机器人运动控制方法、装置、计算机设备、介质和产品与流程
本技术涉及工业机器人控制,特别是涉及一种机器人运动控制方法、装置、计算机设备、存储介质和产品。
背景技术:
1、油浸式变压器作为电力系统重要设备,其运行状态直接影响着核电站的安全可靠运行。当油浸式变压器发生故障时,需要油下机器人来进行故障检查,而对油下机器人的机器人运动控制是进行故障检查的关键。
2、传统技术中,多采用增量式pid控制算法对机器人进行机器人运动控制。但是,在采用增量式pid控制算法对机器人进行机器人运动控制的过程中,存在机器人运动控制准确性较低的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种机器人运动控制方法、装置、计算机设备、介质和产品,能够提高机器人运动控制的准确性。
2、第一方面,本技术提供了一种机器人运动控制方法。所述方法包括:
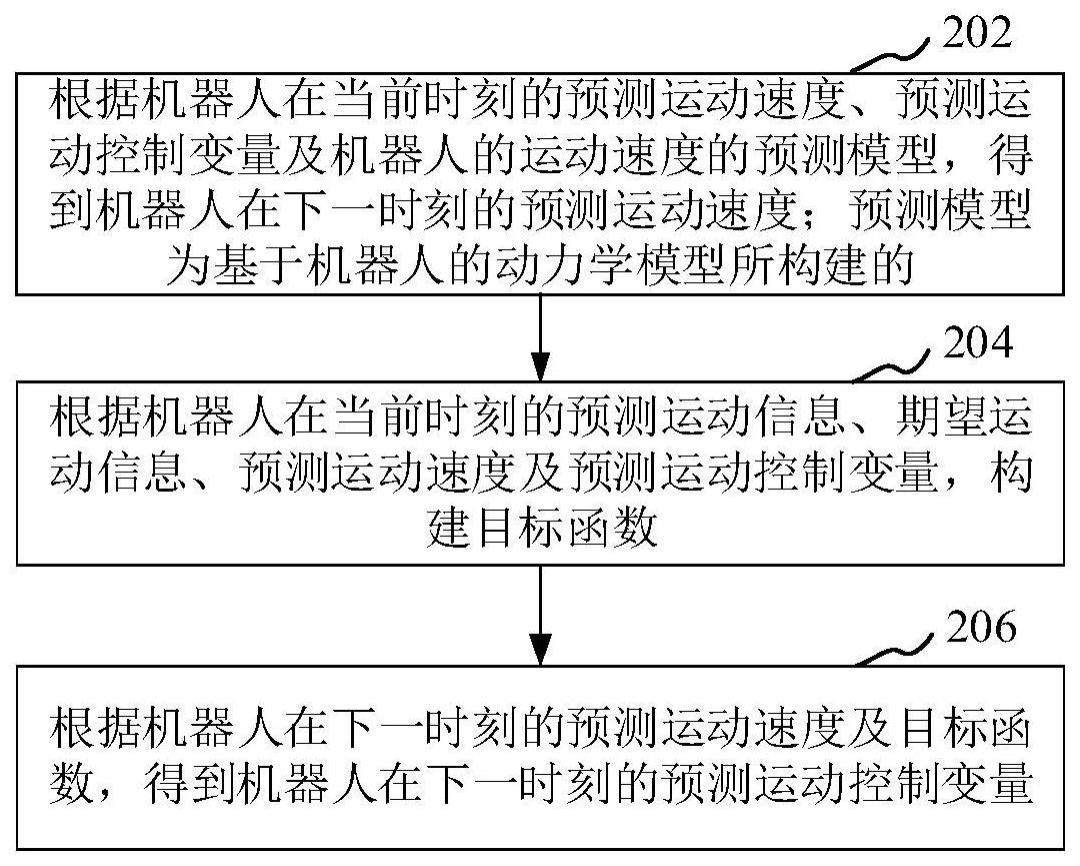
3、根据所述机器人在当前时刻的预测运动速度、预测运动控制变量及所述机器人的运动速度的预测模型,得到所述机器人在下一时刻的预测运动速度;所述预测模型为基于所述机器人的动力学模型所构建的;
4、根据所述机器人在当前时刻的预测运动信息、期望运动信息、预测运动速度及预测运动控制变量,构建目标函数;
5、根据所述机器人在下一时刻的预测运动速度及所述目标函数,得到所述机器人在下一时刻的预测运动控制变量。
6、在其中一个实施例中,所述方法还包括:
7、获取所述机器人的动力学模型;
8、对所述机器人的动力学模型进行线性化处理及离散化处理,得到所述机器人的运动速度的预测模型。
9、在其中一个实施例中,所述根据所述机器人在当前时刻的预测运动速度、预测运动控制变量及所述机器人的运动速度的预测模型,得到所述机器人在下一时刻的预测运动速度,包括:
10、对所述运动速度的预测模型进行增量化处理,得到所述运动速度的目标预测模型;
11、对所述机器人在当前时刻的预测运动速度、预测运动控制变量进行增量化处理,得到所述预测运动速度的增量及所述预测运动控制变量的增量;
12、将所述预测运动速度的增量及所述预测运动控制变量的增量输入至所述运动速度的目标预测模型中进行处理,得到所述机器人在下一时刻的预测运动速度的增量;
13、基于所述机器人在下一时刻的预测运动速度的增量及所述机器人在当前时刻的预测运动速度,得到所述机器人在下一时刻的预测运动速度。
14、在其中一个实施例中,所述将所述预测运动速度的增量及所述预测运动控制变量的增量输入至所述运动速度的目标预测模型中进行处理,得到所述机器人在下一时刻的预测运动速度的增量,包括:
15、获取所述运动速度的目标预测模型的预测时域及控制时域;
16、基于所述运动速度的目标预测模型的预测时域及控制时域对所述预测运动速度的增量及所述预测运动控制变量的增量进行处理,得到所述预测时域对应的所述预测运动速度的增量及所述预测运动控制变量的增量,并得到所述控制时域对应的所述预测运动速度的增量及所述预测运动控制变量的增量;
17、将所述预测时域对应的所述预测运动速度的增量及所述预测运动控制变量的增量,所述控制时域对应的所述预测运动速度的增量及所述预测运动控制变量的增量,输入至所述运动速度的目标预测模型中进行处理,得到所述机器人在下一时刻的预测运动速度的增量。
18、在其中一个实施例中,若所述预测运动信息包括预测深度信息,所述期望运动信息包括期望深度信息,则所述根据所述机器人在当前时刻的预测运动信息、期望运动信息、预测运动速度及预测运动控制变量,构建目标函数,包括:
19、获取所述机器人在当前时刻的预测深度信息、期望深度信息及第一权重矩阵、第二权重矩阵、所述机器人在当前时刻的预测运动控制变量;
20、对所述机器人在当前时刻的预测运动控制变量进行增量化处理,得到所述机器人在当前时刻的预测运动控制变量的增量;
21、计算所述机器人在当前时刻的预测深度信息、期望深度信息之间的差值,基于所述差值及所述第一权重矩阵,得到第一函数;
22、基于所述机器人在当前时刻的预测运动控制变量及所述第二权重矩阵,得到第二函数;
23、基于所述第一函数及所述第二函数,得到所述目标函数。
24、在其中一个实施例中,若所述预测运动信息包括预测姿态信息,所述期望运动信息包括期望姿态信息,则所述根据所述机器人在当前时刻的预测运动信息、期望运动信息、预测运动速度及预测运动控制变量,构建目标函数,包括:
25、获取所述机器人在当前时刻的预测姿态信息、期望姿态信息、第三权重矩阵及第四权重矩阵、所述机器人在当前时刻的预测运动控制变量;
26、对所述机器人在当前时刻的预测运动控制变量进行增量化处理,得到所述机器人在当前时刻的预测运动控制变量的增量;
27、计算所述机器人在当前时刻的预测姿态信息、期望姿态信息之间的差值,基于所述差值及所述第三权重矩阵,得到第三函数;
28、基于所述机器人在当前时刻的预测运动控制变量及第四权重矩阵,得到第四函数;
29、基于所述第三函数及所述第四函数,得到所述目标函数。
30、在其中一个实施例中,所述根据所述机器人在下一时刻的预测运动速度及所述目标函数,得到所述机器人在下一时刻的预测运动控制变量,包括:
31、对所述机器人在下一时刻的预测运动控制变量进行增量化处理,得到所述机器人在下一时刻的预测运动控制变量的增量;
32、获取所述机器人在下一时刻的预测运动控制变量的增量的阈值;
33、根据所述机器人在下一时刻的预测运动控制变量的增量的阈值及二次规划算法,得到所述机器人在下一时刻的预测运动控制变量的增量;
34、基于所述机器人在下一时刻的预测运动控制变量的增量及所述机器人在当前时刻的预测运动控制变量,得到所述机器人在下一时刻的预测运动控制变量。
35、第二方面,本技术还提供了一种机器人运动控制装置。所述装置包括:
36、预测模块,用于根据所述机器人在当前时刻的预测运动速度、预测运动控制变量及所述机器人的运动速度的预测模型,得到所述机器人在下一时刻的预测运动速度;所述预测模型为基于所述机器人的动力学模型所构建的;
37、目标函数构建模块,用于根据所述机器人在当前时刻的预测运动信息、期望运动信息、所述机器人在当前时刻的预测运动速度及预测运动控制变量,构建目标函数;
38、数据获取模块,用于根据所述机器人在下一时刻的预测运动速度及所述目标函数,得到所述机器人在下一时刻的预测运动控制变量。
39、第三方面,本技术还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述第一方面任一项所述的方法的步骤。
40、第四方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面任一项所述的方法的步骤。
41、第五方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述第一方面任一项所述的方法的步骤。
42、上述机器人运动控制方法、装置、计算机设备、介质和产品,其一,机器人的运动速度的预测模型是机器人的动力学模型所构建的,能较为准确地反映机器人在运动过程中各时刻的运动速度与运动控制变量之间的动力学关系,因此,根据机器人在当前时刻的预测运动速度、预测运动控制变量及机器人的运动速度的预测模型得到的机器人在下一时刻的预测运动速度也就较为准确;其二,目标函数是根据机器人在当前时刻的预测运动信息、期望运动信息、预测运动速度及预测运动控制变量构建的,能综合考虑预测运动信息、期望运动信息、预测运动速度及预测运动控制变量之间的关联关系;进而,根据较为准确的机器人在下一时刻的预测运动速度及目标函数,就能得到较为准确的机器人在下一时刻的预测运动控制变量。
- 还没有人留言评论。精彩留言会获得点赞!