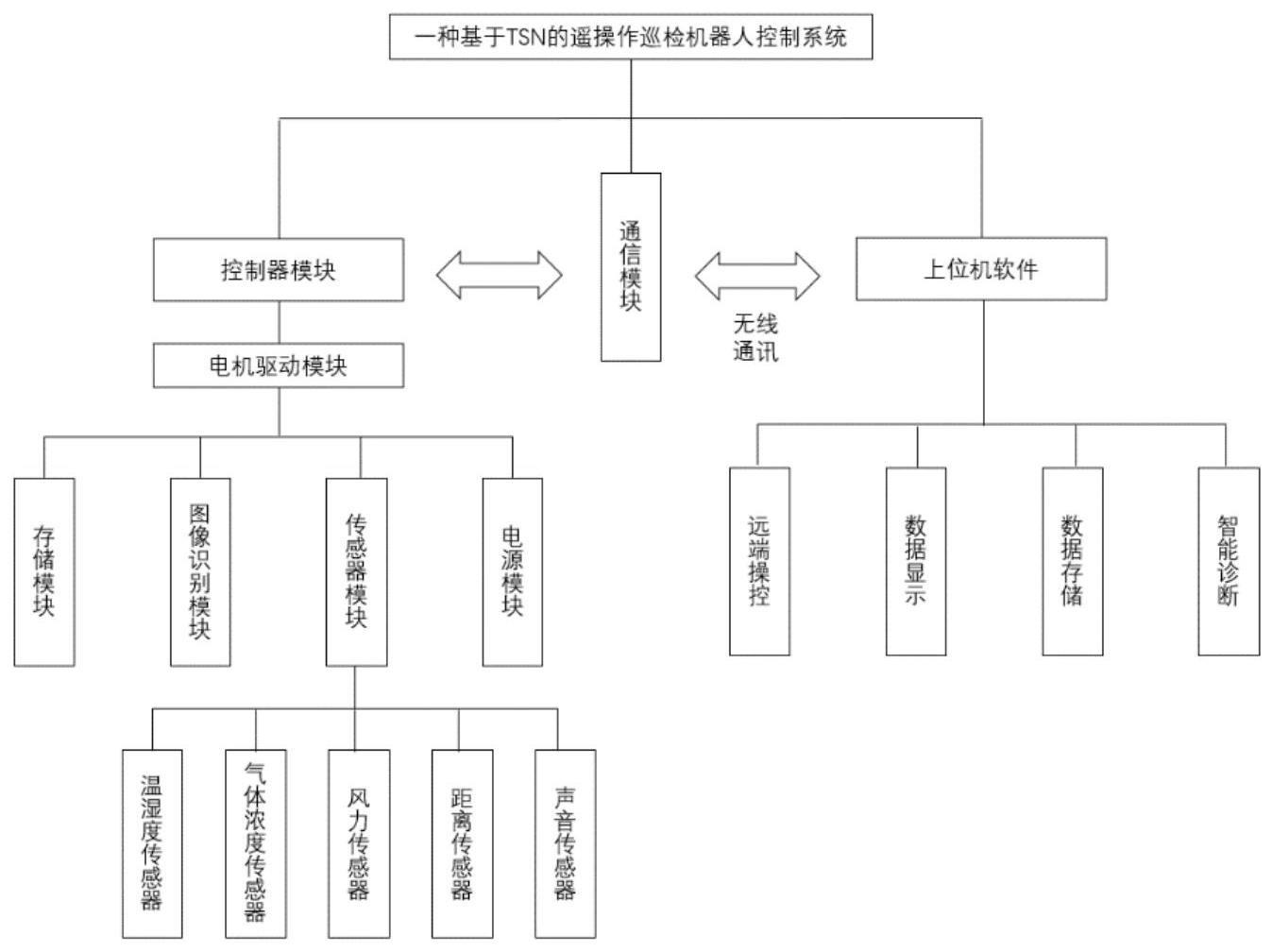
2、本发明为实现上述目的所采用的技术方案是:一种基于tsn的遥操作巡检机器人控制系统,包括:上位机、设于机器人本体上的控制器模块、通信模块、电机驱动模块、信息采集模块、导航定位模块、图像识别模块以及存储模块;
3、所述上位机,用于通过通信模块与控制器模块无线通信,以实现无线操控机器人本体,并接收控制器模块传回的环境数据;
4、所述控制器模块,用于接收上位机发送的操纵指令,并通过电机驱动模块控制机器人本体的位姿和机器人本体机械臂的动作;同时,获取信息采集模块实时采集目标区域内的环境数据,并将环境数据通过通信模块回传至上位机;
5、所述信息采集模块,用于采集目标区域内的环境数据,并反馈至控制器模块;
6、所述导航定位模块为北斗导航系统,用于对机器人本体进行定位,并将定位数据发送至控制器模块;
7、所述图像识别模块,用于拍摄目标区域的实时图像,并将图像发送至上位机,实现对目标区域内的实时监控;同时,将当前图像发送至存储模块存储,以用于通过控制器模块调用进行地图构建。
8、所述信息采集模块,包括:均与控制器模块连接的温湿度传感器、气体浓度传感器、风力传感器、距离传感器、声音传感器以及红外热像仪;
9、所述温湿度传感器、气体浓度传感器、风力传感器、距离传感器、声音传感器以及红外热像仪均支持tsn协议;
10、所述温湿度传感器,用于测量矿井内环境温度以及矿井主扇轴温的设备温度;
11、所述气体浓度传感器,用于测量矿井内甲烷气体的浓度;
12、所述风力传感器,用于测量矿井内风速风向;
13、所述距离传感器,发送距离数据至图像识别模块进行地图构建;
14、所述声音传感器,该传感器内置一对声音敏感的电容式驻极体话筒,通过声波使话筒内的驻极体薄膜振动,导致电容的变化,进而产生与之对应变化的微小电压;
15、所述红外热像仪,用于检测矿洞内的热源。
16、所述通信模块为支持tsn协议的无线通信模块或tsn交互机。
17、所述上位机,包括:远程操纵模块、数据显示模块、数据存储模块以及数据诊断模块;
18、所述远程操纵模块,用于向控制器模块发送操纵指令,以实现远程控制机器人本体的位姿和机器人本体机械臂的动作;
19、所述数据显示模块,用于对接收控制器模块传输的目标区域内的环境数据进行实时显示;
20、所述数据存储模块,用于实时存储控制器模块发送的目标区域内的环境数据;
21、所述数据诊断模块,用于判断控制器模块发送的目标区域内的环境数据是否满足预设定的标准值。
22、一种基于tsn的遥操作巡检机器人控制系统的控制方法,包括以下步骤:
23、1)操作人员通过位于监控中心的上位机创建任务新项目,通过通信模块与矿洞中的机器人建立远程连接;
24、2)控制器模块通过信息采集模块采集当前位置的环境数据,并将环境数据回传至上位机的数据显示模块,若数据显示模块显示各类传感器采集的环境数据,则上位机通过通信模块与机器人建立远程连接成功;
25、3)上位机的远程操纵模块通过通信模块向控制器模块发送操纵指令,控制器模块根据操纵指令对机器人本体进行远程控制;
26、4)机器人本体巡检过程中,控制器模块通过通信模块采用融合sa算法与ga算法的遗传算法,将实时数据发送至上位机,以防止数据传输延迟。
27、所述步骤3),执行以下步骤:
28、3-1)巡检机器人上的进入矿洞根据操纵指令通过电机驱动模块控制机器人本体的位姿和机器人本体机械臂的动作;
29、3-2)导航定位模块实时对机器人本体进行定位,并将定位数据经控制器模块发送至上位机;
30、3-3)信息采集模块实时采集目标区域内的环境数据,并将环境数据通过通信模块回传至上位机;
31、3-4)图像识别模块实时拍摄目标区域的实时图像,并将图像分别发送至上位机,实现对目标区域内的实时监控;图像识别模块还将当前图像发送至存储模块存储,以用于通过控制器模块调用进行地图构建;
32、3-5)信息采集模块中的距离传感器实时监测巡检机器人与洞穴墙壁之间的距离数据,并存储至存储模块中;
33、3-6)控制机器人本体巡检完毕后,操控机器人返回原点,控制器模块调取存储模块中距离数据与环境数据进行地图构建,得到完整的矿洞建模图;
34、3-7)上位机获取矿洞各处的相应数据以及完整的矿洞建模图,并存储在数据存储模块,同时,通过数据诊断模块对环境数据与预设定的标准值进行对比,将出现不满足预设定标准值的标记在矿洞建模图中。
35、步骤3-6)中,所述控制器模块调取存储模块中距离数据与环境数据进行地图构建,得到完整的矿洞建模图,具体为:
36、(1)收集距离数据:控制器模块通过安装在移动机器人上的距离传感器获取矿洞内部的距离数据;
37、(2)收集环境数据:使用各类环境传感器获取矿洞内部的环境数据;所述环境数据,包括:温度、湿度、甲烷气体浓度信息;
38、(3)存储距离数据和环境数据:将所收集到的距离数据和环境数据存储在存储模块中;
39、(4)初始化地图:在控制器模块中创建一个初始地图,地图使用三维点云地图的表示方式;
40、(5)提取距离数据和环境数据:控制器模块从存储模块中提取距离数据和环境数据,以便进行地图构建,根据具体需求,选择提取所有的数据或者仅提取部分数据;
41、(6)数据预处理:对提取的距离数据和环境数据进行预处理;包括噪声去除、滤波、校准等步骤,以提高数据的准确性和可靠性;
42、(7)地图更新:使用预处理后的距离数据和环境数据,将其与初始地图进行融合或更新;通过扩展卡尔曼滤波器、粒子滤波器采用概率建图算法或其他地图构建方法来完成地图更新;
43、(8)地图优化:对构建的地图进行优化,以提高地图的质量和准确性;
44、所述地图优化,包括闭环检测、回环优化等技术,以修正由于传感器误差或不完整数据引起的地图漂移或错误;
45、(9)地图存储:将构建和优化后的地图存储在存储模块中,以便后续发送至上位机。
46、机器人本体巡检过程中,控制器模块通过通信模块采用融合sa算法与ga算法的遗传算法,将实时数据发送至上位机,具体为:
47、4-1)采用比二进制编码体现个体信息的实数编码对时间触发流进行调度;随机初始化m个数据字符串,并作为初始总体中的m个个体,最大迭代次数设为g;
48、在ga算法中是根据适应度进行评估,通过取不同个体的目标函数值的倒数形式,并增加一个常数项来控制数据字符串的个体之间的差距,即:
49、
50、其中,s为常数项,tn为目标函数值,f(x)是适应度函数,常数项越小,则该项中个体之间的适应度差距越小,以使差异有限的个体数据字符串可以生存下来,使种群多样化;
51、4-2)在操作中从m个数据字符串形成的群体中选择n个精英个体,并直接添加到下一代群体中;
52、4-3)从当前种群中选取个体进行交叉,概率为pc;子代被放入缓冲池;重复步骤4-3),直到缓冲池中有(m-n)个个体;
53、4-4)从缓冲池中选取突变概率为pm的个体,在metropolis准则下引入sa算法,在设定概率下接受新解,得到新一代群体p(t+1);
54、步骤4-4)中,所述在metropolis准则下引入sa算法,在设定概率下接受新解,得到新一代群体p(t+1),包括以下步骤:
55、(1)初始化参数:进化代gen=0,最大迭代次数g,种群规模m,交叉概率pc,突变概率pm,起始温度t0,终止温度tt,冷却速率δt;
56、(2)通过实编码生成初始种群pt;
57、(3)计算群体pt中每个个体的适应度f(xi),并确定最优个体;
58、(4)选择适应度值最高的n个精英个体,直接添加到下一代种群中;
59、(5)对剩余的(m-n)个个体分别以pc和pm的概率进行交叉和突变,并计算并比较所有个体的适应度值f(xi+1);
60、如果f(xi+1)>f(xi),则接受新的个体,并跳转到步骤(7)。
61、(6)ti=ti-δt,ti为当前的温度,δt为冷却速率,更新温度ti;如果ti>tt,执行步骤(5)。
62、(7)交叉突变后的(m-n)个个体与步骤(4)中n个精英个体结合,形成新群体p(t+1)。
63、(8)评估新群体p(t+1)中个体的适应度,并保存最优个体;
64、(9)判断算法是否满足收敛准则,如果满足,输出最优个体并终止算法;否则,重复执行步骤(4)~(9)。
65、在数据传输过程中,为最优的数据字符串添加特定的标识或标签,以便上位机能够识别并正确处理,在数据传输格式中定义一个字段或标记,表示该数据为最优的数据字符串;
66、为体现传输过程中排队延迟,在发送端和接收端都设置一个数据队列,用于存储待传输或待处理的数据;当数据准备好时,将其添加到发送端队列,并按照设定的速率从队列中取出数据进行传输,接收端也设置一个队列,用于按顺序接收和处理传输的数据。
67、本发明具有以下有益效果及优点:
68、1.本发明中多个模块均采用了tsn技术,使得在操控机器人的过程中,可以改善多种传感器进行数据采集的数据流与操控机器人移动的数据流产生的流量拥塞问题,做到了多业务统一承载,保证了数据传输的实时性、稳定性及可靠性的同时,节约了网络部署和运营的成本。
69、2.本发明在基于tsn协议上的数据传输过程中采用了改进的遗传算法,在局部搜索等方面优于遗传算法。改进的遗传算法在遗传操作产生的新个体进入下一代群体之前,如避免局部最优陷阱。
70、3.本发明改进的遗传算法结合了sa算法在全局并行搜索方面的优势和ga算法在局部串行搜索方面的优点,为解决tsn流量调度问题提供了一种有效的工具。
71、4.本发明通过设置信息采集模块,能够从矿洞温湿度、气体浓度、风力风向等方面对矿洞内的环境进行实时监测,且通过监测得到的数据传输给上位机软件,从而获取矿洞内实时信息的同时帮助操控人员调整操作,通过运用tsn技术,在传输高带宽、大流量的传感器流量的同时,保证机器人可以实时移动。
- 还没有人留言评论。精彩留言会获得点赞!