一种机器人系统的制作方法
本技术涉及机器人领域,特别是涉及一种机器人系统。
背景技术:
1、目前中国建筑产业存在劳动力老龄化、人工成本上升压力、安全事故频发、劳动生产率低等一系列问题,建造作业机器人以安全性、高效性、可靠性、自动化优等优势成为缓解建筑产业痛点的有效途径,进而带动建造作业机器人需求量大幅提升。
2、建造作业机器人在行驶过程中如何获取空间位置坐标是一项至关重要的任务。传统的位置测量和定位设备往往存在一些缺点,例如准确度受限、无法适应复杂环境等问题。
3、因此,如何在复杂空间中实现作业机器人的精准定位成为了一个亟待解决的技术问题。
技术实现思路
1、为解决上述技术问题,本技术提供一种机器人系统,能够在复杂空间中实现作业机器人的精准定位。
2、本技术提供的技术方案如下:
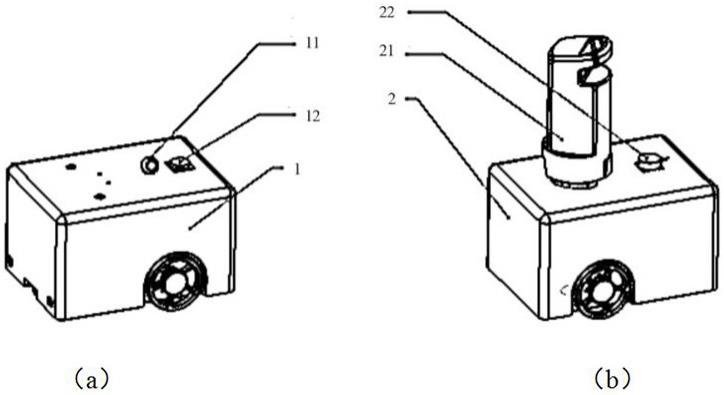
3、一种机器人系统,包括:作业机器人和定位机器人,所述作业机器人上设置有第一控制单元和定位棱镜,所述定位机器人上设置有互相连接的第二控制单元和激光追踪仪,所述第一控制单元,与所述第二控制单元和所述激光追踪仪无线通信连接,其中:
4、所述激光追踪仪,用于发射激光,并在接收所述定位棱镜的反射光后生成所述作业机器人相对于所述定位机器人的实时位置数据;
5、所述第一控制单元,用于获取作业环境数据、目标作业区域、作业规划路径和所述定位机器人的初始基准位置数据,并根据所述初始基准位置数据、所述作业环境数据和所述目标作业区域,判断所述作业规划路径中是否存在阻碍所述激光追踪仪与所述定位棱镜之间激光传输的障碍物,
6、若是,则控制所述作业机器人停放在当前作业位置,并在所述作业机器人停放在当前作业位置后,从所述激光追踪仪获取第一实时位置数据;
7、若否,则按照预设时间间隔,从所述激光追踪仪获取第二实时位置数据,并根据所述第二实时位置数据和所述作业规划路径,控制所述作业机器人进行实时位置纠偏,以使所述作业机器人精准移动至目标作业位置实施精准作业;
8、所述第二控制单元,用于获取所述作业环境数据、所述目标作业区域、所述初始基准位置数据和所述第一实时位置数据,并根据所述作业环境数据、所述目标作业区域、所述初始基准位置数据和所述第一实时位置数据,计算得到目标基准位置数据;
9、所述第二控制单元,还用于根据所述目标基准位置数据,控制所述定位机器人移动并停放至目标基准位置;
10、所述第一控制单元,还用于在所述定位机器人停放在所述目标基准位置后,按照所述预设时间间隔,从所述激光追踪仪获取第三实时位置数据,并根据所述第三实时位置数据和所述作业规划路径,控制所述作业机器人进行实时位置纠偏,以使所述作业机器人精准移动至目标作业位置实施精准作业。
11、优选地,所述机器人系统中,所述第二控制单元,在执行所述根据所述目标基准位置数据,控制所述定位机器人移动并停放至目标基准位置时,具体用于:
12、根据所述目标基准位置数据、所述初始基准位置数据和预设算法,确定位移规划路径;
13、按照所述预设时间间隔,从所述激光追踪仪获取第四实时位置数据,并根据所述第四实时位置数据和所述位移规划路径,控制所述定位机器人进行实时位置纠偏,以使所述定位机器人移动并精准停放至目标基准位置。
14、优选地,所述机器人系统中,所述第二控制单元,还用于建立所述定位机器人的第一坐标系,所述第二控制单元,在执行所述建立所述定位机器人的第一坐标系时,具体用于:
15、获取作业图纸数据,其中,所述作业图纸数据包括作业图纸坐标系;
16、根据所述初始基准位置数据和所述作业图纸数据,计算出初始基准位置在所述作业图纸坐标系中的初始基准坐标数据;
17、根据所述作业图纸坐标系和所述初始基准坐标数据,建立所述定位机器人的第一坐标系。
18、优选地,所述机器人系统中,所述第二控制单元,在执行所述根据所述作业环境数据、所述目标作业区域、所述初始基准位置数据和所述第一实时位置数据,计算得到目标基准位置数据时,具体用于:
19、根据所述第一实时位置数据,得到所述作业机器人在所述第一坐标系的第一实时坐标数据;
20、根据所述第一实时坐标数据和所述作业图纸数据,计算出所述作业机器人在所述作业图纸坐标系中的第一图纸坐标数据;
21、根据所述目标作业区域、所述第一图纸坐标数据、所述初始基准坐标数据和所述作业环境数据,计算出所述定位机器人的目标基准位置在所述作业图纸坐标系中的目标基准坐标数据。
22、优选地,所述机器人系统中,所述第一控制单元,在执行所述根据所述第二实时位置数据和所述作业规划路径,控制所述作业机器人进行实时位置纠偏,以使所述作业机器人精准移动至目标作业位置实施精准作业时,具体用于:
23、根据所述第二实时位置数据,得到所述作业机器人在所述第一坐标系中第二实时坐标数据;
24、根据所述第二实时坐标数据和所述作业图纸数据,计算出所述作业机器人在所述作业图纸坐标系中的第二图纸坐标数据;
25、判断所述第二图纸坐标数据与所述作业规划路径中对应的第一目标坐标数据是否一致,
26、若是,则根据所述作业规划路径,控制所述作业机器人精准移动至目标作业位置实施精准作业;
27、若否,则根据所述第一图纸坐标数据与所述第一目标坐标数据的偏差,控制所述作业机器人修正当前的运动轨迹,并根据所述作业规划路径,控制所述作业机器人精准移动至目标作业位置实施精准作业。
28、优选地,所述机器人系统中,所述第二控制单元,还用于建立所述定位机器人的第二坐标系,所述第二控制单元,在执行所述建立所述定位机器人的第二坐标系时,具体用于:
29、根据所述作业图纸坐标系和所述目标基准坐标数据,建立所述定位机器人的第二坐标系。
30、优选地,所述机器人系统中,所述第一控制单元,在执行所述根据所述第三实时位置数据和所述作业规划路径,控制所述作业机器人进行实时位置纠偏,以使所述作业机器人精准移动至目标作业位置实施精准作业时,具体用于:
31、根据所述第三实时位置数据,得到所述作业机器人在所述第二坐标系中第三实时坐标数据;
32、根据所述第三实时坐标数据和所述作业图纸数据,计算出所述作业机器人在所述作业图纸坐标系中的第三图纸坐标数据;
33、判断所述第三图纸坐标数据与所述作业规划路径中对应的第二目标坐标数据是否一致,
34、若是,则根据所述作业规划路径,控制所述作业机器人精准移动至目标作业位置实施精准作业;
35、若否,则根据所述第三图纸坐标数据与所述第二目标坐标数据的偏差,控制所述作业机器人修正当前的运动轨迹,并根据所述作业规划路径,控制所述作业机器人精准移动至目标作业位置实施精准作业。
36、优选地,所述机器人系统中,所述第二控制单元,在执行所述根据所述目标基准位置数据、所述初始基准位置数据和预设算法,确定位移规划路径时,具体用于:
37、根据所述目标基准坐标数据和所述初始基准坐标数据,计算出位移数据;
38、根据所述位移数据和预设算法,确定位移规划路径。
39、优选地,所述机器人系统中,所述第二控制单元,还用于建立所述作业机器人的第三坐标系,所述第二控制单元,在执行所述建立所述作业机器人的第三坐标系时,具体用于:
40、根据所述作业图纸坐标系和所述第一图纸坐标数据,建立所述作业机器人的第三坐标系。
41、优选地,所述机器人系统中,所述第二控制单元,在执行所述根据所述第四实时位置数据和所述位移规划路径,控制所述定位机器人进行实时位置纠偏,以使所述定位机器人移动并精准停放至目标基准位置时,具体用于:
42、根据所述第四实时位置数据,得到所述定位机器人在所述第三坐标系中的第四实时坐标数据;
43、根据所述第四实时坐标数据和所述作业图纸数据,计算出所述定位机器人在所述作业图纸坐标系中的第四图纸坐标数据;
44、判断所述第四图纸坐标数据与所述位移规划路径中对应的第三目标坐标数据是否一致,
45、若是,则根据所述位移规划路径,控制所述定位机器人移动并精准停放至目标基准位置;
46、若否,则根据所述第四图纸坐标数据与所述第三目标坐标数据的偏差,控制所述定位机器人修正当前的运动轨迹,并根据所述位移规划路径,控制所述定位机器人移动并精准停放至目标基准位置。
47、优选地,所述机器人系统中,
48、所述作业机器人上还设置有与所述第一控制单元连接的第一陀螺仪;
49、所述定位机器人上还设置有与所述第二控制单元连接的第二陀螺仪;
50、所述第一陀螺仪,用于测量所述作业机器人的第一角度数据,并将所述第一角度数据,发送至所述第一控制单元;
51、所述第一控制单元,还用于根据所述第一角度数据,控制所述作业机器人调整自身姿态;
52、所述第二陀螺仪,用于测量所述定位机器人的第二角度数据,并将所述第二角度数据,发送至所述第二控制单元;
53、所述第二控制单元,还用于根据所述第二角度数据,控制所述定位机器人调整自身姿态。
54、优选地,所述机器人系统中,所述定位棱镜采用随动棱镜系统,所述随动棱镜系统包括单面棱镜、安装座、安装支架及动力部件,其中:
55、所述单面棱镜,活动安装于所述安装座上;
56、所述安装座,通过所述安装支架固定在所述作业机器人上;
57、所述动力部件与所述单面棱镜驱动连接;
58、所述动力部件,用于带动所述单面棱镜旋转;
59、所述第一控制单元与所述动力部件连接;
60、所述第一控制单元,还用于根据所述第一角度数据,控制所述动力部件的运行,以使所述单面棱镜旋转至指定方向。
61、上述技术方案,涉及一种机器人系统,包括作业机器人和定位机器人;通过采用双机器人合作的方式,基于设置在定位机器人上的激光追踪仪,可以发射激光,并接收设置在作业机器人上的定位棱镜的反射光,并生成作业机器人相对于定位机器人的实时位置数据;第一控制单元可以获取作业机器人的实时位置数据,进而根据实时位置数据和作业规划路径,控制作业机器人进行实时位置纠偏,以对作业机器人的实时位置进行校核,无需人工介入跟踪定位,可以使作业机器人在运动过程中持续保持精准定位,实时保证作业机器人的定位精度。
62、特别是在复杂空间中,当作业机器人上的第一控制单元,根据作业环境数据、目标作业区域和定位机器人的初始基准位置数据,判断出作业规划路径中存在阻碍激光追踪仪和定位棱镜之间激光传输的障碍物时,第一控制单元控制作业机器人自动停放在当前作业位置,然后从激光追踪仪获取第一实时位置数据;定位机器人上的第二控制单元,可以根据作业环境数据、目标作业区域、初始基准位置数据和第一实时位置数据,计算出目标基准位置数据并控制定位机器人移动至目标基准位置,以此实现基准位置的动态调整,以避开障碍物的干扰,实现作业机器人实时位置数据的持续获取和精确定位。与现有技术相比,上述技术方案实现了复杂空间中作业机器人的实时位置数据的获取,可使作业机器人在激光追踪仪的作用范围内始终与定位机器人保持数据互通,定位机器人不断反馈作业机器人实时位置数据,以保证作业机器人在移动过程中的精确定位。
63、综上所述,上述技术方案能够在复杂空间中实现作业机器人的精准定位。
- 还没有人留言评论。精彩留言会获得点赞!