一种基于移动机器人的配电室快速巡检方法与流程
本发明涉及移动机器人相关,尤其是指一种基于移动机器人的配电室快速巡检方法。
背景技术:
1、在国家电网推动“数字新基建”的大背景下,无人化运维成为智能电网发展趋势。因此,将机器人技术以及人工智能技术与电力技术融合,通过智能机器人实现电站无人化巡检已经成为智能电网的发展趋势。
2、无人化巡检采用智能巡检小车来代替人工巡检,在保护电站工作人员安全的基础上,不仅减少了人力成本,也能高效精准的对电站仪表进行检测。智能巡检小车上通常搭载了可见光相机和红外相机等检测设备,按照设定好的巡检路线,智能巡检小车移动到巡检点位时,把可见光相机和红外相机对准待检测仪表进行拍摄任务,基于智能图像算法,将采集到的数据进行处理,最终得出仪表的工作状态是否正常。
3、传统的智能巡检机器人针对室内进行巡检,通常是将检测需要用的仪器,如:可见光相机和红外相机固定安装在机器人身上某个位置,通过移动机器人来对设备进行检测。这种传统的机器人巡检方式在面对柜体较高、仪表位置分散、仪表较多和多排柜体的场景下,它的缺点很明显。
4、(1)在面对检测的柜体较大,并且不同柜体上仪表分布的位置不同这种巡检场景下,传统的机器人巡检方法,它的检测范围有限,不能超过机器人本身固定检测仪器视角的地方,导致无法对室内的仪表进行全覆盖检测。
5、(2)在面对多排柜体的场景下,需要机器人来回移动才能对两个方向的柜体进行检测,这样大大降低了巡检效率。
技术实现思路
1、本发明是为了克服现有技术中机器人巡检时的检测范围有限的不足,提供了一种利于扩大检测范围的基于移动机器人的配电室快速巡检方法。
2、为了实现上述目的,本发明采用以下技术方案:
3、一种基于移动机器人的配电室快速巡检方法,它包括以下步骤:
4、步骤一,巡检车通过手动遥控方式行驶到各个待巡检设备的相应位置处;
5、步骤二,控制升降结构以及顶升的红外热像仪、可见光相机和云台,依次记录下巡检车定位信息、升降结构升降高度、云台转动角度和可见光相机的聚焦参数,并生成行驶路线三维地图,作为日常巡检控制系统;巡检车的室内导航系统中通过视觉传感器识别二维码,通过多相机多平面二维码定位构建出高精度待巡检电站机房二维码地图,室内停位精度达±10毫米;
6、步骤三,巡检车按照设定好的巡检路线进行巡检;
7、步骤四,控制云台相机移动至合适的拍摄点位,对其巡检点位进行拍摄:在面对较高待巡检设备的仪表拍摄任务时,控制器控制丝杆滑座二带动丝杆滑座三向上移动,控制丝杆滑座三带动云台相机向上移动,达到了提高y轴正方向视野的目的;在面对仪表处于待巡检设备较低处的拍摄任务时,首先控制丝杆滑座一带动其上方设备向后移动,接着控制器控制丝杆滑座二带动丝杆滑座三向下移动,控制丝杆滑座三带动云台相机向下移动,来达到提高y轴负方向视野的目的,达到了利于扩大检测范围的目的,故该巡检车采用丝杆模组进行升降,可自动调节升降高度,再加上云台相机本身广阔的视野角度,满足配电室不同巡检点位的巡检需求,也能高效适应并应用到多种电力设备巡检场合。
8、作为优选,在步骤四中,当巡检车处于两个待巡检设备之间时,拍摄其中一个待巡检设备后转动云台相机180°并通过升降结构调整高度对另一个待巡检设备继续进行拍摄任务。这样无需转动巡检车就能进行下一项拍摄任务,利于提升巡检效率。
9、作为优选,在执行拍摄任务前,先对云台相机进行循环对准工作,在云台相机移动至合适的拍摄点位时,通过事先选取好的参照物进行循环对准,调整云台的角度直至最佳。由于巡检车在巡检过程中产生的重复定位误差,会导致每次所拍摄的图像会出现一定程度的偏差,故这样操作以保证采集到的仪表图片具有较好的一致性。
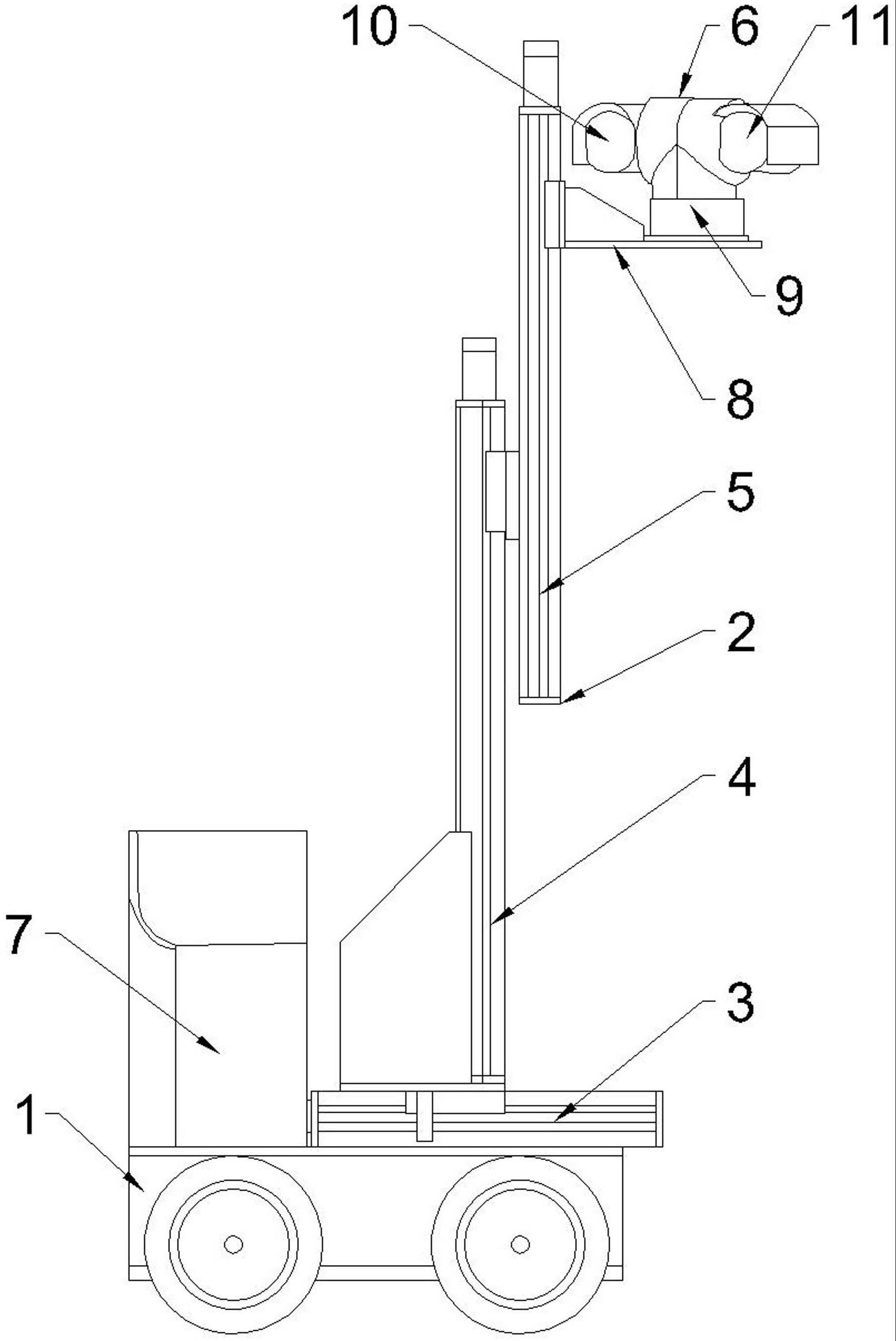
10、作为优选,所述巡检车包括车体,所述车体上设有控制器和升降结构,所述升降结构包括丝杆滑座一,所述控制器和丝杆滑座一均与车体可拆卸连接,所述丝杆滑座一上设有丝杆滑座二,所述丝杆滑座二与丝杆滑座一相互垂直且沿x轴向与丝杆滑座一滑动连接,所述丝杆滑座二上设有丝杆滑座三,所述丝杆滑座三与丝杆滑座二相互平行,所述丝杆滑座三的一侧沿z轴向与丝杆滑座二滑动连接,所述丝杆滑座三的另一侧设有云台相机,所述云台相机沿z轴向与丝杆滑座三滑动连接,所述车体、丝杆滑座一、丝杆滑座二、丝杆滑座三和云台相机均与控制器电连接。本发明中的丝杆滑座一、丝杆滑座二和丝杆滑座三均集成有电机和丝杆,通过电机与控制器电连接,控制器控制电机的工作状态,丝杆在电机的驱动下运作来实现直线运动,属于现有技术,故不在此具体展开;控制云台相机移动至合适的拍摄点位,对其巡检点位进行拍摄时:在面对较高待巡检设备的仪表拍摄任务时,控制器控制丝杆滑座二带动丝杆滑座三向上移动,控制丝杆滑座三带动云台相机向上移动,达到了提高y轴正方向视野的目的;在面对仪表处于待巡检设备较低处的拍摄任务时,首先控制丝杆滑座一带动其上方设备向后移动,接着控制器控制丝杆滑座二带动丝杆滑座三向下移动,控制丝杆滑座三带动云台相机向下移动,来达到提高y轴负方向视野的目的,达到了利于扩大检测范围的目的。
11、作为优选,所述车体的一端固定有防护箱,所述控制器可拆卸安装于防护箱内,所述升降结构位于车体的另一端,所述丝杆滑座一的一端靠近防护箱,所述丝杆滑座一的另一端远离防护箱,所述丝杆滑座一远离防护箱的一端朝向车体的另一端向外延伸呈悬空状态,便于控制器控制丝杆滑座二带动丝杆滑座三向下移动,控制丝杆滑座三带动云台相机向下移动,来达到提高y轴负方向视野的目的,从而利于扩大检测范围的目的。
12、作为优选,所述丝杆滑座三上设有与其相互垂直的支撑块,所述支撑块沿z轴向与丝杆滑座三滑动连接,所述云台相机位于支撑块上且与支撑块可拆卸连接。
13、作为优选,所述云台相机包括云台,所述云台的底部与支撑块可拆卸连接,所述云台的顶部设有红外热像仪和可见光相机,所述红外热像仪和可见光相机分别连接于云台的左右两侧,所述红外热像仪和可见光相机通过云台均能够分别绕水平轴和竖直轴旋转,所述云台、红外热像仪和可见光相机均与控制器电连接。
14、作为优选,所述支撑块上设有电缸,所述电缸与控制器电连接,所述电缸与支撑块可拆卸连接,所述电缸位于丝杆滑座三和云台相机之间,所述电缸的伸缩端上设有分别与红外热像仪和可见光相机相对应的擦拭组件。由于红外热像仪和可见光相机的拍摄镜头经常暴露在空气中,故很容易粘附粉尘等污染物,从而影响拍摄图像的清晰度;当需要对红外热像仪和可见光相机的拍摄镜头进行清洁时,控制器再控制云台转动一定的角度,使得红外热像仪和可见光相机分别与擦拭组件相对应,然后控制器控制电缸工作,使得擦拭组件向上移动至与红外热像仪和可见光相机在同一高度且与其相接触,擦拭组件对红外热像仪和可见光相机的拍摄镜头进行擦拭,从而利于提高拍摄图像的清晰度,操作简单,方便快捷。
15、作为优选,所述擦拭组件包括安装架,所述电缸的伸缩端与安装架固定连接,所述安装架上设有两个分别与红外热像仪和可见光相机相对应的伺服电机,所述伺服电机与安装架可拆卸连接,所述伺服电机的输出端上固定有擦拭块。擦拭组件工作时,伺服电机带动擦拭块旋转进行擦拭,操作简单,方便快捷。
16、作为优选,所述安装架包括底板和竖板,所述竖板与底板固定连接且形成l形结构,所述电缸的伸缩端与底板的底部固定连接,所述伺服电机与竖板可拆卸连接,所述擦拭块的形状为圆形,所述擦拭块的边缘固定有凸筋,所述底板的顶部设有与凸筋相匹配的弧形限位槽,所述擦拭块在伺服电机的驱动下通过凸筋与限位槽相匹配转动连接,所述擦拭块的一侧位于底板上且与伺服电机的输出端可拆卸连接,所述擦拭块相对应的另一侧为擦拭面且位于底板外且呈悬空状。擦拭块在伺服电机的驱动下通过凸筋与限位槽相匹配转动连接,利于擦拭块的平稳转动,提高结构的稳定性;擦拭块相对应的另一侧为擦拭面且位于底板外且呈悬空状,便于相应的擦拭面能与红外热像仪和可见光相机的拍摄镜头充分接触。
17、本发明的有益效果是:利于扩大检测范围;利于提升巡检效率;故该巡检车采用丝杆模组进行升降,可自动调节升降高度,再加上云台相机本身广阔的视野角度,满足配电室不同巡检点位的巡检需求,也能高效适应并应用到多种电力设备巡检场合;保证了采集到的仪表图片具有较好的一致性;利于提高拍摄图像的清晰度,操作简单,方便快捷。
- 还没有人留言评论。精彩留言会获得点赞!