一种安防巡逻机器人的制作方法
本发明涉及安防巡逻设备,具体为一种安防巡逻机器人。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器。机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。近年来,随着智能机器人的应用领域的扩大,人们期望智能机器人在更多领域为人类服务,代替人类完成更复杂的工作。大量的工业机器人、军用机器人、服务机器人被开发应用,随着国民安全意识的不断提高,人们对自身安全防护意识越来越强。机器人正作为一支特殊力量参与到上述场所的巡逻安保工作中,并且得到了广泛的应用。
2、目前,现有的安防巡逻机器人在行走时,并不能进行保护,且容易出现摔倒的情况,导致安防巡逻机器人摔坏,造成经济损失,同时在行走时,遇到下雨结冰的路面,还会出现打滑的情况,使得机器人行走不顺畅,进而影响安防巡逻效果。
技术实现思路
1、为实现以上目的,本发明通过以下技术方案予以实现:一种安防巡逻机器人,包括:
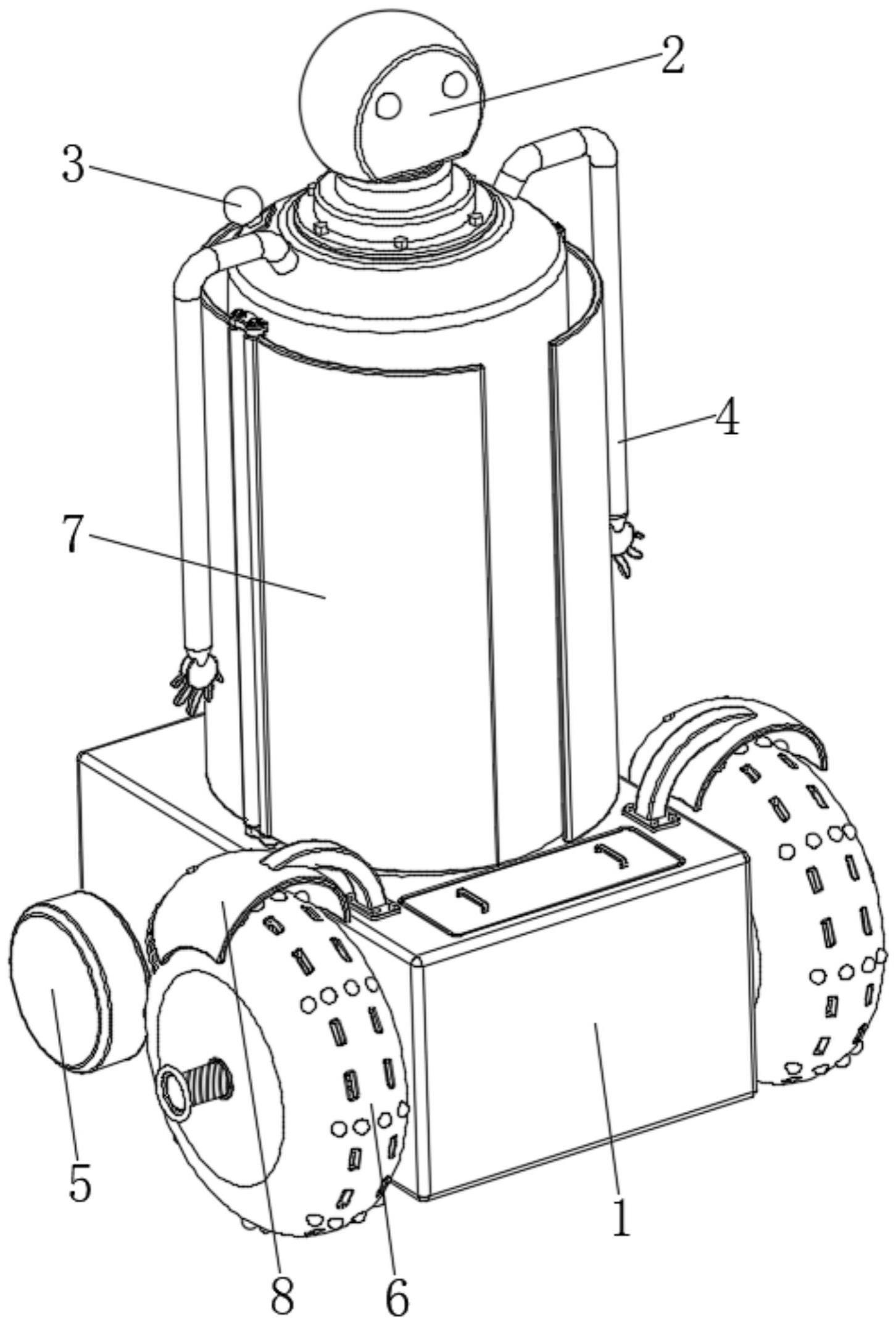
2、机体,该机体的顶部中央位置通过螺钉固定连接有监控摄像头,且所述机体的外表面顶部且靠近监控摄像头的位置安装有报警灯,且所述机体的外表面顶部且靠近报警灯的位置固定连接有防护手臂,且所述机体的外表面底部且靠近端部位置设置有从动轮;
3、还包括:
4、驱动器,该驱动器具有固定在机体内表面底部的动力机构,且所述动力机构的输出端且靠近机体外表面的位置固定连接有驱动轮,且所述驱动轮的外表面固定连接有摩擦凸点,且所述驱动轮的外表面且靠近摩擦凸点的位置开设有矩形通孔,且所述驱动轮的内表面且靠近矩形通孔的位置设置有防滑模块,且所述驱动轮的内部且靠近防滑模块的位置设置有顶压模块,利用动力机构作为动力,可将驱动轮带动进行转动,并结合从动轮的滚动,便可将整个设备进行移动安防巡逻,且当遇到雨天路面结冰时,此时设备的整体重量会施加到摩擦凸点上,并结合摩擦凸点的材料设置为橡胶材质,且摩擦凸点均匀分布在驱动轮的外表面上,此时受到设备重量的按压下,使得摩擦凸点进行塑性变形,并利用摩擦凸点自身具有防滑的效果,使得驱动轮不易出现打滑的情况,同时利用顶压模块与防滑模块之间相互作用,进而使得整体移动顺畅,便于安防巡逻;
5、防护组件,该防护组件具有转动连接在机体外表面顶部的防护板,以及固定在机体内表面的曲面弹性圈,且所述防护板的内表面固定连接有支撑导杆,且所述支撑导杆的外表面与机体的外表面滑动连接,且所述支撑导杆远离防护板的一端与曲面弹性圈的外表面贴合,且所述防护板的内表面且靠近支撑导杆的位置固定连接有弹力球,装置整体进行移动时,防护板起到了保护的效果,且防护板受到外力时,利用防护板与机体的外表面是转动连接,此时防护板在支撑导杆的导向作用下,使得防护板平稳转动,且弹力球受到压缩,进而对外力进行初步化解,同时支撑导杆在防护板的带动下,向机体内部进行转动时,不仅可对防护板进行支撑导向,还可以对曲面弹性圈进行压缩,并利用曲面弹性圈自身的弹力,并结合作用力与反作用力,进而使得支撑导杆受到缓冲,进而对结构整体起到了保护的作用,同时当设备整体倾倒后,防护手臂与机体形成了三角支撑,使得装置整体不会随意的滚动,再次实现保护。
6、优选的,所述摩擦凸点的材料设置为橡胶材质,所述摩擦凸点均匀分布在驱动轮的外表面,所述摩擦凸点均匀分布在驱动轮的外表面,所述摩擦凸点与矩形通孔交错排列。
7、优选的,所述防滑模块包括直角弹条,所述直角弹条的顶端与驱动轮的内表面且靠近矩形通孔的位置固定连接,所述直角弹条远离驱动轮内表面的一端固定连接有弧形基块,所述弧形基块的外表面且远离直角弹条的一侧固定连接有受力齿,所述受力齿远离弧形基块的一端固定连接有接触件,所述弧形基块的外表面且靠近直角弹条的一侧固定连接有延伸齿,当顶压模块的外表面端部与接触件的外表面接触后,使得接触件受到向外侧的顶动力,此时受力齿将顶动力通过弧形基块施加到直角弹条上,此时受到顶动力的直角弹条被压缩进行弹性变形,且弧形基块带动延伸齿向靠近驱动轮内表面的一侧移动,使得延伸齿从矩形通孔处穿过,并延伸至驱动轮的外部,当驱动轮滚动时,此时延伸至外部的延伸齿端部与地面接触,进而减小受到结冰地面的影响。
8、优选的,所述弧形基块均匀分布在驱动轮的内部,所述受力齿设置为弧形,所述接触件的外表面设置为弧形面。
9、优选的,所述弧形基块的外表面开设有与直角弹条相适配的凹槽,所述延伸齿设置为弧形,所述延伸齿均匀分布在弧形基块的外表面且靠近直角弹条的一侧。
10、优选的,所述顶压模块包括螺纹丝杆,所述螺纹丝杆的外表面与驱动轮的外表面中央位置螺纹连接,所述螺纹丝杆的外表面端部贯穿驱动轮的外表面并延伸至内部,所述螺纹丝杆延伸至驱动轮内部的一端固定连接有顶压盘,所述顶压盘的外表面且靠近防滑模块的一侧开设有锥形面,所述锥形面的外表面滚动连接有滚珠,当拧动螺纹丝杆时,并结合螺纹丝杆的外表面与驱动轮的外表面中央位置螺纹连接,使得螺纹丝杆带动顶压盘下向靠近接触件的一侧移动,并结合接触件的外表面为弧形,且利用锥形面对接触件进行顶压,进而便于对接触件施加顶动力,同时利用滚珠的外表面与接触件的外表面接触,且在顶压盘的转动下,使得滚珠进行滚动,进而通过滚珠的滚动,减小接触件与锥形面之间的摩擦力,使得结构之间运行顺畅,不易出现卡涩的情况。
11、优选的,所述驱动轮的外表面中央位置开设有与螺纹丝杆的外表面相适配的内螺纹,所述锥形面的外表面开设有与滚珠相适配的滚动槽。
12、优选的,所述防护板的外表面设置弧形,所述机体的外表面开设有支撑导杆穿过的穿孔,所述弹力球的材料设置为橡胶材质。
13、优选的,所述机体的外表面底部且靠近驱动轮的位置设置有清理模块,所述清理模块包括连接支架,所述连接支架的底端通过螺钉与机体的外表面底部且靠近驱动轮的位置固定连接,所述连接支架的顶端固定连有罩壳,所述罩壳的外表面端部固定连接有清洁刷,所述罩壳的内表面且靠近矩形通孔的位置固定连接有刀片,当驱动轮滚动时,利用清洁刷底端与驱动轮的外表面贴合,可对驱动轮外表面黏粘的杂物进行刷除,减少杂物附着,同时当延伸齿在滚动时,延伸齿从相邻两个刀片之间空隙处穿过,此时刀片可将延伸齿上缠绕的丝带状杂物进行割断处理,减少杂物的缠绕,且刀片的底端处在相邻两个摩擦凸点之间,不会对摩擦凸点造成损坏。
14、优选的,所述清洁刷远离罩壳的一端与驱动轮的外表面贴合,所述刀片设置为弧形。
15、本发明提供了一种安防巡逻机器人。具备以下有益效果:
16、一、该安防巡逻机器人,利用动力机构将驱动轮带动进行转动,并结合从动轮的滚动,便可将整个设备进行移动安防巡逻,且当遇到雨天路面结冰时,此时设备的整体重量会施加到摩擦凸点上,此时受到设备重量的按压下,使得摩擦凸点进行塑性变形,并利用摩擦凸点自身具有防滑的效果,使得驱动轮不易出现打滑的情况,同时利用顶压模块与防滑模块之间相互作用,进而使得整体移动顺畅,便于安防巡逻。
17、二、该安防巡逻机器人,当顶压模块的外表面端部与接触件的外表面接触后,使得接触件受到向外侧的顶动力,此时受力齿将顶动力通过弧形基块施加到直角弹条上,此时弧形基块带动延伸齿向靠近驱动轮内表面的一侧移动,使得延伸齿从矩形通孔处穿过,并延伸至驱动轮的外部,当驱动轮滚动时,此时延伸至外部的延伸齿端部与地面接触,进而减小受到结冰地面的影响。
18、三、该安防巡逻机器人,当拧动螺纹丝杆时,使得螺纹丝杆带动顶压盘下向靠近接触件的一侧移动,且利用锥形面对接触件进行顶压,进而便于对接触件施加顶动力,同时利用滚珠的外表面与接触件的外表面接触,且在顶压盘的转动下,使得滚珠进行滚动,进而通过滚珠的滚动,减小接触件与锥形面之间的摩擦力,使得结构之间运行顺畅,不易出现卡涩的情况。
19、四、该安防巡逻机器人,防护板起到了保护的效果,且防护板受到外力时,防护板在支撑导杆的导向作用下,使得防护板平稳转动,且弹力球受到压缩,进而对外力进行初步化解,同时支撑导杆不仅可对防护板进行支撑导向,还可以对曲面弹性圈进行压缩,并利用曲面弹性圈自身的弹力,并结合作用力与反作用力,进而使得支撑导杆受到缓冲,进而对结构整体起到了保护的作用。
20、五、该安防巡逻机器人,当驱动轮滚动时,可对驱动轮外表面黏粘的杂物进行刷除,减少杂物附着,同时当延伸齿在滚动时,延伸齿从相邻两个刀片之间空隙处穿过,此时刀片可将延伸齿上缠绕的丝带状杂物进行割断处理,减少杂物的缠绕,且刀片的底端处在相邻两个摩擦凸点之间,不会对摩擦凸点造成损坏。
- 还没有人留言评论。精彩留言会获得点赞!