一种手术机器人高精度自动手眼标定方法及系统与流程
本发明涉及机械标定方法,尤其涉及一种手术机器人高精度自动手眼标定方法及系统。
背景技术:
1、在自主式口腔种植牙系统中,术前配准阶段需要将机械人坐标系与光学跟踪定位仪坐标系进行坐标系转换,以便在手术导航过程中机械臂根据光学跟踪定位仪提供的靶标信息,确定种植位姿。因此,机器人末端执行器和光学跟踪定位仪之间手眼标定精度直接影响手术机器人工作精度。
2、现阶段,手眼标定算法主要分为两类解析解和迭代解,无论是基于解析解的方法,采用tasi算法、svd奇异值分解算法等求解的解析解,还是基于迭代数值优化算法,采用最小二乘法、lm算法等求解手眼标定方程数值解,这些方法都是属于离线标定方法,采集数据和计算标定矩阵分为两个步骤,从而手眼标定矩阵的准确性直接依赖于采集数据的质量好坏,导致标定的精确度不高,效率低下,无法观测数据的异常值以及退化现象。
技术实现思路
1、鉴于上述现有存在的问题,提出了本发明。
2、本发明提供了一种手术机器人高精度自动手眼标定方法解决在目前离线标定方法,采集数据和计算标定矩阵分为两个步骤,手眼标定矩阵的准确性直接依赖于采集数据的质量好坏,导致标定的精确度不高,效率低下,无法观测数据的异常值以及退化现象的问题。
3、为解决上述技术问题,本发明提供如下技术方案:
4、第一方面,本发明提供了一种手术机器人高精度自动手眼标定方法,包括:
5、依据种植手术区域与光学跟踪定位仪镜头视域生成无碰撞的机械臂位姿数据;
6、对所述无碰撞的机械臂位姿数据进行预处理,获得至少一组相对应的机械臂位姿数据和靶标位姿数据;
7、基于加权最小二乘法获得标定矩阵初始值及标定误差,根据误差分布特性生成误差权重矩阵,以求解旋转矩阵与平移向量;
8、将误差数据进行实时反馈,进行误差标定判断。
9、作为本发明所述的手术机器人高精度自动手眼标定方法的一种优选方案,其中:所述依据种植手术区域与光学跟踪定位仪镜头视域生成无碰撞的机械臂位姿数据,包括,
10、设定手术工作区域及其工作角度范围,根据设定范围随机生成机械臂末端数据,以及工作区域内多个数据采集位姿;
11、其中,,为机械臂工具末端到基座的旋转矩阵,为机械臂工具末端到基座的平移向量;
12、根据所述机械臂末端数据,获取机械臂末端工具上的靶标位姿信息;
13、其中,,为靶标到相机坐标系的旋转矩阵,为靶标到相机坐标系的平移向量。
14、作为本发明所述的手术机器人高精度自动手眼标定方法的一种优选方案,其中:所述预处理包括,
15、去除无法观测到靶标信息的机械臂位姿;
16、去除相对运动旋转角度接近的数据。
17、作为本发明所述的手术机器人高精度自动手眼标定方法的一种优选方案,其中:获得至少一组相对应的机械臂位姿数据和靶标位姿数据,包括,
18、对和组数据进行两两组合,即,;
19、其中,、分别代表第个标定位置的靶标位姿数据和第个标定位置机械臂位姿数据,、分别代表第个标定位置的靶标位姿数据和第个标定位置机械臂位姿数据。
20、作为本发明所述的手术机器人高精度自动手眼标定方法的一种优选方案,其中:基于加权最小二乘法获得标定矩阵初始值及标定误差,包括,
21、在无噪声影响情况下,得到手眼标定数学模型,表示为,
22、;
23、则优化目标表示为,
24、;
25、其中,、分别代表从第个标定位置移动到第个标定位置靶标的旋转矩阵的相对变换以及机械臂的旋转矩阵的相对变换;、分别代表从第个标定位置移动到第个标定位置靶标的平移向量的相对变换以及机械臂的平移向量的相对变换;为相机坐标系到机械臂基座坐标系的旋转矩阵;代表相机坐标系到机械臂基座坐标系的平移向量;表示二范数;表示求和符号;表示求解方程的最小值;
26、将旋转矩阵转换成旋转向量表示形式,的单位旋转轴为,的单位旋转轴为,则,分别为、的单位特征值对应的单位特征向量,表示为矩阵:
27、 ;
28、其中,,;
29、将次标定的标靶位姿的旋转向量以及机械臂位姿的旋转向量用矩阵表示分别用、;代表相机坐标系到机械臂基座坐标系的旋转矩阵的估计值。
30、作为本发明所述的手术机器人高精度自动手眼标定方法的一种优选方案,其中:根据误差分布特性生成误差权重矩阵,以求解旋转矩阵与平移向量,包括,
31、引入误差权重矩阵,表示为,
32、 ;
33、其中,、分别为从第个标定位置移动到第个标定位置靶标的旋转矩阵的相对变换以及机械臂的旋转矩阵的相对变换用旋转向量形式表示,为其误差向量;
34、通过正态窗函数计算误差分布特性,误差函数表示为,
35、 ;
36、其中,为样本数量,为正态窗窗高,代表正态窗函数;
37、按行方向计算每个样本在方向,总误差值,以及计算每个样本的误差概率密度估计值,依据估计值分配权重,将每个样本的权重值生成对角矩阵,利用加权最小二乘法计算包含误差时的值,表示为,
38、 ;
39、其中,为每个样本的权重值生成的对角矩阵;
40、将利用正态窗函数计算误差分布,再通过加权最小二乘法求解。
41、作为本发明所述的手术机器人高精度自动手眼标定方法的一种优选方案,其中:获得分区电网内新能源最大可接入功率值,包括,
42、将误差数据进行实时反馈,进行误差标定判断,包括,
43、依据得到的,,计算获取每个样本在方向上的均方根误差;
44、若均方根误差满足设定的误差要求则停止标定,若未满足,则继续采集数据标定。
45、第二方面,本发明提供了一种手术机器人高精度自动手眼标定的系统,包括,
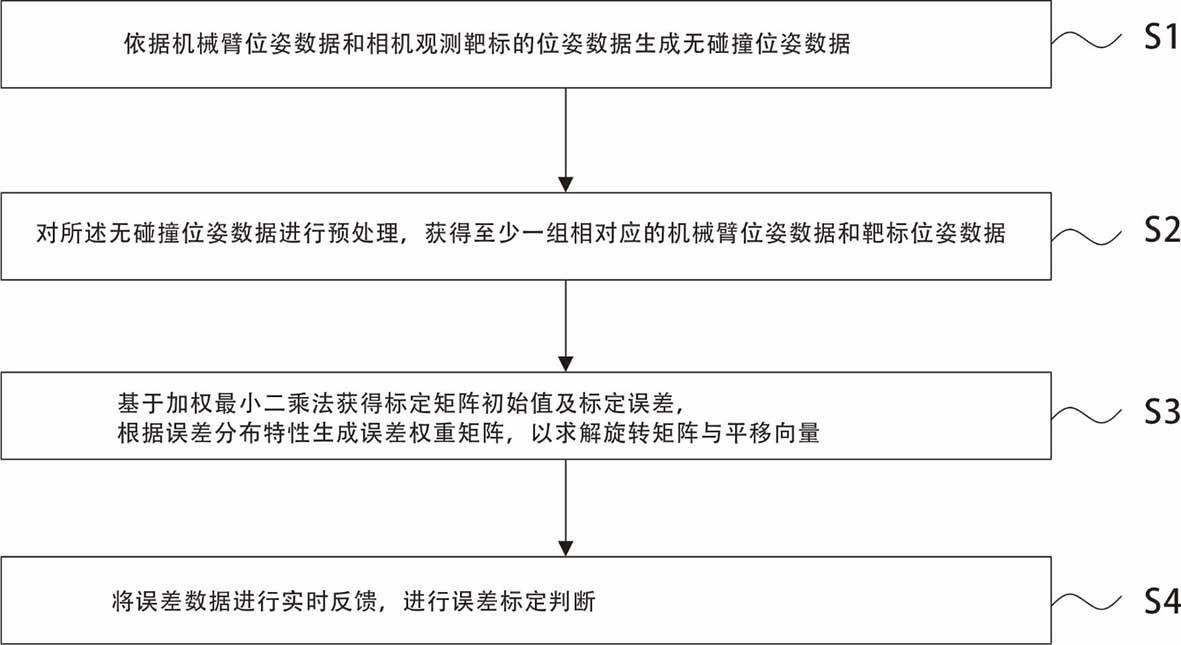
46、获取模块,用于依据机械臂位姿数据和相机观测靶标的位姿数据生成无碰撞位姿数据;
47、数据处理模块,用于对所述无碰撞位姿数据进行预处理,获得至少一组相对应的机械臂位姿数据和靶标位姿数据;
48、求解模块,用于基于加权最小二乘法获得标定矩阵初始值及标定误差,根据误差分布特性生成误差权重矩阵,以求解旋转矩阵与平移向量;
49、反馈判断模块,用于将误差数据进行实时反馈,进行误差标定判断。
50、第三方面,本发明提供了一种计算设备,包括:
51、存储器和处理器;
52、所述存储器用于存储计算机可执行指令,所述处理器用于执行所述计算机可执行指令,该计算机可执行指令被处理器执行时实现所述手术机器人高精度自动手眼标定方法的步骤。
53、第四方面,本发明提供了一种计算机可读存储介质,其存储有计算机可执行指令,该计算机可执行指令被处理器执行时实现所述手术机器人高精度自动手眼标定方法的步骤。
54、与现有技术相比,本发明的有益效果:本发明自动生成无碰撞的机械臂位姿数据,减少数据带来的误差,减少人工手动标定操作,提高标定流程的效率;引入权重矩阵,根据数据的误差分布特性来调整权重,通过为离群值分配较低的权重,减少离群值以及噪声对于拟合结果的影响,提高算法的鲁棒性;进行实时反馈,可以更好地观测数据的异常值以及退化现象。
- 还没有人留言评论。精彩留言会获得点赞!