一种基于压电传感反馈的自调整智能吸头的制作方法
本发明属于智能控制检测调整,具体是涉及一种基于压电传感反馈的自调整智能吸头。
背景技术:
1、在吸取物体时,物体倾斜会造成吸头与吸取面之间无法完全贴合导致吸取成功率低。运用角度调整等设备调整吸取角度以此吸取倾斜物体,虽然能提高吸取成功率,但设备体积较大,价格昂贵,且适用性有限,不能实时监控物体吸取情况,对微小物体的吸取更为困难。
2、目前吸头技术主要集中在自适应、角度调整及传感器三个方面。例如申请号为201922185326.7的中国专利公开了一种组装光学镜头的吸头机构,其通过设置第一驱动装置驱动空心轴旋转,能调整吸头的吸取角度,从而达到调整镜片角度以优化与镜筒的组装角度的目的,提升组装良品率和组装效率;通过设置第二驱动装置驱动空心轴沿z向升降,能感应吸头上的压力并调整吸头与镜片间的距离,从而达到调整吸取力和组装压力的目的,避免或减轻对镜片的损伤,提升组装良品率。但是其创新集中在调整角度有关的应用,在自适应应用没有过多创新。申请号为202020839018.1的中国专利公开了一种自适应吸料机械手,其机械手安装座与吸盘安装座使用球形轴承连接,使得吸盘安装座可以绕轴承作空间摆动,并通过四个拉簧吸盘正常情况下呈水平状态,当吸附物料的倾斜面时,弹簧自适应物料表面,完成吸附,吸附适应能力强,结构简单,经济实用。但是其创新主要集中在自适应吸取物表面便于吸取,对传感器应用创新较少。申请号为202220765385.0的中国专利公开了一种用于贴片机的高稳定性吸嘴,其具有较高的稳定性,提高吸嘴吸取电子元件时的稳定性,且保证吸孔的通气,使吸嘴的整体吸力稳定。但是其创新主要集中在传感器的应用上,对压电传感器还有待创新的地方。
3、在吸取应用中,存在需要吸取极小物体的情况,此时弹簧、电机等在调整角度时显得过于粗笨且大,对于吸取情况也难以检测,所以对传感器自适应调整角度的吸头还有待创新。
技术实现思路
1、本发明的目的是,为克服上述不足,提供一种基于压电传感反馈的自调整智能吸头,克服了吸头调整器件过于笨重问题及吸取不稳等问题,同时克服了不能实时监测物体的掉落情况的问题,实现轻量化、小量化,可随处安装。
2、本发明的技术方案是:
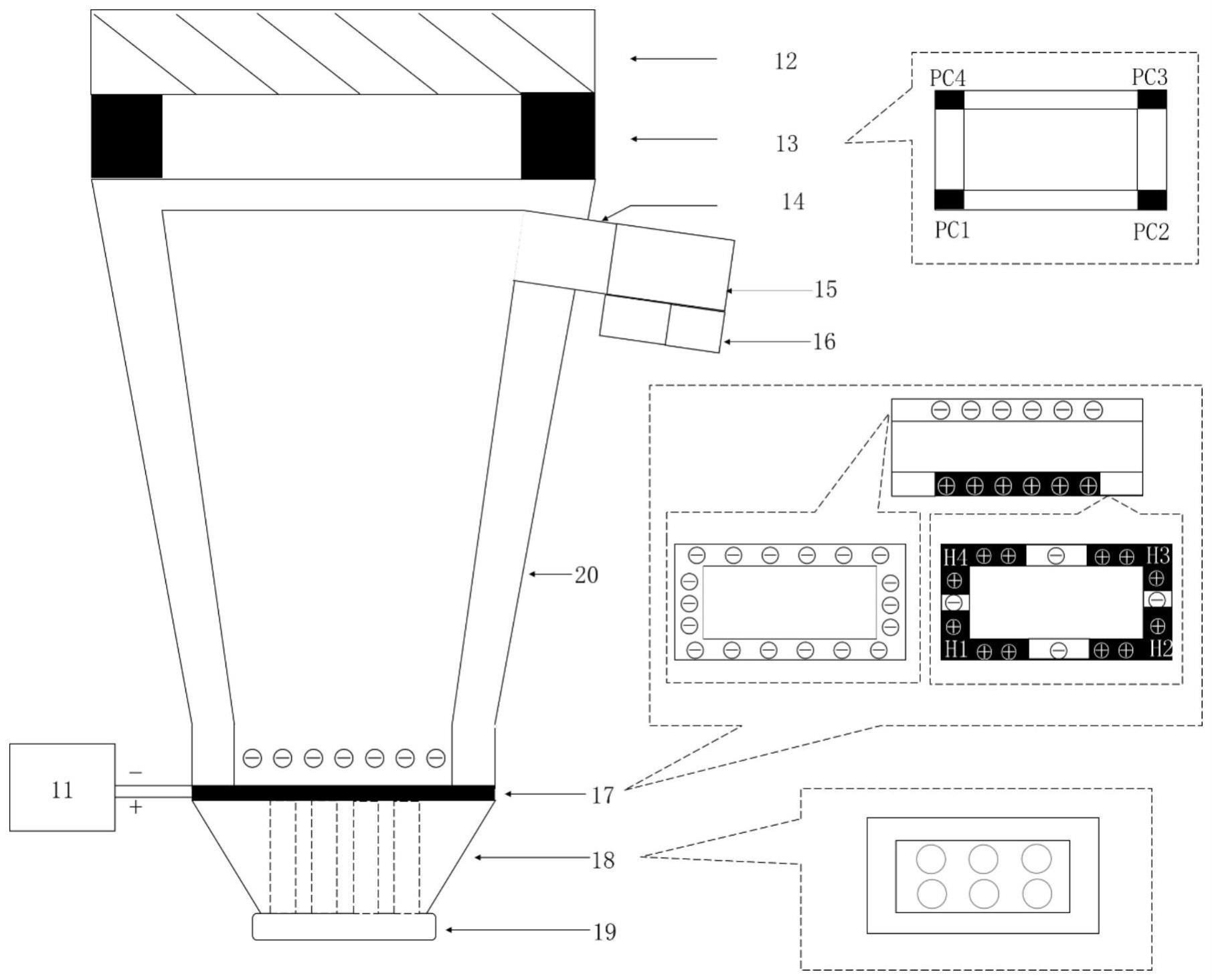
3、一种基于压电传感反馈的自调整智能吸头,包括反馈控制器11、底座12、压电调节支架13、真空发生器接孔14、真空发生器15、电磁阀16、传感层17、孔洞层18、缓冲层19和腔体层20;
4、所述底座12用于为吸头提供支撑,所述压电调节支架13的一端与底座12连接,压电调节支架13的另一端与腔体层20的一端连接,压电调节支架13用于在电场作用下发生形变,从而带动腔体层20在垂直方向发生角度偏移;
5、所述腔体层20为中空结构,其靠近压电调节支架13的一端侧面设置有真空发生器接孔14,所述真空发生器接孔14用于将腔体层20内部与真空发生器15连通,所述电磁阀16设置在真空发生器15上用于控制真空发生器15;
6、所述传感层17设置在腔体层20的另一端,所述传感层17为压电陶瓷,传感层17与腔体层20相连的一端为正极,传感层17的负极与孔洞层18相连,孔洞层18与缓冲层19相连,所述孔洞层18为具有多个沿垂直方向的通孔,通孔用于将传感层17与缓冲层19电气连接;
7、所述反馈控制器11的正负极分别与传感层17的正负极相连,所述反馈控制器11用于根据接收到的传感层17产生的信号来产生控制信号控制压电调节支架13发生形变,使得吸头能够自适应调整姿态以贴合被吸附物体。
8、进一步的,所述反馈控制器11根据接收到的传感层17传输的正负极电压,获得电压差来进行倾角计算,具体方法为:将传感层17的正极分为多个独立部分,每个正极与孔洞层18的一个通孔对应,使缓冲层接触到被吸附物体时,每个正极均产生独立的形变从而获得不同的电压信号,反馈控制器11根据每个电压信号的产生时间及大小,计算出被吸附物体的倾斜角度,从而生成对应的控制信号控制压电调节支架13发生形变来调整吸头的姿态,使吸头与被吸附物体之间贴合。
9、进一步的,所述传感层17的正极分为4个部分,分别定义为第一正极、第二正极、第三正极和第四正极,相对应的压电调节支架13也分为4个部分,分别定义为第一支架、第二支架、第三支架和第四支架;定义在吸附物体时,4个正极分别产生的电信号为第一电信号e1、第二电信号e2、第三电信号e3和第四电信号e4,每个电信号最高峰的产生时间分别定义为第一电信号产生时刻t1、第二电信号产生时刻t2、第三电信号产生时刻t3和第四电信号产生时刻t4;其中第四电信号的最高峰定义为u4max;根据获得的4个电信号产生时间,判断最早时间与最晚时间之间的差值是否在设定的阈值范围内,若是,则反馈控制器11不产生控制信号,否则,分别根据获得的时间信号及吸头自身物理特性计算出倾斜角度,从而得出支架pc1、pc2、pc3、pc4分别所需调整的长度h1,h2,h3,h4;根据第四电信号的最高峰u4max是否在设定的阈值范围内,若是,则整体长度h不需要调整,否则,根据第四电信号的最高峰u4max与设定阈值u′的差值对整个支架进行调整;得到各支架所需调整长度进而由反馈控制器11产生对应的控制信号。
10、进一步的,分别根据获得的时间信号及吸头自身物理特性计算出倾斜角度,从而得出每个支架所需调整的长度的具体方法是:
11、对4个支架分别进行角度计算,整体调整的计算方式为:
12、h=f(|u4max-u′|)
13、其中,h是整体需要调整的高度,u4max为第四电信号的最高峰,u′为设定阈值,函数f由传感器层17中的压电陶瓷(pet5)本身性质决定;
14、第一支架的计算方式为:
15、h1=w1sinθ1+h
16、
17、其中,θ1是压电调节支架pc1处倾斜的角度,v是吸头下落速度,w1是缓冲层19的宽度,h1是第一支架需要调整的高度,w2是底座12的宽度;
18、第二支架的计算方式为:
19、
20、
21、其中,θ2是压电调节支架pc2处倾斜的角度,h2是第二支架需要调整的高度,l1是缓冲层19的长度,w1是缓冲层19的宽度,l2是底座12的长度,w2是底座12的宽度;
22、第三支架的计算方式为:
23、h3=l1sinθ3+h
24、
25、其中,θ3是压电调节支架pc3处倾斜的角度,h3是第三支架需要调整的高度,l1是缓冲层19的长度,l2是底座12的长度;
26、第四支架的计算方式为:
27、h4=h
28、其中,h4是第四支架需要调整的高度。
29、基于获得的需要调整的高度,通过函数f获得需要施加的电压
30、un=f(hn),n=1,2,3,4
31、其中函数f由压电调节支架13本身性质决定。
32、本发明的有益效果是:
33、(1)本发明中使用传感器,并将传感器拆分为四部分分别与反馈控制器连接,利用压电效应检测物体吸取情况及倾斜角度,可有效提高吸取的准确率,降低生产成本及生产难度,实现小型化和轻量化,为可自适应调整角度的吸头设计提供一种新的思路。
34、(2)本发明使用压电调节支架,利用压电效应进行吸嘴角度的调整,通过计算得到的倾斜角对压电调节支架施加不同电压达到需要调整的角度,使吸取面贴合吸头,可有效提高吸取的准确率。
- 还没有人留言评论。精彩留言会获得点赞!