无芯基板的分板方法、分板设备和存储介质与流程
本技术涉及电子,特别涉及一种无芯基板的分板方法、分板设备和存储介质。
背景技术:
1、当前电子封装技术的发展趋势是集中追求更高的电气性能与更小的三维尺寸。电子产品的薄型化趋势对基板也要求越来越薄,无芯基板是具有广泛应用前景的下一代封装基板技术。无芯基板也叫无核基板,是去除了芯板的封装基板,它仅保留如树脂、半固化片等的绝缘层和铜层,通过半加成工艺实现高密度布线。
2、应用无芯基板面临的最大挑战之一就是翘曲问题。翘曲和残余应力的数值大小取决于材料间机械性能不匹配度、基板的三维尺寸与结构、固化条件、层压结构的非对称性、电路图案等。在无芯基板的制作过程中,需要将无芯基板与承载板之间进行分拆处理,而在相关技术中,分拆步骤主要通过技术人工通过手工的方式进行拆板处理,工作效率低,而且每次拆板的力度和平衡度都难以统一,容易破坏无芯基板的铜面。
技术实现思路
1、本技术旨在至少解决现有技术中存在的技术问题之一。为此,本技术提出一种无芯基板的分板方法、分板设备和存储介质,能够有效将无芯基板与承载板分离,并不会破坏无芯基板的铜面。
2、第一方面,本技术实施例提供了一种无芯基板的分板方法,应用于分板设备,所述分板设备包括定位模块、固定模块、吸附模块、切刀模块以及拉线模块,所述分板方法包括:
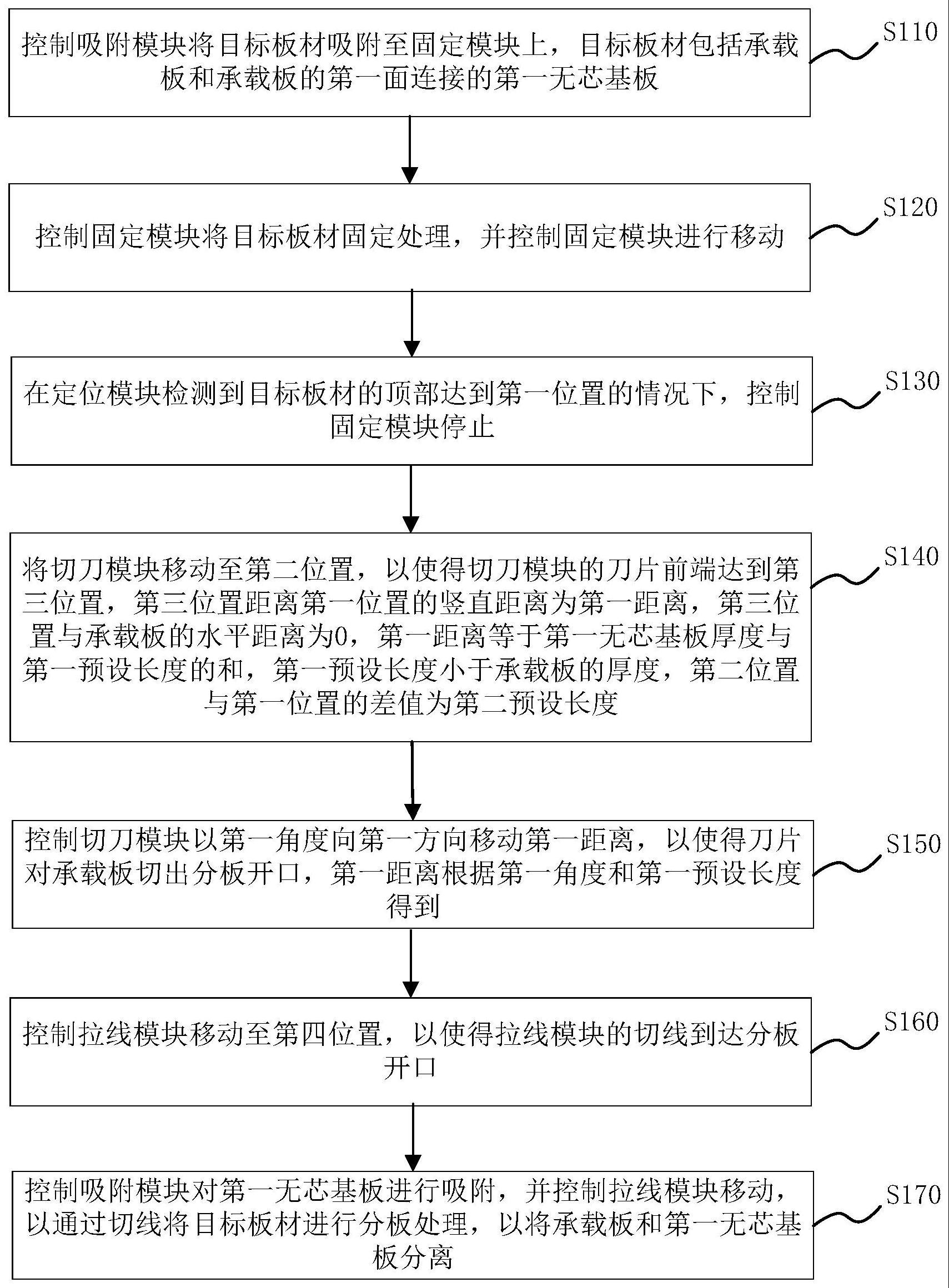
3、控制所述吸附模块将目标板材吸附至所述固定模块上,所述目标板材包括承载板和所述承载板的第一面连接的第一无芯基板;
4、控制所述固定模块将所述目标板材固定处理,并控制所述固定模块进行移动;
5、在所述定位模块检测到所述目标板材的顶部达到第一位置的情况下,控制所述固定模块停止;
6、将所述切刀模块移动至第二位置,以使得所述切刀模块的刀片前端达到第三位置,所述第三位置距离所述第一位置的竖直距离为第一距离,所述第三位置与所述承载板的水平距离为0,所述第一距离等于所述第一无芯基板厚度与第一预设长度的和,所述第一预设长度小于所述承载板的厚度,所述第二位置与所述第一位置的差值为第二预设长度;
7、控制所述切刀模块以第一角度向第一方向移动第一距离,以使得所述刀片对所述承载板切出分板开口,所述第一距离根据所述第一角度和所述第一预设长度得到;
8、控制所述拉线模块移动至第四位置,以使得所述拉线模块的切线到达所述分板开口;
9、控制所述吸附模块对所述第一无芯基板进行吸附,并控制所述拉线模块移动,以通过所述切线将所述目标板材进行分板处理,以将所述承载板和所述第一无芯基板分离。
10、在一些实施例中,所述分板设备还包括毛刷模块,所述控制所述切刀模块以第一角度向第一方向移动第一距离,以使得所述刀片对所述承载板切出分板开口,包括:
11、控制所述切刀模块以第一角度向第一方向移动第一距离,以通过所述刀片对所述承载板切出刀痕;
12、控制所述切刀模块以第一角度向第二方向移动第二距离,以使得所述刀片离开所述承载板,所述第二方向为所述第一方向的反方向;
13、控制所述毛刷模块移动至第五位置,并控制所述毛刷模块沿所述刀痕对所述承载板进行剔除处理,以在所述承载板上形成分板开口。
14、在一些实施例中,所述分板设备还包括吹风模块,所述控制所述吸附模块对所述第一无芯基板进行吸附,并控制所述拉线模块移动,包括:
15、控制所述吸附模块对所述第一无芯基板进行吸附;
16、控制所述拉线模块移动以使得所述切线从所述分板开口开始向所述目标板材的内部方向进行水平移动,同时控制吹风模块向所述切线的运动方向吹风,以通过所述切线将所述目标板材进行分板处理。
17、在一些实施例中,所述控制所述拉线模块移动至第四位置,以使得所述拉线模块的切线到达所述分板开口,包括:
18、控制所述拉线模块移动至第四位置,以使所述拉线模块的切线到达第五位置,所述第五位置低于所述第三位置且到达所述分板开口。
19、在一些实施例中,所述固定模块包括升降单元、与所述升降单元连接的底板以及设置在所述底板四周的台阶结构,所述台阶结构的高度小于所述承载板的厚度,所述控制所述固定模块将所述目标板材固定处理,并控制所述固定模块进行移动,包括:
20、控制所述固定模块的台阶结构对放置在所述底板上的所述目标板材固定夹紧处理;
21、控制所述升降单元向所述第一位置进行移动。
22、在一些实施例中,所述台阶结构包括第一台阶、第二台阶、第三台阶和第四台阶,所述第一台阶、所述第二台阶、所述第三台阶和所述第四台阶上设置有压力检测单元,所述第一台阶、所述第二台阶、所述第三台阶和所述第四台阶所形成的矩形的长与宽均大于所述目标板材的长与宽,所述控制所述固定模块的台阶结构对放置在所述底板上的所述目标板材固定夹紧处理,包括:
23、所述第一台阶与所述第二台阶固定不动,分别控制所述第三台阶和所述第四台阶移动,以使得所述目标板材向所述第一台阶与所述第二台阶靠近;
24、在所述第一台阶、所述第二台阶、所述第三台阶和所述第四台阶上设置有压力检测单元所检测到的压力达到预设压力时,控制所述第三台阶和所述第四台阶停止移动。
25、在一些实施例中,所述目标板材还包括与承载板的第二面固定连接的第二无芯基板,所述分板设备还包括翻板模块,所述方法还包括:
26、控制所述翻板模块将与所述第一无芯基板分离后的所述目标板材进行翻板处理,并将翻板后的所述目标板材放置在所述固定模块上;
27、控制所述固定模块将所述目标板材固定处理,并控制所述固定模块进行移动;
28、在所述定位模块检测到所述目标板材的顶部达到第一位置的情况下,控制所述固定模块停止;
29、将所述切刀模块移动至第二位置,以使得所述切刀模块的刀片前端达到第三位置,所述第三位置距离所述第一位置的竖直距离为第一距离,所述第三位置与所述承载板的水平距离为0,所述第一距离等于所述第二无芯基板厚度与第一预设长度的和,所述第一预设长度小于所述承载板的厚度,所述第二位置与所述第一位置的差值为第二预设长度;
30、控制所述切刀模块以第一角度向第一方向移动第一距离,以使得所述刀片对所述承载板切出分板开口,所述第一距离根据所述第一角度和所述第一预设长度得到;
31、控制所述拉线模块移动至第四位置,以使得所述拉线模块的切线到达所述分板开口;
32、控制所述吸附模块对所述第二无芯基板进行吸附,并控制所述拉线模块移动,以通过所述切线将所述目标板材进行分板处理,以将所述承载板和所述第二无芯基板分离。
33、在一些实施例中,所述分板设备还包括图像传感器,所述控制所述吸附模块将目标板材吸附至所述固定模块上之后,所述方法还包括:
34、控制图像传感器对所述目标板材的正侧面进行拍照,得到第一照片;
35、对所述第一照片中所述目标板材进行识别处理,得到所述目标板材的侧面图;
36、将所述目标板材的侧面图与预设的侧面图像模板进行对比处理,得到对比结果;
37、在所述对比结果符合预设条件的情况下,确定所述目标板材符合后续的处理步骤。
38、第二方面,本技术实施例提供了一种分板设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述第一方面的无芯基板的分板方法。
39、第三方面,本技术实施例提供了一种计算机可读存储介质,存储有计算机可执行指令,所述计算机可执行指令用于执行如上述第一方面的无芯基板的分板方法。
40、根据本技术实施例的技术方案,至少具有如下有益效果:首先,控制吸附模块将目标板材吸附至固定模块上,其中,目标板材包括承载板和承载板的第一面连接的第一无芯基板;然后控制固定模块将目标板材固定处理,并控制固定模块进行移动,在定位模块检测到目标板材的顶部达到第一位置的情况下,控制固定模块停止;接着,将切刀模块移动至第二位置,以使得切刀模块的刀片前端达到第三位置;再控制切刀模块以第一角度向第一方向移动第一距离,以使得刀片对承载板切出分板开口,第一距离根据第一角度和第一预设长度得到;然后再控制拉线模块移动至第四位置,以使得拉线模块的切线到达分板开口;最后控制吸附模块对第一无芯基板进行吸附,并控制拉线模块移动,以通过切线将目标板材进行分板处理,以将承载板和第一无芯基板分离。由于本技术实施例在通过自动化设备对目标板材进行分板处理,在分板处理过程中通过定位模块确定目标板材处理前初始位置,然后经过精准的行程计算控制各个模块移动的位置,以通过刀片对承载板切出分板开口,再通过切线对从分板开口为起点对目标板材中的承载板与第一无芯基板之间的路径进行移动,从而能够通过切线有效将无芯基板与承载板进行分离处理,而且在分离过程中不会破坏无芯基板的铜面。
41、本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!