一种基于前馈补偿+PI反馈的位姿控制器的实现方法
本发明涉及六轴并联液压六自由度运动平台控制领域,具体地说,是一种基于前馈补偿+pi反馈的位姿控制器的实现方法。
背景技术:
1、相比于其他并联机构在应用场合下只关注于提高位置跟踪的精度,用于运动模拟系统的六自由度运动平台更需要关注于整体运动系统的动力学性能,也意味着,高性能的运动模拟系统不仅要求控制率能精确地跟踪指令轨迹,还要提供给六自由度运动平台上面的实物合适的力感,包含旋转和平移时的角速度及重力感。反馈控制系统中,反馈是按偏差控制的,即在干扰的作用下,被控量先偏离给定值,然后调节器才按偏差产生控制作用去抵消干扰的影响,如果干扰不断施加,则系统总是跟在干扰作用后面波动,从而不可避免的存在稳态位置跟踪误差,影响系统最终的运动轨迹,引起加工误差,前馈控制是按扰动量进行补偿的开环控制,即当系统扰动出现时,按照扰动量的大小直接产生校正作用。
2、根据现有的前馈补偿和pi反馈控制的模型基础上,还需要提供一种能够准确完成前馈补偿加pi反馈的复合控制的实现方式,以应用此模型到实践中。
技术实现思路
1、为了解决上述问题,本发明提出了一种基于前馈补偿+pi反馈的位姿控制器的实现方法,该实现方法能够准确的完成前馈补偿+pi反馈的控制,实现对液压并联机构六自由度运动平台精确控制,保证其高效的动力学性能。
2、为达到上述目的,本发明采用的具体技术方案如下:
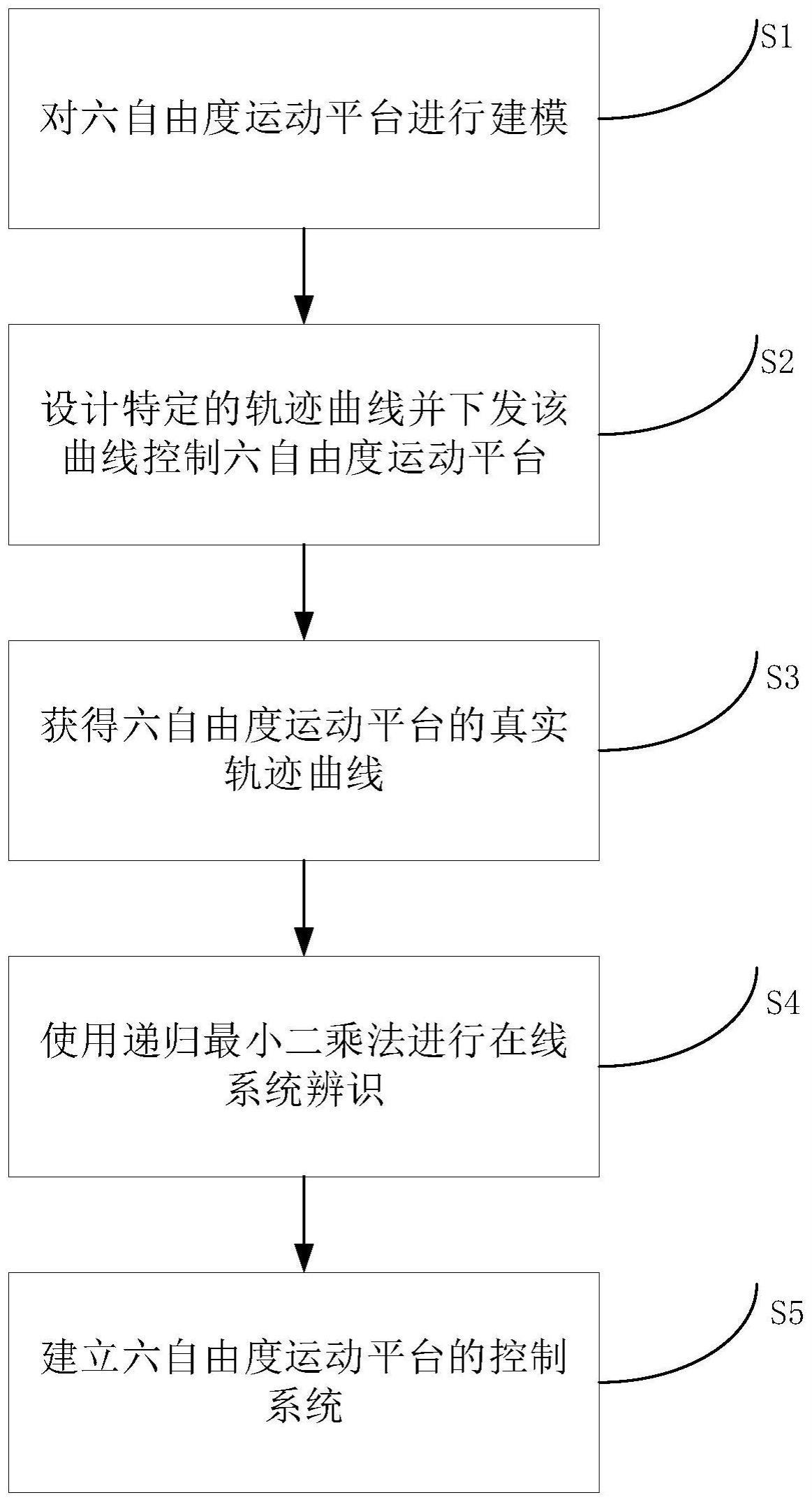
3、一种基于前馈补偿+pi反馈的位姿控制器的实现方法,该方法包括如下步骤:
4、s1、对液压并联机构六自由度运动平台进行建模;
5、s2、设计特定的轨迹曲线并下发该曲线控制液压并联机构六自由度运动平台六个液压缸进行位置移动;
6、s3、获得液压并联机构六自由度运动平台的真实轨迹曲线;
7、s4、使用递归最小二乘法对系统参数进行在线辨识;
8、s5、建立液压并联机构六自由度运动平台的控制系统。
9、采用上述设计,使用递归最小二乘法对系统参数进行在线辨识得到六自由运动平台真实的系统模型,不需要通过对液压并联机构六自由度运动平台的每一个部件进行单独计算,用数值法获得计算系统参数,使得搭建六自由度运动平台模型更加的便捷;液压并联机构六自由度运动平台的参数辨识完成后,即获得了系统的传递函数,根据传递函数即可搭建出前馈补偿+pi反馈的控制器,从而实现对六自由度运动平台的精确控制。
10、作为本发明的一种优选方案,s1中,液压并联机构六自由运动平台分为三个部分,分别是下平台,上平台以及液压伸缩缸,下平台固定,上平台运动,六个液压伸缩缸下端点通过虎克铰连接到下平台,六个液压伸缩缸上端点通过虎克铰连接到上平台,具体为:
11、s-a1:在下平台的平台中心建立欧拉坐标系,中心点设为o,向上为z的正方向,x、y轴可通过右手定则确定;
12、s-a2:六个液压伸缩缸下端点以两两配对的形式,在下平台间隔120°进行布置,配对的两个液压伸缩缸间隔角度为α1,由此可以确定出六个液压伸缩缸的下端点位置,分别设为b1、b2、b3、b4、b5、b6,其中b1、b2配对,b3、b4配对,b5、b6配对;
13、s-a3:在上平台的平台中心建立欧拉坐标系,中心点设为o`,x`轴与x轴方向重合,y`轴与y轴方向重合,z`轴与z轴方向重合,中心点o`与下平台中心点o距离设为常数c;
14、s-a4:六个液压伸缩缸上端点以两两配对的形式,在上平台间隔120°进行布置,配对的两个液压伸缩缸间隔角度为α2,由此可以确定出六个液压伸缩缸的上端点位置,分别设为b1、b2、b3、b4、b5、b6,其中b1、b2配对,b3、b4配对,b5、b6配对;
15、s-a5:b1与b1是第一个液压伸缩缸的上下端点,其长度为l1,b2与b2是第二个液压伸缩缸的上下端点,其长度为l2,b3与b3是第三个液压伸缩缸的上下端点,其长度为l3,b4与b4是第四个液压伸缩缸的上下端点,其长度为l4,b5与b5是第五个液压伸缩缸的上下端点,其长度为l5,b6与b6是第六个液压伸缩缸的上下端点,其长度为l6。
16、采用上述方案,可以清晰的将六自由度运动平台分为上平台与下平台两个部分,可以方便的进行正解与逆解运算。
17、作为本发明的一种优选方案,s2中,在pc机中设计特定的轨迹曲线,通过逆解计算,获得六自由度运动平台的六个液压缸的位置数据,将位置数据通过udp下发到主站转发平台,主站转发平台将位置数据通过ethercat总线发送给内环反馈控制器,内环反馈控制器控制电液伺服阀,进而控制油缸的位置移动,具体为:
18、s-b1:逆解计算即是在得知六自由度运动平台的姿态,计算出六自由度运动平台的六个液压伸缩缸的长度,计算公式如下:
19、p=t*p0+p`
20、p为上平台新的坐标点,t是欧拉旋转变换复合矩阵,p`为空间x、y、z三个方向的平移量,p0为上平台当前的坐标点;
21、s-b2:欧拉旋转变换复合矩阵即是x轴、y轴、z轴三个方向的旋转变换矩阵相乘,公式如下:
22、t=t1*t2*t3
23、t1、t2、t3分别对应x轴、y轴、z轴三个方向的旋转变换矩阵,其中:
24、
25、α为上平台x`轴相对于下平台x轴的旋转角度,β为上平台y`轴相对下平台y轴的旋转角度,γ为上平台z`轴相对于下平台z轴的旋转角度;
26、s-b3:在得到上平台的新坐标后,即可以根据公式计算出当前六个液压伸缩缸的缸长,公式如下:
27、
28、其中,li为六个液压伸缩缸的缸长值,pix,piy,piz为上台面的六个动点的坐标值,bix,biy,biz为下台面六个静点的初始坐标值;
29、s-b4:将s-b3得到的六个液压伸缩缸的缸长通过主站转发平台分别发送到六个内环反馈控制器,内环反馈控制器控制电液伺服阀,进而控制油缸的位置移动。
30、采用上述方案,可以将设定的特定轨迹曲线反解为六个液压伸缩缸的长度信息,下发长度信息给内环反馈控制器,实现六个液压伸缩缸的开环运动。
31、作为本发明的一种优选方案,s3中,位置传感器此时采集到运动后的油缸位置信息,发送此位置信息给内环反馈控制器,内环反馈控制器通过ethercat总线将此信息上传到主站转发平台,主站转发平台通过udp上传给pc主机,pc主机进行正解运算,即可以得到真实的运动轨迹曲线,正解运算具体如下:
32、s-c1:由位置反解的方程可知:
33、
34、可以变式为:
35、
36、其中,li0为各液压伸缩缸的初始长度,δli为各液压伸缩缸的伸缩量,将上式抽象为:
37、
38、式为非线性方程组,求解该非线性方程组即可以解出所求位姿q;
39、s-c2:对s-c1中的非线性方程组在q0附近进行泰勒级数展开,并取其线性部分,将非线性方程组转化成线性方程组,即:
40、
41、令:δqi=qi-qi0,则移项处理后可得:
42、
43、即:
44、
45、j为雅可比矩阵,也是方程的系数矩阵,则可将线性方程组转化为:
46、
47、s-c3:求解此线性方程的具体步骤如下:
48、(1)输入平台的结构参数以及各液压伸缩缸的伸缩量,选取中位时平台的姿态作为迭代的初始值;
49、(2)通过给定初值及计算得到的各液压伸缩缸的伸缩量,确定fi(q0),并得到雅可比矩阵j;
50、(3)利用式求解位置正解;
51、(4)给定精度σ,判断max(δqi)≤σ,如果达到给定精度要求则输出结果,否则,利用式δqi=qi-qi0修正姿态,重复(2)~(4)的步骤,直至满足所求精度为止。
52、采用上述方案,采集到六个液压伸缩缸的开环运动的位置数据,然后再pc中正解出六自由度运动平台实际的位姿信息。
53、作为本发明的一种优选方案,s4中,使用递归最小二乘法对系统参数进行在线系统辨识,具体为:
54、s-d1:定义对象的传递函数,确定系统传递函数的分母为2阶,分子为常数,定义需要辨识的传递函数参数为theta,递归最小二乘法的代数为l,同时定义协方差矩阵p来进行参数的误差估计,产生一组长度为l的随机白噪声,白噪声的方差为1,均值为0;
55、s-d2:在s3中生成的姿态信息叠加上s-d1产生的白噪声,其结果表示输入的真值;
56、s-d3:根据协方差矩阵p来计算参数估计的增益矩阵k;
57、s-d4:更新辨识出来的传递函数theta和协方差矩阵p;
58、s-d5:用本次的输入和输出来更新输入的上一次迭代值以及输出的上一次迭代值;
59、s-d6:重复执行s-d2到s-d5直到执行的代数到达l即停止;
60、s-d7:获取theta的值,用此时的theta值构建出系统的传递函数。
61、采用上述方案,通过递归的最小二乘法在线获得系统的参数,进而构建出系统的传递函数。
62、作为本发明的一种优选方案,s5中,根据s4得到的传递函数设为g(s),则前馈控制器的传递函数为1/g(s),那么前馈补偿+pi控制率设计τc如下:
63、
64、其中,el=ld-l为六个液压伸缩缸的位移误差,m为pi控制器,(ki为pi控制器中的积分变量,kp为pi控制器中的增益变量,为液压伸缩缸的位移误差的导数,用来表征速度误差,为液压伸缩缸的加速度,c为系统产生的扰动,为液压伸缩缸的速度,)为上平台期望位姿的导数,用来表征期望速度,qd表示上平台的期望位姿,ld表示液压伸缩缸的期望位移值。
65、采用上述方案,建立出了前馈补偿+pi反馈的控制器,在控制过程中适用性好,使用前馈补偿+pi反馈的复合控制方式,这样既有前馈控制及时,又有反馈控制精确的特点;实际使用中,使系统的误差完全为零是做不到的,但可使系统跟踪误差缩小到一定的允许范围,系统增加前馈和未增加前馈时,传递函数的极点是相同的,因此增加前馈控制不会影响系统的稳定性,却可以在不改变原系统参数和结构的情况下,大大提高系统的稳态精度,动态性能也比较容易得到保证,使得液压并联机构六自由度运动平台具有优良的运动控制性能。
66、本发明的有益效果:本发明提出一种有效的实现方法,用来对六自由度运动平台的前馈补偿+pi反馈控制器进行实现,pc生成特定的轨迹曲线,用来对六自由度运动平台进行开环控制;位置传感器采集开环控制后的六个液压伸缩缸的长度信息,经过正解还原成六自由度运动平台的姿态曲线;通过递归最小二乘法来获得系统的传递函数,建立可供实现的前馈补偿+pi反馈的控制器;前馈补偿+pi反馈的控制器控制六自由度运动平台,可以大大提高系统的稳态精度,动态性能也比较容易得到保证,使得液压并联机构六自由度运动平台具有优良的运动控制性能。
- 还没有人留言评论。精彩留言会获得点赞!