飞机系统管路自动抓取及运输装置与方法与流程
本发明属于飞机系统管路装调,涉及一种飞机系统管路自动抓取及运输装置与方法。
背景技术:
1、随着人工智能和自动化技术的发展,制造业不断向智能化制造时代迈进。汽车制造生产随工程机械行业的迅猛发展逐渐趋于专业化和规模化,机械臂、机械手等大量自动化设备在汽车领域内被普遍使用,极大的提升了汽车制造业的产能与质量。但在飞机系统管路装配过程中未能应用人工智能和自动化技术,存在生产效率低,人员操控性不好,劳动强度高等问题,制约着飞机制造业产能。随着军用飞机的数量需求增大以及民用客机、无人机的技术高速发展,传统的纯手工作业模式无法满足新环境下的需求。
2、飞机制造行业中系统管路安装部分未能使用人工智能和自动化技术的主要原因为机上实际操作空间有限,同时需要安装的系统管路零件多,现有机械臂无法通过简单的程序设定实现管路的运输与安装工作,且飞机制造行业对系统管路的信息及安装位置较汽车行业有着更严格的规定。目前的飞机系统管路运输方法仍为操作者按照图纸及管路信息,肉眼挑选相应管路并手动运输至安装区域,此形式存在工作效率低、人工识别存在错误风险、操作者工作强度大等缺点。
技术实现思路
1、为实现飞机系统管路自动运输,节省操作者劳动强度、提升装配质量并提高工作效率,本发明提供了一种飞机系统管路自动抓取及运输装置与方法,应用于飞机系统管路安装工程中,通过工业相机,识别需要安装的系统管路,实现自动抓取并运输至安装位置供操作者使用,可极大提高工作效率、降低错误率并降低操作者劳动强度。
2、本发明的技术方案如下:
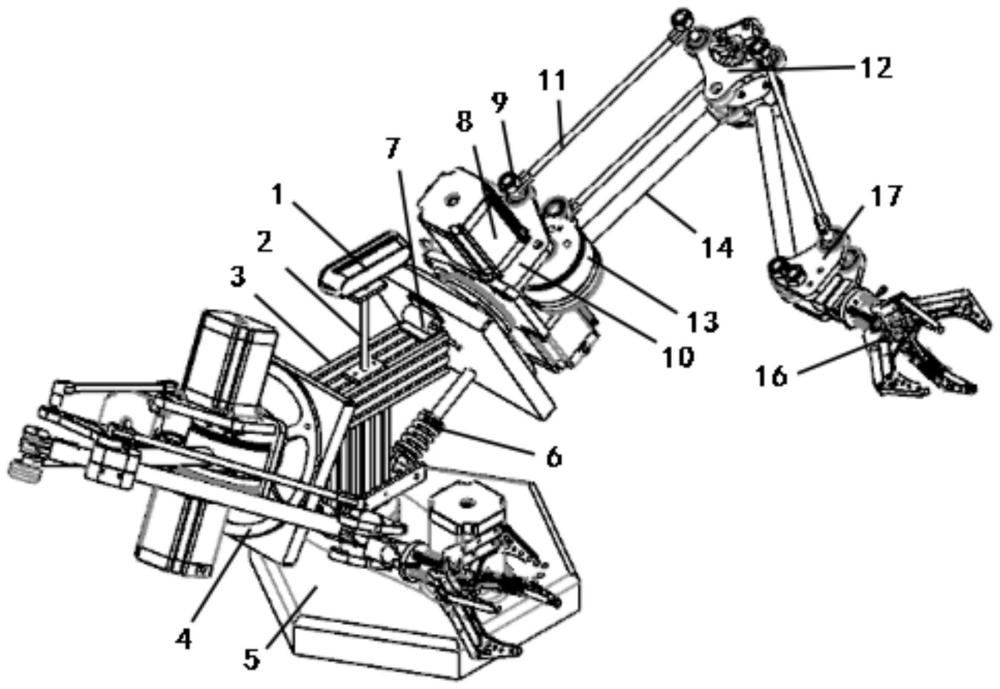
3、一种飞机系统管路自动抓取及运输装置,是一种多自由度全方位机械抓手,为左右对称结构,包括工业相机1、可调支撑杆2、承力支座3、机械转盘4、底座5、缓冲扭簧6、机械转盘角度调整部件7、驱动电机8、拉杆固定部件9、电机固定底座10、一级传动拉杆11、传动系统过渡支座12、钢索轮盘13、操纵钢索14、二级传动拉杆15、机械手16和机械手固定支座17。
4、所述的承力支座3为t型结构,其底端安装在底座5上,承力支座3的上部为中空结构,内部设有驱动机械转盘4转动的电机;所述的可调支撑杆2安装在承力支座3的上表面,工业相机1安装在可调支撑杆2的顶端,用于对系统管路以及飞机位置的图像采集;所述的机械转盘4共两个,对称安装在承力支座3的两侧;所述的机械转盘4包括底盘、转轴和转盘,底盘中心设有通孔,转轴通过通孔,其底端与承力支座3内部的电机输出轴连接,其顶端安装有底盘;底盘的下表面与承力支座3上部的侧面通过机械转盘角度调整部件7连接,通过机械转盘角度调整部件7可调整机械转盘4的角度;底盘的下表面与承力支座3下部的侧面通过两根连接轴和一个缓冲扭簧6实现连接,两根连接轴的一端分别与底盘的下表面和承力支座3下部的侧面连接,另一端通过缓冲扭簧6连接,缓冲扭簧6用于减缓机械手工作过程中产生的反作用力;每个机械转盘4的转盘上均安装有一个电机固定底座10,电机固定底座10上对称安装两块立板,钢索轮盘13安装在两个立板之间,两个驱动电机8安装电机固定底座10上,在两块立板的外侧,驱动电机8的输出轴与钢索轮盘13的收放装置连接,驱动操纵钢索14的收放,从而驱动一级传动拉杆11和二级传动拉杆15的运动;两块立板的侧面上均安装有一个拉杆固定部件9,传动系统过渡支座12的两端各安装有两个拉杆固定部件9以及用于操纵钢索14穿过的通孔,机械手固定支座17的一端安装有两个拉杆固定部件9以及用于操纵钢索14穿过的通孔;一级传动拉杆11的一端与两块立板上的拉杆固定部件9连接,另一端与传动系统过渡支座12一端的拉杆固定部件9连接;二级传动拉杆15的一端与传动系统过渡支座12另一端的拉杆固定部件9连接,另一端与机械手固定支座17上的拉杆固定部件9连接;钢索轮盘13上的操纵钢索14依次穿过传动系统过渡支座12与机械手固定支座17上的通孔后,与机械手16连接,所述的机械手16安装在机械手固定支座17的前端,通过操纵钢索14操控。
5、一种飞机系统管路自动抓取及运输方法,采用上述装置,具体步骤如下:
6、步骤1.图像识别
7、通过多自由度全方位机械抓手上的工业相机1,在装配现场对待装系统管路进行实时拍照,获取图像信息传输至计算机系统,再通过视觉处理软件对图像进行处理,对图像中的字符进行识别,利用光学技术和计算机技术把刻印在系统管路表面的管路信息读取出来;得到图像中的信息后,将信息与预先输入的装备信息库进行对比,分析判断出待装导管的位置,实现对系统管路的零件号自动匹配识别以及位置自动计算。
8、步骤2.图像增强
9、图像识别过程中,进行图像增强,实现图像灰度直方图的均衡化,而图像灰度直方图均衡化处理的关键点就在于扩充,即将原有图像的直方图范围增大,从而实现扩充的目的,同时,为了实现图像画质的协调性,需对整个图像进行扩充。具体实现直方图修正即图像增强过程如下:
10、
11、其中,wm为扩充并均衡化后的直方图范围,wl为扩充前的直方图范围,k为增强系数,通常为固定值;公式右侧中分母为图像为n个点数时随从正态分布的概率密度函数,n为图像总点数,σ为标准差,μ为均值,e为自然对数的底数。
12、步骤3.抓取位置确认
13、工业相机1识别出目标管路后,对目标管路外形进行图像识别,同时工业相机1中内设判定模块,预先存储目标管路的理论数模,理论数模有管路尺寸、重量、材料、理论重心(抓取导管中心点)等基本信息;工业相机1将识别出的图像与理论数模做对比,得到目标管路的实际图像与理论图像的偏差,对应得到目标的实际重心位置即实际抓取导管中心点坐标,多自由度全方位机械抓手将按照导管中心点坐标进行抓取与运输。
14、步骤4.自动抓取及运输
15、多自由度全方位机械抓手工作时,机械转盘4转动将机械抓手16调整为大概的工作位置,驱动电机8工作输出动力,经过操纵钢索14以及一级传动拉杆11、传动系统过渡支座12、二级传动拉杆15、机械手固定支座17将动力传递至机械手16上,同时,操纵钢索14对机械抓手16的位姿进行精准调整,实现对导管的抓取,运输过程工作原理一致,从而实现系统管路的自动抓取及运输。
16、本发明的有益效果:
17、(1)本发明采用智能图像识别技术,即光学字符识别技术,利用光学技术和计算机技术把刻印在系统管路表面的管路信息读取出来,实现对系统管路的零件号自动匹配识别、位置自动计算及缺陷自动检测,可以实现对导管的精准识别,改变原有人工挑选过程,提升工作效率;
18、(2)本发明设计图像增强技术,采取图像增强方法对图像质量进行提高。采用直方图修正能够使得原图像灰度集中的区域分布更为均匀,从而增大反差,使图像的细节更清楚,达到图像增强的目的,并在matlab中实现直方图修正;
19、(3)本发明中,在工业相机识别出目标管路后,设定系统对目标导管图像中心点坐标定位。以目标导管的n个角点为基准,通过多阶矩阵定义,得到抓取导管几何中心点的图像坐标,便于对导管识别:
20、(4)本发明提供一种全新的多自由度全方位机械抓手,配合图像采集、图像增强、位置获取等方式,由系统自动判定导管信息、装机位置等驱动使用,结构简单、便于操作,可实现对导管的多自由度全方位抓取及运输;
21、(5)本发明提供独特的设计思路,基于工业制造行业中智能化与自动化的技术基础,适应军机制造行业系统管路实际生产需求,可有效解决痛点、难点,实现体质增效。
- 还没有人留言评论。精彩留言会获得点赞!