一种形态与关节刚度可调整的仿人多指手
本发明涉及机器人,尤其是指一种形态与关节刚度可调整的仿人多指手。
背景技术:
1、机器人灵巧手是一种仿人手的末端执行器,它的外形类似于人手,可替代人操作有危险或者根本完成不了的操作,从结构方式上分为驱动器外置式机器人多指灵巧手,驱动器内置机器人多指灵巧手,外置式机器人多指灵巧手不用考虑体积空间,可以用更大的驱动电机来增加手指的输出力,手指也可以做到比较纤细,但也存在传感器不能反应关节信息,控制器难度大,标定难,非模块化设计,可维护性差等问题。相应的,驱动内置式的优势是传动元件少,集成度高,因而机械可靠性更高,但有限的空间内设计的难度大,尤其单指具有四个主动自由度的全驱动灵巧手。
2、现有的机器人灵巧手无法同时满足关节刚度与以及整手形态的调节,特别是在刚度控制上,尚未实现各个指节的单独控制,而机器人灵巧手在实现人手操作能力,包括握、捏、托、扭、拧、撕、推、抓、刮、拨、压、挖、弹、鼓掌、夹、穿、抹、拍、摇等动作时,通常需要设置不同指节不同刚度,比如捏的动作需要大拇指中部关节和食指上部关节刚度强,其他的关节不需要强刚度;握取物品需要中部关节较大的刚度,上部关节和下部关节则不需要;进行连贯操作的,各关节还需要根据任务的执行变换刚度来完成任务。
技术实现思路
1、本发明的目的是为了解决机器人灵巧手不能调节各个指节刚度以及整手形态的缺点而提出的一种形态与关节刚度可调整的仿人多指手,且关键部位采用模块化设计,利于维护和安装以及扩展设计。
2、为实现上述目的,本发明采用了如下技术方案:
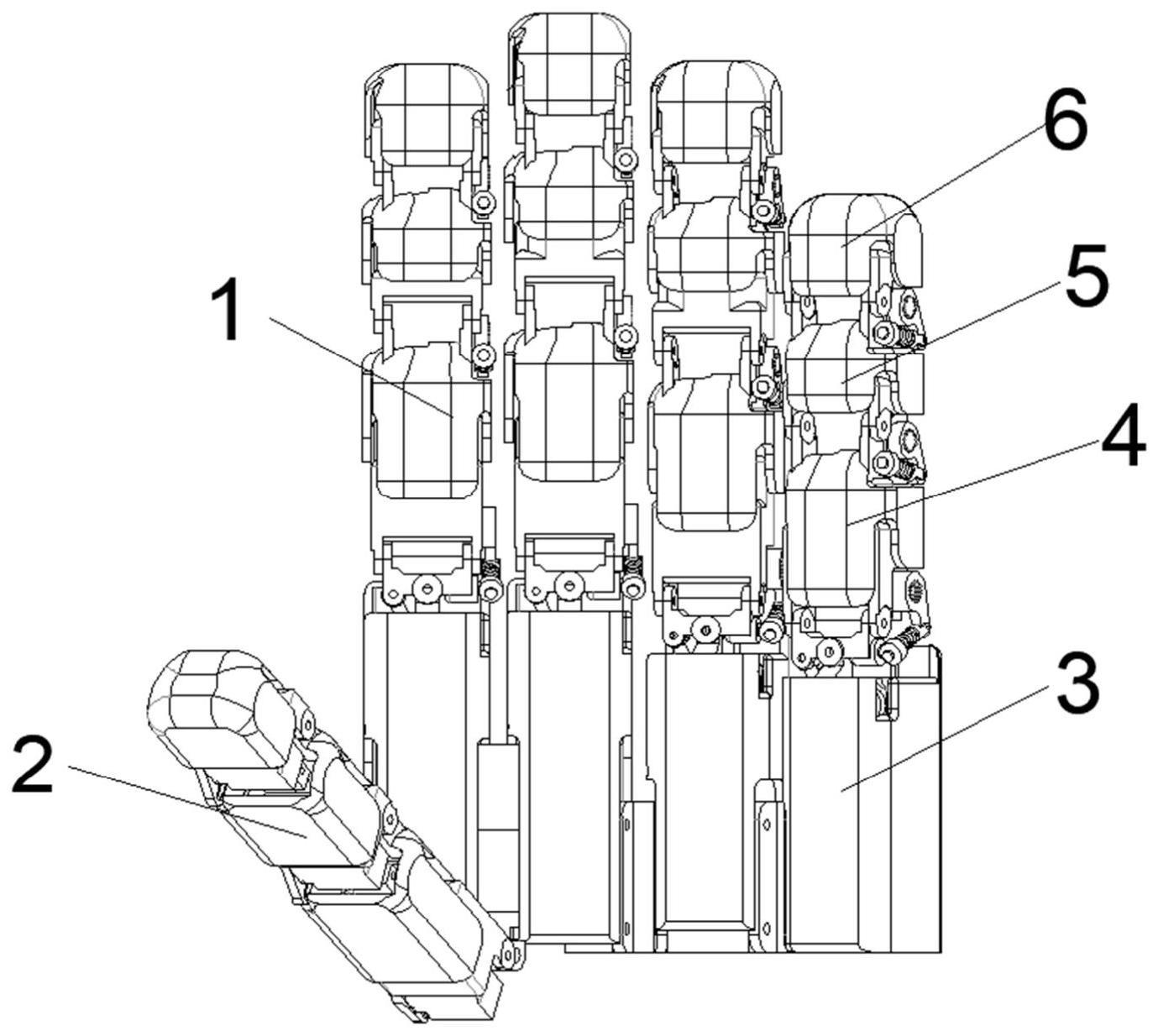
3、一种形态与关节刚度可调整的仿人多指手,包括掌骨部分以及与掌骨部分连接可以调节安装位置的四指部分,所述掌骨部分滑动连接有拇指部分,所述四指部分的每个手指结构和拇指部分的手指结构都包括远端指节、中间指节、近端指节,所述远端指节、中间指节、近端指节分别包括指节支架以及滑动连接在指节支架外部的指节外壳;
4、所述指节支架套接有弹性屈伸关节机构,所述远端指节的指节支架铰接中间指节的指节外壳且远端指节的弹性屈伸关节机构插接于中间指节的指节外壳,所述中间指节的指节支架铰接近端指节的指节外壳且中间指节的弹性屈伸关节机构插接于近端指节的指节外壳,所述弹性屈伸关节机构用于控制远端指节、中间指节的屈伸。
5、作为本发明再进一步的方案:所述弹性屈伸关节机构包括屈伸电机和屈伸曲柄,所述屈伸电机套接在指节支架内,所述屈伸电机一侧与屈伸曲柄的曲轴端固定连接,所述屈伸曲柄的曲杆末端铰接有屈伸u型支架,所述屈伸u型支架螺纹连接有屈伸连杆,所述屈伸连杆靠近屈伸u型支架端螺纹连接有调刚度螺母,所述屈伸连杆的另一端螺纹连接有杆端关节,所述屈伸连杆还套接有刚度弹簧,所述刚度弹簧一端连接调刚度螺母,另一端连接杆端关节,所述杆端关节插接于指节外壳内部。
6、作为本发明再进一步的方案:所述四指部分的近端指节的弹性屈伸关节机构通过杆端关节插接有第一十字轴,所述拇指部分的近端指节的弹性屈伸关节机构通过杆端关节插接有第二十字轴。
7、作为本发明再进一步的方案:所述四指部分的每个手指结构还包括铰接在第一十字轴另一侧的侧摆关节机构,所述侧摆关节机构包括侧摆电机以及固定在侧摆电机一侧的侧摆曲柄,所述侧摆曲柄的曲杆末端铰接有侧摆u型支架,所述侧摆u型支架螺纹连接有侧摆连杆,所述侧摆连杆的另一端与第一十字轴铰接。
8、作为本发明再进一步的方案:所述指节支架内设有滑槽,所述指节外壳内固设有滑块,所述滑块沿轴向与所述滑槽滑动配合,所述滑槽侧边设有滑槽顶丝孔,所述滑槽顶丝孔内部插有滑槽顶丝,通过滑槽顶丝对滑块进行固定。
9、作为本发明再进一步的方案:所述掌骨部分包括小指掌骨基座、无名指掌骨基座、中指掌骨基座、食指掌骨基座、掌骨挡板和阻尼铰链,所述小指掌骨基座通过阻尼铰链与无名指掌骨基座连接,所述无名指掌骨基座通过阻尼铰链与中指掌骨基座连接,所述中指掌骨基座与食指掌骨基座固定连接,每个所述第一十字轴中部固定连接在掌骨挡板的顶部,每个所述掌骨挡板侧边纵轴中部设有掌骨顶丝孔,所述掌骨顶丝孔内插有掌骨顶丝。
10、作为本发明再进一步的方案:所述四指部分分别指食指、中指、无名指、小指,所述四指部分的手指结构分别通过掌骨挡板与对应名称的掌骨基座连接,通过掌骨顶丝把掌骨挡板固定在掌骨基座上。
11、作为本发明再进一步的方案:所述中指掌骨基座、食指掌骨基座底部设有大拇指滑槽,所述拇指部分底部设有大拇指滑块,所述大拇指滑槽与所述大拇指滑块滑动配合,所述食指掌骨基座背部设有大拇指顶丝孔,所述大拇指顶丝孔内部插有大拇指顶丝,所述大拇指滑槽移动至某一位置后,通过大拇指顶丝进行固定,所述大拇指滑块底部固定连接有转动柱,所述拇指部分的第二十字轴和转动柱转动连接。
12、作为本发明再进一步的方案:所述掌骨部分固定连接有电路板,所述电路板上设置仿人多指手总成mcu,所述四指部分和所述拇指部分的每个手指结构上都集成有控制手指结构的的手指mcu,所述总成mcu与所述手指mcu是通过spi来实现一主多从的控制,所述手指mcu电性连接每个手指结构上的屈伸电机、侧摆电机,通过电流传感器获取手指四个屈伸电机电流,并通过pwm输出四通道的屈伸电机控制量。
13、综上所述,本发明的一种形态与关节刚度可调整的仿人多指手具有以下优点:
14、四指部分、拇指部分的每个指节结构都使用弹性屈伸关节机构,关节刚度越高,控制精度高,顺应性越弱,反之则顺应性强,控制精度低,可变的关节刚度可以让整只手模仿人的更多精细动作,不限于握、捏、托、扭、拧、撕、推、抓、刮、拨、压、挖、弹、鼓掌、夹、穿、抹、拍、摇等动作,全面提升全驱动灵巧手面对不同场合的适应能力;
15、四指部分的手指结构设置了侧摆关节机构,可以控制四指部分左右运动;指节外壳内固定连接滑块,指节支架设置滑槽,滑块滑槽滑动配合实现每个指节的长度调整;中指掌骨基座、食指掌骨基座底部设有大拇指滑槽,大拇指滑槽与拇指部分的大拇指滑块滑动配合,通过顶丝固定,可以调节拇指部分的安装位置;四指部分第一十字轴中部固定连接掌骨挡板,掌骨挡板可以沿掌骨基座纵向运动,掌骨挡板与对应的掌骨基座通过顶丝固定,从而可以调节四指部分的每个手指结构的安装位置;掌骨部分的掌骨基座通过阻尼铰链连接,可以调整手掌的曲率。每个指节长度、每个手指(包括拇指)的安装位置、手掌的曲率都可以调整,通过调整四指部分的安装位置以及指节长度,从而形成类似于人手的手指高低分布,实现了与仿人手的尺寸一致的灵巧手,可以有效地抓取人类环境中的物体。
16、拇指部分滑动底部固定连接有转动柱,拇指部分的第二十字轴与转动柱转动连接,可以实现拇指的转动,改变拇指的方位,因此大拇指不仅可以屈伸还可以转动,自由度高,实现了对掌抓取。
17、食指,中指,无名指,小指都是由结构完全一样的模块化手指组成,可以相互替换,又能根据手指实际工况的差异,进一步,四指部分和拇指部分对应的指节结构也是采用相同的结构,设计通用,便于维护和安装。
- 还没有人留言评论。精彩留言会获得点赞!