一种同轴绳驱机器人的空间双圆弧规划方法及系统、计算机存储介质
本发明涉及机器人控制领域,尤其是一种同轴绳驱机器人规划方法及系统、计算机存储介质。
背景技术:
1、在同轴绳驱机器人中机器人本体与驱动组件是分开的。因此机器人本体可以小型化,便于在受限的空间中应用。同轴绳驱机器人在实际医疗应用中运动速度较慢,确定逆运动学的问题可以转换为求解准静态逆运动学的问题。
2、首先,对于特定的位置和方向,同轴绳驱机器人要想获得一组在受限的三维空间中合理运动的关节角度是极其复杂和具有挑战的。hirose等人提出了曲线来模拟在平面上运动的蛇的构型,目的是有效地实现蛇形机器人的运动。杨等人提出了稀疏伪和基于关节极限的雅可比方法来解决主从式蛇形机器人的实时遥操作问题。liu等人提出了一种基于迭代雅可比矩阵的方法,通过考虑雅可比矩阵的逆矩阵和阻尼最小二乘法来确定可控血管内导管系统的配置。逆运动学的结果是一个迭代解,这种方法也可以避免数值不稳定的问题。高等人提出了一种绳牵引多节机器人的运动学模型,以实现其跟随引导者运动。推拉索控制机器人的验证实验表明了跟随引导运动的准确性。为了改善操作中的运动学性能,张等人提出了一种考虑基于雅可比的逆运动学和基于预测的约束施加的运动学框架来控制手术机械手。在远端位置和每段长度已知的情况下,neppalli等人提出了一个封闭形式的逆解。但是,每个部分的合理长度也是需要在中优化的值。一般,因为对于多截面连续体,可以通过多种方式到达期望的位置。李等人提出了一种逆运动学求解方法,假设多段连续体机器人各段相等。该方法可以求解期望末端位置的逆运动学,但不能考虑多段连续体机器人的末端方向和构型。mu提出了一种求解同轴绳驱动机械手逆运动学的双圆弧方法。在该方法中,通常使用的末端位置、末端方向和机械手的配置被视为变量。因此,该方法可以同时控制机械手的末端位置、末端方向和姿态。但是,它只能求解平面内同轴绳驱动机械手的逆运动学。
3、现有方法只能部分解决机械手特定构型的逆运动学和构型规划问题。一些学者用几何方法处理平面。这些方法不能直接用于3d情况。而一些学者通过引入数值方法来处理3d情况。对于3d情况,这些方法总是计算量大。
4、另外,现有的绳驱机器人规划方法主要针对平面,对于同轴绳驱机器人在三维空间的规划方法研究较少,并不能满足同轴绳驱机器人在三维空间的轨迹规划需求。为解决同轴绳驱机器人在三维有限空间中的规划问题,该技术有必要进行改进。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的一个目的是提供一种同轴绳驱机器人空间双圆弧规划方法及系统、计算机存储介质,用于实现同轴绳驱机器人的规划处理。
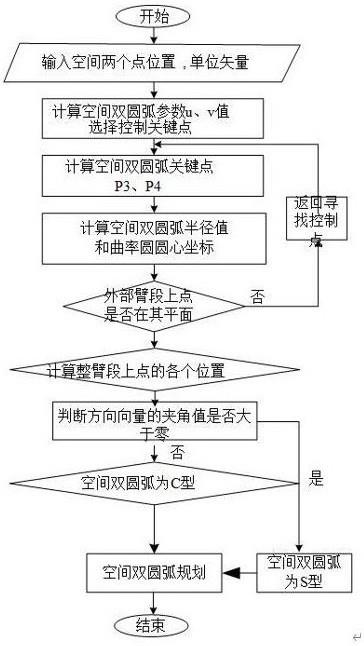
2、本发明采用的技术方案是:一种同轴绳驱机器人的规划方法,包括以下步骤:
3、将三维空间中的同轴绳驱机器人使用空间双圆弧理论进行运动学建模;
4、基于所建运动学模型,将所述同轴绳驱机器人周围运动学空间分为相互之间映射关系的驱动空间(电机角度-绳索长度)、构型空间(关节-角度)、任务空间(末端-位置);
5、实时检测所述同轴绳驱机器人方向向量之间的夹角值;
6、判断所述同轴绳驱机器人方向向量之间的夹角值是否大于零,若判断结果为是,判断所述同轴绳驱机器人的空间构型为“s”型;
7、对所述同轴绳驱机器人进行规划处理,计算同轴绳驱机器人整臂曲率圆圆心位置;
8、实时检测同轴绳驱机器人整臂的实际弧段长度;
9、判断所述同轴绳驱机器人外部绳驱机构上的点到圆心点的距离是否等于初始圆半径,若判断结果为是,判断所述同轴绳驱机器人方法规划成功。
10、进一步地,所述同轴绳驱机器人的内外段绳驱臂段等效为空间相交一点,且在交点处有共同切线的两段空间圆弧,用以保证同轴绳驱机器人的臂段以期望的空间位置到达指定的目标处。
11、进一步地,判断所述同轴绳驱机器人的空间坐标系与另一空间坐标系之间的圆弧长度是否为脊线的整数倍,若判断结果为是,判断所述同轴绳驱机器人在圆弧长度上为非连续变化,在两段圆弧构型对空间双圆弧逆向拟合。
12、进一步地,判断所述同轴绳驱机器人的末端不同指向值是否满足整臂在工作时所需的刚度,若判断结果为是,判断所述同轴绳驱机器人的整臂灵活性很好,以达到整臂的期望工作要求。
13、本发明所采用的另一技术方案是:一种同轴绳驱机器人的空间双圆弧轨迹规划系统,包括:
14、建模单元,用于将三维空间中的同轴绳驱机器人使用空间双圆弧理论进行运动学建模;
15、空间划分单元,用于基于所建运动学模型,将所述同轴绳驱机器人周围运动学空间分为相互之间映射关系的驱动空间(电机角度-绳索长度)、构型空间(关节-角度)、任务空间(末端-位置);
16、角度检测单元,用于检测所述同轴绳驱机器人方向向量之间的夹角值;
17、构型单元,用于判断所述同轴绳驱机器人方向向量之间的夹角值是否大于零,若判断结果为是,判断所述同轴绳驱机器人的空间构型为“s”型;
18、规划单元,用于对所述同轴绳驱机器人进行规划处理;
19、规划结果判断单元,用于判断所述同轴绳驱机器人外部绳驱机构上的点到圆心点的距离是否等于初始圆半径,若判断结果为是,判断所述同轴绳驱机器人方法规划成功。
20、进一步地,所述同轴绳驱机器人的内外段绳驱臂段等效为空间相交一点,且在交点处有共同切线的两段空间圆弧,用以保证同轴绳驱机器人的臂段以期望的空间位置到达指定的目标处。
21、进一步地,判断所述同轴绳驱机器人的空间坐标系与另一空间坐标系之间的圆弧长度是否为脊线的整数倍,若判断结果为是,判断所述同轴绳驱机器人在圆弧长度上为非连续变化,在两段圆弧构型对空间双圆弧逆向拟合。
22、进一步地,判断所述同轴绳驱机器人的末端不同指向值是否满足整臂在工作时所需的刚度,若判断结果为是,判断所述同轴绳驱机器人的整臂灵活性很好,以达到整臂的期望工作要求。
23、本发明所采用的另一技术方案是:一种计算机存储介质,其上存储有计算机程序,所述程序被处理器执行时实现以下步骤:
24、将三维空间中的同轴绳驱机器人使用空间双圆弧理论进行运动学建模;
25、基于所建运动学模型,将所述同轴绳驱机器人周围运动学空间分为相互之间映射关系的驱动空间(电机角度-绳索长度)、构型空间(关节-角度)、任务空间(末端-位置);
26、实时检测所述同轴绳驱机器人方向向量之间的夹角值;
27、判断所述同轴绳驱机器人方向向量之间的夹角值是否大于零,若判断结果为是,判断所述同轴绳驱机器人的空间构型为“s”型;
28、对所述同轴绳驱机器人进行规划处理,计算同轴绳驱机器人整臂曲率圆圆心位置;
29、实时检测同轴绳驱机器人整臂的实际弧段长度;
30、判断所述同轴绳驱机器人外部绳驱机构上的点到圆心点的距离是否等于初始圆半径,若判断结果为是,判断所述同轴绳驱机器人方法规划成功。
31、本发明的有益效果是:
32、本发明一种同轴绳驱机器人规划方法及系统、计算机存储介质,将三维空间中的同轴绳驱机器人使用空间双圆弧理论进行运动学建模;基于所建运动学模型,将所述同轴绳驱机器人周围运动学空间分为相互之间映射关系的驱动空间(电机角度-绳索长度)、构型空间(关节-角度)、任务空间(末端-位置);实时检测所述同轴绳驱机器人方向向量之间的夹角值;判断所述同轴绳驱机器人方向向量之间的夹角值是否大于零,若判断结果为是,判断所述同轴绳驱机器人的空间构型为“s”型;对所述同轴绳驱机器人进行规划处理;判断所述同轴绳驱机器人外部绳驱机构上的点到圆心点的距离是否等于初始圆半径,若判断结果为是,判断所述同轴绳驱机器人方法规划成功。所述同轴绳驱机器人的内外段绳驱臂段等效为空间相交一点,且在交点处有共同切线的两段空间圆弧,用以保证同轴绳驱机器人的臂段以期望的空间位置到达指定的目标处;实现了对同轴绳驱机器人的规划需求、规划结果检测,完成了同轴绳驱机器人的轨迹规划。
- 还没有人留言评论。精彩留言会获得点赞!