一种机械手装置的制作方法
本发明涉及机器人,具体而言,涉及一种机械手装置。
背景技术:
1、随着我国对工业产业的升级转型规划的发展,对于劳动密集型产业的自动化改造需求愈发强烈。工业产业的自动化改造主要以机械手代替人工组装为主,通过机械手将待组装工件从上料工位抓取,并移动到组装工位进行组装。
2、现有技术中,在利用机械手进行产品组装时,通常以一台机械手抓取一个工件的方式进行上料,当某一产品所包含的工件数量较多时,往往需要进行多次夹取后放料,才能完成产品的组装,使工业产品的生产效率难以提升,从而降低企业的市场竞争力。
技术实现思路
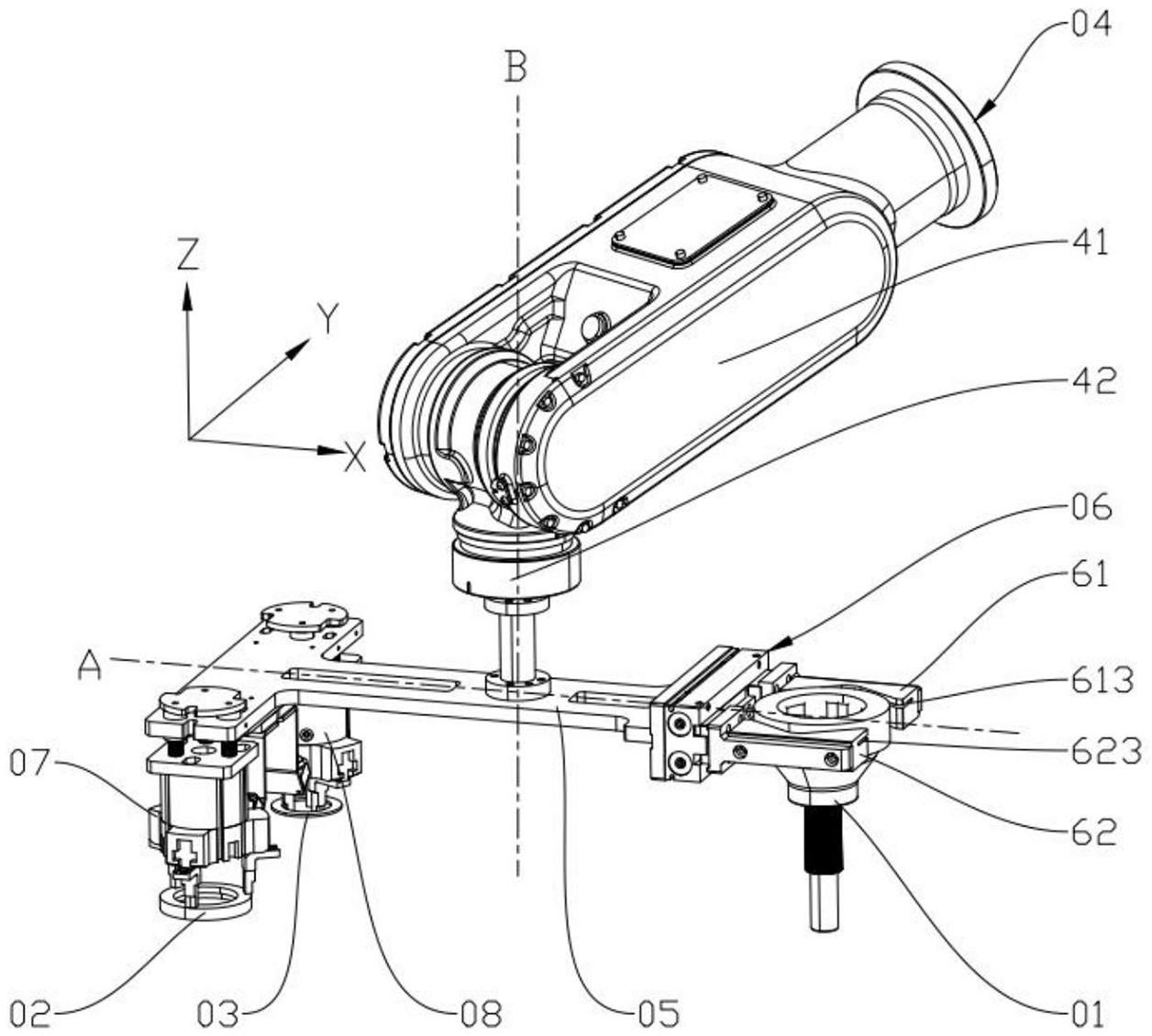
1、为解决现有机械手装置无法同时抓取多个零件的问题,本发明提供了一种机械手装置,所述机械手装置包括第一抓取机构、第二抓取机构、第三抓取机构、位置调整机构和安装座,其中,
2、所述第一抓取机构用于抓取第一工件,所述第二抓取机构用于抓取第二工件,所述第三抓取机构用于抓取第三工件;
3、沿长度方向,所述第一抓取机构安装在所述安装座的第一端,所述第二抓取机构和所述第三抓取机构安装在所述安装座的第二端,且所述第二抓取机构和所述第三抓取机构沿与所述长度方向垂直的宽度方向依次分布;
4、所述位置调整机构连接在所述安装座的中部,用于调整所述第一抓取机构、所述第二抓取机构、所述第三抓取机构和所述安装座的位置。
5、在一些实施例中,所述位置调整机构包括平移组件和旋转组件,其中,
6、所述旋转组件的第一端连接在所述安装座的中部,所述旋转组件用于带动所述第一抓取机构、所述第二抓取机构、所述第三抓取机构和所述安装座相对于所述平移组件沿第一轴线旋转;
7、所述旋转组件的第二端与所述平移组件连接,所述平移组件用于带动所述第一抓取机构、所述第二抓取机构、所述第三抓取机构、所述安装座和所述旋转组件移动。
8、在一些实施例中,所述安装座相对于与所述长度方向垂直的第二轴线镜像对称,且所述位置调整机构连接在所述第二轴线上。
9、在一些实施例中,所述第二抓取机构和所述第三抓取机构的形状、尺寸和重量均相同,且相对于所述第二轴线镜像对称设置在所述安装座的第二端。
10、在一些实施例中,
11、所述第一抓取机构包括第一夹爪、第二夹爪和第一驱动组件,其中,所述第一驱动组件安装在所述安装座的第一端;所述第一夹爪和所述第二夹爪中的至少一个与所述第一驱动组件连接,所述第一驱动组件用于驱动所述第一夹爪和所述第二夹爪中的至少一个沿所述宽度方向移动;
12、所述第一夹爪包括第一夹持面和第二夹持面,所述第一夹持面和所述第二夹持面与高度方向的夹角均相同;所述第二夹爪包括第三夹持面和第四夹持面,所述第三夹持面和所述第四夹持面与高度方向的夹角均相同;所述高度方向与所述长度方向和所述宽度方向均垂直。
13、在一些实施例中,所述第一工件的外壁面上具有第一卡接槽;所述第一抓取机构还包括第一安装件和第二安装件;
14、所述第一夹爪上设有第二卡接槽,所述第二卡接槽的开口至少部分位于所述第一夹持面和/或所述第二夹持面上;所述第二夹爪上设有第三卡接槽,所述第三卡接槽的开口至少部分位于所述第三夹持面和/或所述第四夹持面上;
15、所述第一安装件的第一端用于与所述第一卡接槽可拆卸连接,所述第一安装件的第二端用于与所述第二卡接槽可拆卸连接;
16、所述第二安装件的第一端用于与所述第一卡接槽可拆卸连接,所述第二安装件的第二端用于与所述第三卡接槽可拆卸连接。
17、在一些实施例中,所述第一夹持面和所述第三夹持面相对于所述第一工件的中心轴线镜像对称设置,所述第二夹持面和所述第四夹持面相对于所述第一工件的中心轴线镜像对称设置;所述第一驱动组件用于驱动所述第一夹爪和所述第二夹爪同时沿所述宽度方向移动,以使得所述第一抓取机构对不同尺寸的所述第一工件进行抓取时,不同尺寸的所述第一工件的中心轴线所在位置均相同。
18、在一些实施例中,所述第二抓取机构包括第三夹爪、第四夹爪和第二驱动组件,其中,所述第三夹爪的至少部分外周面与所述第四夹爪的至少部分外周面位于第一圆柱面上;
19、所述第二驱动组件安装在所述安装座的第二端,所述第三夹爪和所述第四夹爪中均与所述第二驱动组件连接,所述第二驱动组件用于驱动所述第三夹爪和所述第四夹爪共同朝向或者远离所述第一圆柱面的中心轴线运动。
20、在一些实施例中,所述第二抓取机构还包括第五夹爪,所述第五夹爪与所述第二驱动组件连接,所述第三夹爪的至少部分外周面、所述第四夹爪的至少部分外周面和所述第五夹爪的至少部分外周面均位于所述第一圆柱面上;所述第三夹爪、所述第四夹爪和所述第五夹爪环绕所述第一圆柱面的中心轴线均匀分布;所述第二驱动组件用于驱动所述第三夹爪、所述第四夹爪和所述第五夹爪共同朝向或者远离所述第一圆柱面的中心轴线运动。
21、在一些实施例中,所述第三夹爪包括沿高度方向依次设置的第一抓取部和第一限位部,所述第四夹爪包括沿所述高度方向依次设置的第二抓取部和第二限位部;
22、所述第一抓取部和所述第二抓取部的外周面均位于所述第一圆柱面上;所述第一限位部和所述第二限位部用于共同限制所述第二工件沿所述高度方向运动。
23、在一些实施例中,所述第二抓取机构还包括第一安装柱、第一弹簧、第一支架和第二支架;所述安装座的第二端具有第一安装孔;
24、所述第一安装柱沿所述高度方向设置,所述第一安装柱的第一端穿过所述第一安装孔并与所述第一支架固定连接;所述第一安装柱的第二端与所述第二支架固定连接;所述第一弹簧套设在所述第一安装柱的第二端,且所述第一弹簧的两端夹设在所述第二支架的上端面和所述第一安装柱的第一端的下端面之间;
25、所述第二驱动组件与所述第二支架固定连接;沿所述高度方向,所述安装座位于所述第一支架和所述第二支架之间。
26、在一些实施例中,所述第一安装柱、所述第一弹簧和所述第一安装孔的数量均为n个,n大于或者等于2;全部所述第一安装孔的中心轴线均位于第二圆柱面上。
27、在一些实施例中,所述第三抓取机构包括第六夹爪、第七夹爪和第三驱动组件,其中,所述第六夹爪的至少部分外周面与所述第七夹爪的至少部分外周面位于第二圆柱面上;
28、所述第三驱动组件安装在所述安装座的第二端,所述第六夹爪和所述第七夹爪中均与所述第三驱动组件连接,所述第三驱动组件用于驱动所述第六夹爪和所述第七夹爪共同朝向或者远离所述第二圆柱面的中心轴线运动。
29、在一些实施例中,所述第三抓取机构还包括第八夹爪,所述第八夹爪与所述第三驱动组件连接,所述第六夹爪的至少部分外周面、所述第七夹爪的至少部分外周面和所述第八夹爪的至少部分外周面均位于所述第二圆柱面上;所述第六夹爪、所述第七夹爪和所述第八夹爪环绕所述第二圆柱面的中心轴线均匀分布;
30、所述第三驱动组件用于驱动所述第六夹爪、所述第七夹爪和所述第八夹爪共同朝向或者远离所述第二圆柱面的中心轴线运动。
31、在一些实施例中,所述第六夹爪包括沿高度方向依次设置的第三抓取部和第三限位部,所述第七夹爪包括沿所述高度方向依次设置的第四抓取部和第四限位部;
32、所述第三抓取部和所述第四抓取部的外周面均位于所述第二圆柱面上;所述第三限位部和所述第四限位部用于共同限制所述第三工件沿所述高度方向运动。
33、在一些实施例中,所述第三抓取机构还包括第二安装柱、第二弹簧、第三支架和第四支架;所述安装座的第二端具有第二安装孔;
34、所述第二安装柱沿所述高度方向设置,所述第二安装柱的第一端穿过所述第二安装孔并与所述第三支架固定连接;所述第二安装柱的第二端与所述第四支架固定连接;所述第二弹簧套设在所述第二安装柱的第二端,且所述第二弹簧的两端夹设在所述第四支架的上端面和所述第二安装柱的第一端的下端面之间;
35、所述第三驱动组件与所述第四支架固定连接;沿所述高度方向,所述安装座位于所述第三支架和所述第四支架之间。
36、在一些实施例中,所述第二安装柱、所述第二弹簧和所述第二安装孔的数量均为m个,m大于或者等于2;全部所述第二安装孔的中心轴线均位于第三圆柱面上。
37、在一些实施例中,所述机械手装置还包括安装在所述安装座的第一端的第一测距机构,所述第一测距机构用于检测所述第二工件的放置方向。
38、在一些实施例中,所述机械手装置还包括安装在所述安装座的第一端的第二测距机构,所述第二测距机构用于检测所述第三工件的放置方向。
39、在一些实施例中,所述机械手装置还包括第一齿条、第一齿轮和第五支架;所述第一齿条沿所述宽度方向安装在所述安装座的第一端,且所述第一齿条位于所述第二抓取机构和所述第三抓取机构之间;
40、所述第一齿轮与所述第一齿条啮合连接,所述第五支架的第一端与所述第一齿轮固定连接,所述第一测距机构与所述第五支架的第二端固定连接。
41、在一些实施例中,所述机械手装置还包括第二齿轮、第六支架和第二测距机构;所述第二测距机构用于检测所述第三工件的放置方向;
42、所述第二齿轮与所述第一齿条啮合连接,所述第六支架的第一端与所述第二齿轮固定连接,所述第二测距机构与所述第六支架的第二端固定连接。
43、在一些实施例中,所述第一测距机构包括第一光线传感器,所述第一光线传感器发射的光线与高度方向的夹角大于或者等于30度,且小于或者等于45度。
44、在一些实施例中,所述第一测距机构包括第二光线传感器,所述第二光线传感器发射的光线与高度方向的夹角大于或者等于30度,且小于或者等于45度。
45、在一些实施例中,所述机械手装置还包括支撑座,所述支撑座用于沿高度方向依次支撑所述第二工件和所述第三工件,以使得当向所述第一工件施加沿所述高度方向的压力时,所述第二工件和所述第三工件可被套设于所述第一工件的外周面上。
46、为解决现有机械手装置无法同时抓取多个零件的问题,本发明有以下优点:
47、机械手装置包括第一抓取机构、第二抓取机构、第三抓取机构、位置调整机构和安装座,其中,第一抓取机构用于抓取第一工件,第二抓取机构用于抓取第二工件,第三抓取机构用于抓取第三工件。沿长度方向,第一抓取机构安装在安装座的第一端,第二抓取机构和第三抓取机构安装在安装座的第二端,且第二抓取机构和第三抓取机构沿与长度方向垂直的宽度方向依次分布。位置调整机构连接在安装座的中部,用于调整第一抓取机构、第二抓取机构、第三抓取机构和安装座的位置。在安装座上设置第一抓取机构、第二抓取机构和第三抓取机构,能够实现对三个零件的一次性抓取,自动化程度较高,有利于提高生产效率。
- 还没有人留言评论。精彩留言会获得点赞!