一种可转向的交叉伸缩臂结构的制作方法
本发明涉及伸缩臂的,更具体地,涉及一种可转向的交叉伸缩臂结构。
背景技术:
1、伸缩臂为广泛地使用于产业用机器人的臂体、照明器具的支架、支持用来载置物品的平台的臂体等的各种产业机器、生活关联器具、医疗关联器具等。
2、现有技术公开了一种用于配电仪表检测的可伸缩机械臂,包括滑座,所述滑座的上端设置有滑轨,所述滑座的下表面安装有电控箱,所述电控箱的下表面设置有机械臂安装箱,所述机械臂安装箱的前后侧均安装有交叉臂,所述交叉臂的下端安装有安装板,所述安装板的下表面安装有摄像头,所述安装板的上表面安装有伸缩轨道,所述安装板的上表面贯穿安装有连接线,所述交叉臂的内侧安装有连接杆,所述电控箱的内部安装有控制模块、无线收发模块与行程开关;该方案利用可伸缩的机械臂固定高清摄像机,并可以上下移动。
3、然而现有技术的控制机构仅能控制伸缩臂在直线上伸缩实现升降运动,无法改变伸缩臂伸缩的方向实现伸缩臂在平面内运动,导致伸缩臂不能灵活地触及到任意角度的物体,在伸缩臂的实用方面存在局限性,存在无法控制伸缩臂随意转向的技术问题。
技术实现思路
1、本发明的目的在于克服现有技术中无法控制伸缩臂随意转向的不足,提供一种可转向的交叉伸缩臂结构。
2、为解决上述技术问题,本发明采用的技术方案是:
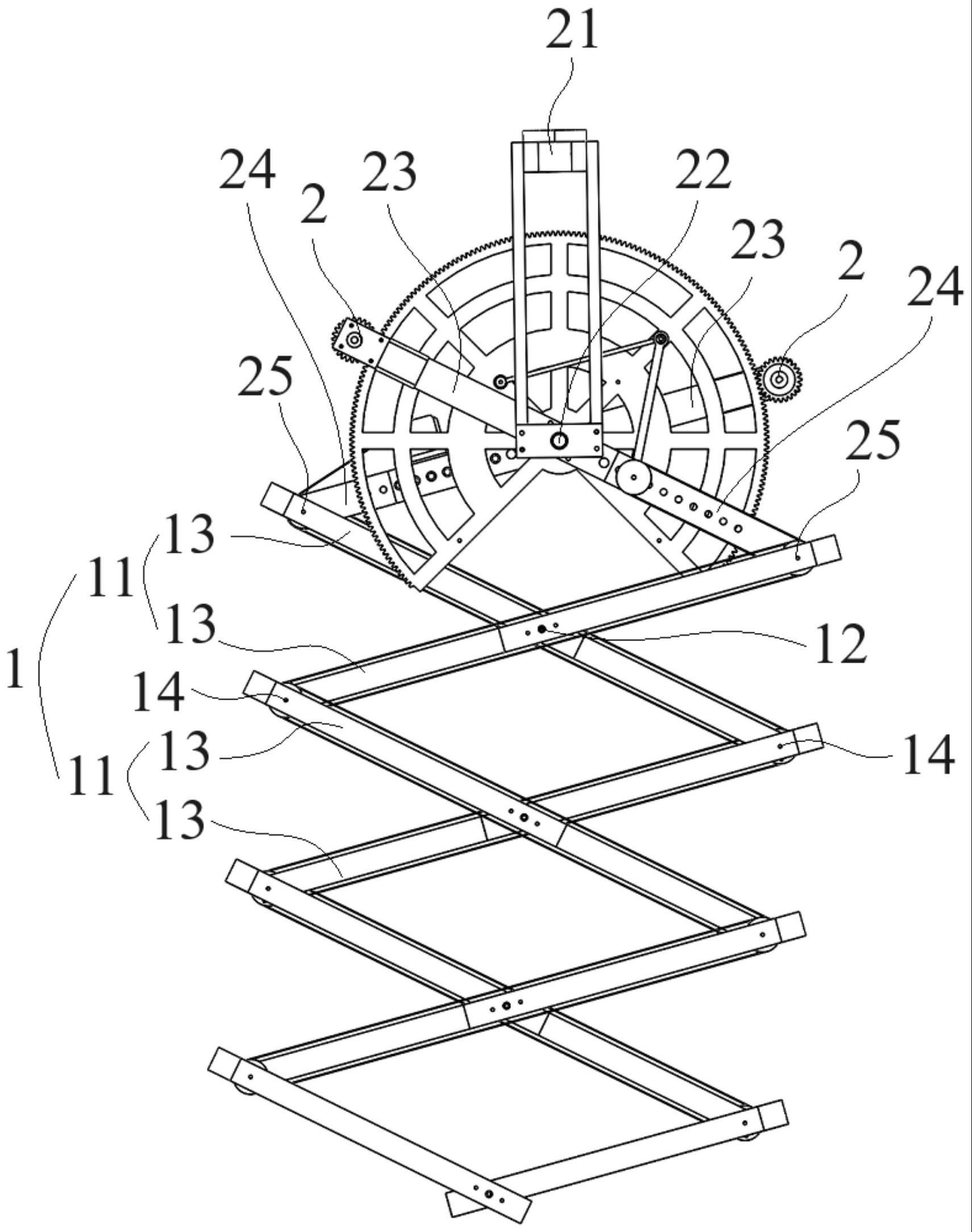
3、一种可转向的交叉伸缩臂结构,包括交叉伸缩装置和用于驱动所述交叉伸缩装置做伸缩及转向运动的转向伸缩控制结构;所述交叉伸缩装置包括若干组x构型,所述x构型包括两组以交叉轴为交叉点的交叉臂;所述交叉臂在交叉轴的上部分为交叉主动端、在交叉轴的下部分为交叉被动端,若干所述x构型的交叉被动端与另一交叉主动端通过连接轴连接;所述转向伸缩控制结构设有转向伸缩驱动架、两组交叉连接于所述转向伸缩驱动架形成交叉源动力轴的交叉动力臂、及设于所述交叉动力臂的功能驱动架;所述交叉动力臂的上端连接于所述转向伸缩控制结构的输出端,所述功能驱动架设于所述交叉动力臂的下端;所述功能驱动架设有传动轴且分别与所述交叉伸缩装置一端的交叉主动端转动连接。
4、本发明的一种可转向的交叉伸缩臂结构,由于两组交叉臂以交叉轴为交叉点相互转动连接,因此两组交叉臂可以以交叉轴为中心相对转动,由于所述交叉臂在交叉轴的上部分为交叉主动端、在交叉轴的下部分为交叉被动端,若干所述x构型之间的所述交叉被动端与交叉主动端依次相互转动连接形成连接轴,因此相邻的x构型的两端交叉臂可以以连接轴为中心进行转动,由交叉主动端传递动力至交叉被动端,使若干x构型可以同时运动,从而实现交叉伸缩装置的伸缩运动;由于两组交叉动力臂相互转动连接于所述转向伸缩驱动架形成交叉源动力轴,两组交叉动力臂可以以交叉源动力轴为中心进行转动,因此设置两组所述交叉动力臂的上端分别连接于所述转向伸缩控制结构的输出端,两组所述交叉动力臂的下端的功能驱动架通过传动轴分别与所述交叉伸缩装置一端的连接轴转动连接,转向伸缩控制结构通过控制两组所述交叉动力臂以交叉源动力轴为中心进行同向或反向的转动实现交叉伸缩装置的转向和伸缩运动,将交叉伸缩装置的转向和伸缩控制集成于一体,有效解决了现有技术中无法控制伸缩臂随意转向的技术问题。
5、进一步地,所述交叉源动力轴为固定轴,所述转向伸缩控制结构控制所述交叉伸缩装置以所述固定轴为中心轴进行转向运动。设置所述交叉源动力轴为固定轴,使所述交叉源动力轴作为所述转向伸缩控制结构控制所述交叉伸缩装置转向运动的中心轴更具有稳定性,结构更合理。
6、进一步地,所述转向伸缩驱动架设有与所述交叉源动力轴同轴设置的固定大径圆齿盘,所述交叉动力臂的上端设有可控驱动模块,所述可控驱动模块可沿所述固定大径圆齿盘的边缘移动。利用可沿所述固定大径圆齿盘的边缘移动的可控驱动模块分别驱动两组所述交叉动力臂以交叉源动力轴为中心转动,实现交叉动力臂的自动转动,稳定扭矩的转化输出。
7、进一步地,所述可控驱动模块的输出端设有小径齿轮,所述固定大径圆齿盘边缘均匀设有轮齿,所述小径齿轮与所述轮齿啮合。利用设于可控驱动模块的输出端的小径齿轮与固定大径圆齿盘啮合,增加可控驱动模块沿所述固定大径圆齿盘的边缘移动的稳定性。
8、进一步地,所述交叉伸缩装置远离所述交叉动力臂的一端设有运载装置,所述功能驱动架设有用于驱动所述运载装置运行的电控功能驱动模块。在交叉伸缩装置远离所述交叉动力臂的一端设置运载装置,并将电控功能驱动模块设置在功能驱动架用于远程驱动所述运载装置运行,减少交叉伸缩装置端部的负载。
9、进一步地,所述交叉伸缩装置在所述连接轴同轴转动设有传动轮;所述电控功能驱动模块的输出轴与传动轮之间设有传动带,相邻传动轮之间通过传动带传动,所述传动带与交叉臂平行设置。设置传动轮同轴转动于连接轴,相邻传动轮之间通过传动带传动,并设置传动带与交叉臂平行,可以完美地将动力传送与交叉伸缩装置融合在一起,交叉伸缩装置的伸缩运动与传动轮、传动带之间的动力传送相互独立不存在干涉,传动轮和传动带之间的动力传送也不需要跟随交叉伸缩装置的伸缩运动进行适用性调整,最大程度紧凑交叉伸缩装置的结构,具有节省空间的优点。
10、进一步地,所述固定大径圆齿盘设有用于使所述运载装置保持方向的自保持机构,所述自保持机构包括一端转动连接于所述固定大径圆齿盘的第一连杆、及一端转动连接于所述第一连杆另一端的第二连杆,所述第二连杆另一端设有传动轮;位于所述第二连杆另一端的传动轮转动设于所述功能驱动架的传动轴;所述运载装置固定设有传动轮,转动设于所述第二连杆的传动轮与固定设于所述运载装置之间的传动轮之间通过传动带同步转动。由于第二连杆转动设置在第一连杆和功能驱动架的传动轴之间,当两组交叉动力臂绕交叉源动力轴同向转动驱动交叉伸缩装置转向时,第二连杆会做摆杆运动,使第二连杆的传动轮转动的角度与交叉动力臂绕交叉源动力轴转动的角度一致,从而传动到运载装置的传动轮使运载装置转动相应的角度,保证运载装置始终保持在设定状态而不受交叉伸缩装置转动的影响,满足运载装置需要与重力方向形成不同角度的使用需求。
11、进一步地,转动设于所述第二连杆的传动轮与固定设于所述运载装置的传动轮之间通过所述交叉臂上的传动轮进行依次传动,相邻传动轮之间通过传动带传动,所述传动带与交叉臂平行设置。自保持机构的动力传送与运载装置的动力传送采用同一套结构,在交叉伸缩装置上形成对称的布置,进一步提高交叉伸缩装置的空间利用率。
12、进一步地,所述交叉伸缩装置设有用于容纳导线或管材的线管结构,所述线管结构的端部设于所述运载装置,所述线管结构缠绕若干所述交叉臂并与交叉臂平行设置。将用于容纳导线或管材的线管结构的端部设于所述运载装置,可以将管材或导线引至运载装置,并且线管结构缠绕若干所述交叉臂与交叉臂平行设置,将线管结构与伸缩机构融合在一起,不会产生运动干涉。
13、进一步地,所述功能驱动架排列设有若干调节孔,所述交叉动力臂排列设有若干固定孔,若干所述调节孔之间与若干所述固定孔之间的间距相同。由于若干所述调节孔之间与若干所述固定孔之间的间距相同,因此功能驱动架可以通过不同的调节孔与交叉动力臂的固定孔对应连接,达到任意改变力臂长度的效果,从而适应不同尺寸规格的交叉伸缩装置,具有灵活性好、通用性高的优点。
14、与现有技术相比,本发明的有益效果是:
15、本发明的转向伸缩控制结构不仅可以驱动交叉伸缩装置在直线上做伸缩运动,还可驱动交叉伸缩装置绕其一端的交叉源动力轴转动,伸缩运动搭配定轴转动实现了交叉伸缩装置可以在平面内运动,增加了一个运动维度的交叉伸缩装置可以灵活地触及到平面内任意角度的物体,而不局限于单一方向上的伸缩,极大提升了伸缩臂的实用性,有效解决了现有技术中无法控制伸缩臂随意转向的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!