一种用于狭窄入口通道的大型罐体内部重载作业机器人的制作方法
本发明涉及核设施运维领域,尤其涉及一种用于狭窄入口通道的大型罐体内部重载作业机器人。
背景技术:
1、我国自1988年开始对老旧核设施进行退役,但主要集中于中低放环境、便于实施的场所,依赖于作业人员手动操作。实施退役时,作业人员穿戴防护用品携带去污、切割工具对核设施进行去污、切割、分类存储等作业,这种方式作业内容灵活、作业工具简单、人员技能需求低,但也存在着人员受照剂量大、中高放环境无法实施等难题。
2、随着我国核设施退役治理工作的深入,对于中高放环境、环境复杂、人员不可达等场所的退役需求日益迫切,其中尤以放射性废液贮槽退役的需求最为急迫。废液贮槽主要用于长期贮存放射性废液,通常为不锈钢或碳钢筒体结构,尺寸差别很大,直径范围涵盖3m-12m,高度3.5m-6m,环境剂量最高可达100msv/h,内表面建造期间刷有防锈漆。此外,此类贮槽基于辐射防护考虑,通常入口通道尺寸都比较小,为满足废液贮槽的退役作业需求,需开发一种狭窄入口通道的大型罐体内部重载作业机器人,用于替代人员进入贮槽内部实施退役作业。
技术实现思路
1、本发明的目的在于克服现有技术中所述的缺陷,从而提供一种用于狭窄入口通道的大型罐体内部重载作业机器人,该机器人能够进入人员不可达的狭窄入口通道、大内腔尺寸、高空高、高放射性环境罐体。
2、为了实现上述目的,本发明提供如下技术方案:
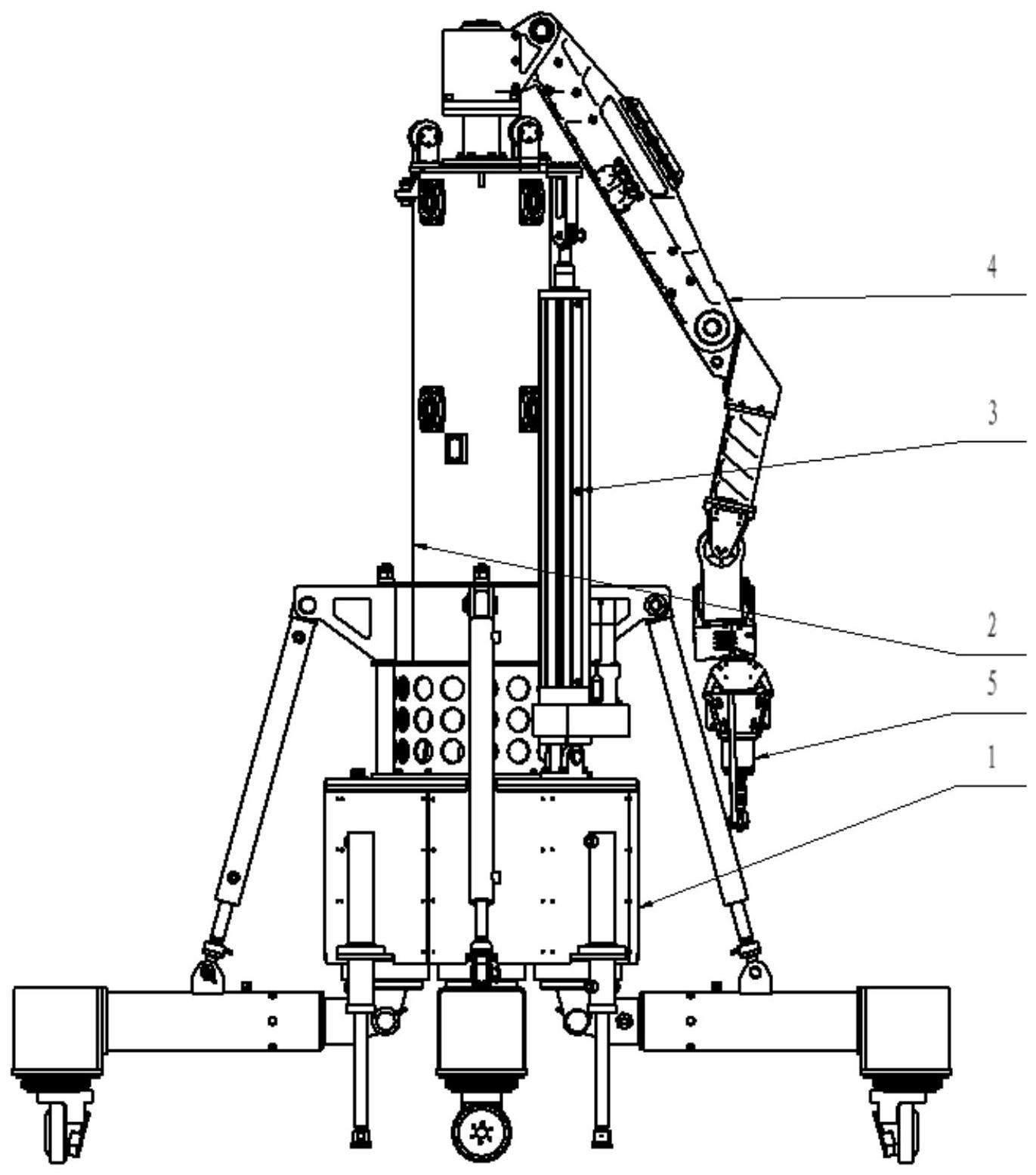
3、一种用于狭窄入口通道的大型罐体内部重载作业机器人,包括:
4、轮腿式移动平台,具有腹部部件、设置在所述腹部部件下方的可摆动的支撑腿部件、设置在所述腹部部件上方的推杆支撑部件、伸缩连接所述支撑腿部件和所述推杆支撑部件的支撑腿提升部件、用于支撑的腹部支撑油缸,所述轮腿式移动平台用于实现机器人作业时的移动调整;
5、机械臂多级升降臂,设置在所述轮腿式移动平台上,具有多组嵌套的升降臂部件,通过多组所述升降臂部件的升降运动以增加作业高度,进而对高处进行作业;
6、升降驱动部件,一端连接所述轮腿式移动平台,另一端安装在所述机械臂多级升降臂上,用以驱动所述机械臂多级升降臂升降运动;
7、液压机械臂,设置在所述机械臂多级升降臂的顶部,所述液压机械臂上设有末端作业工具用以执行贮槽内壁作业任务;
8、底部作业安装座,用于替代所述机械臂多级升降臂来连接所述轮腿式移动平台和所述液压机械臂,进而对低处进行作业。
9、作为一种可实施的方式,所述支撑腿部件包括支撑腿连接座、支撑腿筒体、立式舵轮、支撑腿连接销钉和支撑腿提升销孔,所述立式舵轮连接所述支撑腿筒体,所述支撑腿筒体通过所述支撑腿连接销钉连接所述支撑腿连接座,所述支撑腿连接座用于连接所述支撑腿部件和所述腹部部件,所述支撑腿提升销孔连接所述支撑腿提升部件,通过所述支撑腿提升部件的伸缩实现所述支撑腿筒体绕所述支撑腿连接销钉相对于所述支撑腿连接座的上下摆动。
10、作为一种可实施的方式,所述支撑腿部件还包括固定在所述支撑腿连接座上的支撑腿摆动编码器,所述支撑腿摆动编码器的转动轴与所述支撑腿筒体连接,由所述支撑腿筒体的上下摆动带动所述支撑腿摆动编码器的转动,从而获得所述支撑腿筒体的上下摆动角度值。
11、作为一种可实施的方式,所述支撑腿连接座包括连接座上部圆盘和连接座下部支臂;所述连接座上部圆盘中心加工有沉孔,与所述腹部部件下部的rv减速机外圆配合,实现所述支撑腿连接座与rv减速机的同轴安装,并通过螺栓安装固定在所述腹部部件的rv减速机上,随着rv减速机的转动而同步转动;所述连接座下部支臂加工有圆孔,通过所述支撑腿连接销钉将所述支撑腿筒体铰接在所述支撑腿连接座上。
12、作为一种可实施的方式,所述腹部部件包括腹部部件底板、腹部部件框架、腹部部件侧盖板、腹部部件顶板、支撑腿摆动减速机,所述腹部部件底板设置在所述腹部部件框架下方,所述腹部部件顶板设置在所述腹部部件框架上方,所述腹部部件侧盖板间隔固定在所述腹部部件框架上方侧面,所述支撑腿摆动减速机通过螺栓安装在所述腹部部件底板上,并与所述支撑腿连接座通过螺栓连接,由所述支撑腿摆动减速机的转动带动所述支撑腿部件的摆动。
13、作为一种可实施的方式,所述推杆支撑部件包括推杆支撑基座、推杆支撑芯轴和斜拉耳;所述推杆支撑基座与腹部部件顶板通过螺栓连接;所述推杆支撑芯轴是所述斜拉耳的转动轴,所述推杆支撑芯轴与推杆支撑加强杆内孔为轴孔配合;所述斜拉耳与所述推杆支撑芯轴通过轴承连接,实现所述斜拉耳随着所述支撑腿部件的前后摆动而同步转动。
14、作为一种可实施的方式,所述机械臂多级升降臂包括固定臂部件、第一级升降臂部件、第二级升降臂部件、第三级升降臂部件、机械臂连接块、重载滚轮、重载直线导轨;所述第一级升降臂部件可转动地安装在所述固定臂部件内并且能从所述固定臂部件伸出,所述第二级升降臂部件可转动地安装在所述第一级升降臂部件内并且能从所述第一级升降臂部件伸出,所述第三级升降臂部件可转动地安装在所述第二级升降臂部件内并且能从所述第二级升降臂部件伸出。
15、作为一种可实施的方式,所述机械臂多级升降臂还包括绳排机构,所述绳排机构包括第一套绳排升降端、第一套绳排钢丝绳、第一套绳排固定端、第一套绳排导轮、第二套绳排升降端、第二套绳排钢丝绳、第二套绳排固定端、第二套绳排导轮;
16、所述第一套绳排升降端安装在所述第二级升降臂部件的下端面,所述第一套绳排固定端安装在所述固定臂部件的上端面,所述第一套绳排导轮安装在所述第一级升降臂部件的上端面,所述第一套绳排钢丝绳压在所述第一套绳排导轮上半圆,所述第一套绳排钢丝绳的两端分别向下连接至所述第一套绳排升降端和所述第一套绳排固定端;
17、所述第二套绳排升降端安装在所述第三级升降臂部件的下端面,所述第二套绳排固定端安装在所述第一级升降臂部件的上端面,所述第二套绳排导轮安装在所述第二级升降臂部件的上端面,所述第二套绳排钢丝绳压在所述第二套绳排导轮上半圆,所述第二套绳排钢丝绳的两端分别向下连接至所述第二套绳排升降端和所述第二套绳排固定端。
18、作为一种可实施的方式,所述升降驱动部件包括升降驱动底座、升降驱动电缸和升降驱动连接块,所述升降驱动底座将所述升降驱动部件固定在腹部部件顶板上,所述升降驱动底座通过销钉与所述升降驱动电缸连接,所述升降驱动连接块连接所述升降驱动电缸和所述机械臂多级升降臂。
19、作为一种可实施的方式,所述末端作业工具包括末端工具快换盒、高压水工具连接板、高压水喷头、磨铣工具连接板、磨铣工具主轴、磨铣工具头,所述末端工具快换盒安装至所述液压机械臂末端,所述高压水工具连接板将所述高压水喷头固定在所述末端工具快换盒上,所述磨铣工具连接板将所述磨铣工具主轴固定在所述末端工具快换盒上,所述磨铣工具头安装在所述磨铣工具主轴上。
20、与现有技术相比,本发明提供的用于狭窄入口通道的大型罐体内部重载作业机器人具有以下有益效果:
21、本发明的作业机器人通过轮腿式移动平台实现在贮槽底部的平面移动、转弯及跨越底部障碍物,通过机械臂多级升降臂实现液压机械臂及末端作业工具的升降,通过程序控制液压机械臂的运动轨迹,通过复合作业机器人的平面移动、升降运动和液压机械臂的空间运动轨迹,能将末端作业工具运送至贮槽内壁任意作业位置,由末端作业工具实施高压水射流去污、除锈和铣削、打磨加工等作业,实现对贮槽内壁的退役作业。
22、本发明在对贮槽内壁地面及侧壁低处作业时,用低处作业安装座替代机械臂多级升降臂,从而降低液压机械臂的整体距离贮槽内壁地面的高度,满足对贮槽内壁地面及侧壁低处作业的需求。
23、进一步地,本发明通过远程控制轮腿式移动平台的立式舵轮的行走及转向机构,实现作业机器人沿贮槽底部任意方向的移动,增加作业场景的移动灵活性。
24、在遇到地面障碍物时,腹部支撑油缸伸出支撑贮槽底部,对作业机器人提供支撑,再通过控制支撑腿提升部件运动,将支撑腿部件提升至最高处,然后通过远程控制电机驱动支撑腿摆动减速机,将支撑腿部件前后摆动至跨越障碍物,再将支撑腿部件下放至贮槽底部,完成支撑腿部件跨越障碍物,重复上述过程,作业机器人可实现跨越贮槽底部障碍物。
25、进一步地,本发明通过远程控制升降驱动部件升降运动,带动第一级升降臂部件的升降运动,然后通过两套绳排机构,实现第二级升降臂部件、第三级升降臂部件的同步升降运动,进而实现机械臂多级升降臂的同步升降,带动其上安装的液压机械臂升降,实现对贮槽顶部和侧壁高处的退役作业全覆盖。
26、进一步地,本发明的末端作业工具通过复合高压水射流工具、磨铣作业工具,可实现对贮槽内壁的高压水射流去污、除锈、除油漆以及铣削、打磨作业,并可根据需要对作业工具进行快速更换。
27、进一步地,本发明的作业机器人在通过狭窄入口通道时,通过将支撑腿提升部件伸出至最大行程,可将4个支撑腿部件收拢至腹部部件下放,缩小作业机器人在高度方向的包络圆尺寸,满足通过狭窄入口通道的需求。
28、进一步地,本发明的作业机器人在贮槽内部实施作业时,将支撑腿提升部件回收至指定长度,4个支撑腿部件水平张开至最大尺寸,对作业机器人提供支撑,避免液压臂升至最高位置作业时,作业机器人倾翻。
- 还没有人留言评论。精彩留言会获得点赞!