基于磁感应力觉自解耦的多功能电子皮肤及其制备方法与流程
本发明涉及电子皮肤,具体地,涉及一种基于磁感应力觉自解耦的多功能电子皮肤及其制备方法。
背景技术:
1、触觉传感器可以赋予机器人通过接触来感知外部环境并与之交互的能力,在机器人灵巧操作、人机共融、模式识别等领域有着重要的应用。与人类皮肤相比,现有的机器人触觉传感器还存在较大差距,例如为了实现力的解耦,往往需要设计复杂的传感器结构(如刚性梁)或拟合复杂的数学模型;在实现解耦的情况下,尚无法同时实现超分辨率检测;等等,极大的限制了机器人在执行复杂任务上的能力。目前,根据对外界刺激信号的转换与检测原理不同,柔性触觉传感器可主要分为压阻式、电容式、压电式触觉传感器、摩擦自生电式触觉传感器、光学式触觉传感器、电磁式触觉传感器等。但每种传感器都有各自的缺陷,可在同一个传感器中引入多种传感技术,如通过pvdf压电薄膜测量动态力,再通过添加电阻或电容敏感元件,就可以制造出一个既可以感知动态力又可以测量静态力的传感器。电磁式触觉传感器将被测量在导体中感生的磁通量变化,转换成输出信号变化,选用霍尔件制成的传感器较其它材料制成的传感器灵敏度和线性度更佳。
2、专利202010812264.2提供一种介入式弱磁与压力感知系统,用于光纤传感及医疗领域。该系统主要部件是一个光纤传感探头,此探头由两个光纤f-p传感器组成,其中一个光纤f-p传感器是由fp腔和玻璃膜片组成的压力传感器,另外一个光纤f-p传感器由内置对弱磁敏感物质的f-p腔和刚性膜片组成。该系统主要功能为感知体内组织或器官的弱磁及压力,无法使用为电子皮肤触觉感知。
3、专利202010546155.0公开了一种检测压力的磁膜传感器,由传感器壳体、设于传感器壳体内的弹性薄膜、设于弹性薄膜上的磁性材料块、设于传感器壳体内之弹性薄膜下方的pcb板、设于pcb板上的磁感应芯片、设于pcb板底部的信号传输针脚或信号传输连接线组成,传感器壳体的上面设有第一导气孔,pcb板设有第二导气孔。弹性薄膜置于传感器壳体的中部,将传感器壳体隔为上下两个腔体,两个腔体为弹性薄膜在压力作用下的形变空间。弹性薄膜由压力产生的振动或形变,磁感应芯片检测到磁场信号值经mcu单元输出压力信号值,或mcu单元通过与标定的压力值对比判断输出对应的控制信号。此传感器主要应用于电子烟、医疗器具的气管插管等产品上,检测单一方向上力的大小,无法实现开放条件下多方向上力的判别。
4、专利202110837037x公开了一种硅基mems单元结合线圈阵列的柔性多模式触觉传感器,包括底板、弹性体、硅基memes压力传感器单元、磁体、磁感应线圈阵列;弹性体、硅基memes压力传感器单元与磁感应线圈阵列设置于底板;磁体设置于弹性体中。使用硅基mems测压单元,无导电复合材料的电阻蠕变和电容式测压单元寄生电容的影响,精度高、稳定性良好;磁感应线圈阵列通过电磁感应产生电信号检测切向力的方向和大小,精度高,响应快,适合于动态力测量和滑动状态的检测。虽然此传感器实现了触觉力的方向和大小检测,无法实现温湿度的检测,可见此传感器的功能还是单一。
5、多功能电子皮肤期望能够像人体皮肤一样柔软,还能感知环境的温度、压力、湿度等多种信息。当电子皮肤感知到多种刺激源后,如何将多种信息进行解耦,获取力的大小和方向,从而顺利实现对物体的精准定位以及执行各种操作(比如抓握)任务,仍然是面临的重大困难。虽然在特定功能的电子皮肤的辅助下,智能机器人系统或假肢利用触觉信息进行运动轨迹规划、物体操纵、安全操作,并从环境中获取各种信息。但对于自由度越来越高的刚体机器人,传统扭矩传感器昂贵且难以部署,因此开发柔性、高灵敏度、高空间分辨率、多模态的多功能电子皮肤是实现高效感知和控制的重要一步。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种基于磁感应力觉自解耦的多功能电子皮肤及其制备方法。
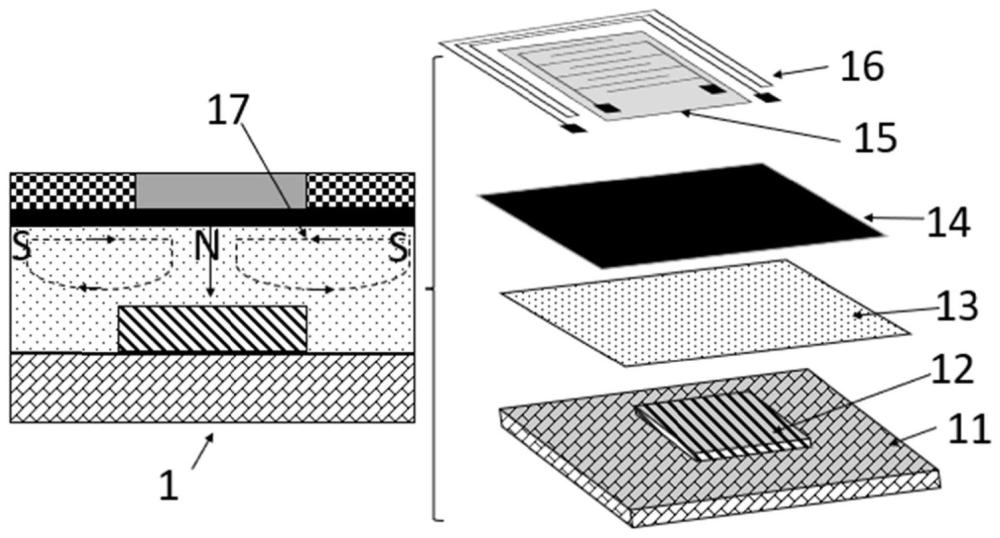
2、根据本发明提供的一种基于磁感应力觉自解耦的多功能电子皮肤,多功能电子皮肤包括由下至上依次设置的:基底电路板、磁感应芯片、填充层、磁膜以及湿度传感器,所述湿度传感器的周围绕设有温度传感器。
3、优选地,所述基底电路板、所述磁感应芯片、所述填充层、所述磁膜配合形成有力觉自解耦的压力传感器。
4、优选地,所述填充层上设置有磁感应线。
5、优选地,所述磁膜包括正弦磁化后带有磁性的柔性薄膜,所述填充层填充有具有弹性的硅胶,所述磁感应芯片包括霍尔磁感应传感器。
6、优选地,所述湿度传感器包括银浆打印的叉指电极,其上修饰有湿敏材料膜,所述湿敏材料膜包括mwcnts、pmma以及koh合成材料,其质量混合比例为0.001:1:0.01。
7、优选地,所述温度传感器包括铜浆打印的温度敏感电阻线条,所述温度传感器多圈绕设在所述湿度传感器的三侧边。
8、优选地,所述多功能电子皮肤与用户终端软件系统电连接;
9、所述用户终端软件系统集成力觉自解耦算法,根据公式能够分析感应磁场强度获取力的大小、方向和位置;
10、
11、其中fz为正向力,fx为切向力,s是接触面积,e、g和h分别是所述填充层的弹性模量、剪切模量和厚度,k为磁场波数,b(z1)和b(z0)分别为在z1和z0处的磁通量,rb(x1)为在x1处x方向上的磁通量和z方向的磁通量的比值,c1和c2是弹性模量和剪切模量的补偿系数,b1和b2是偏置系数。
12、优选地,所述多功能电子皮肤贴附安装在机器手表面,所述机器手用于抓取物体(3),所述基底电路板设置在靠近所述机器手的一侧。
13、优选地,所述多功能电子皮肤贴附安装在机器人表面,所述多功能电子皮肤能够在横向方向构建大面积阵列式传感器单元。
14、根据本发明提供的一种制备上述的基于磁感应力觉自解耦的多功能电子皮肤的方法,包括以下步骤:
15、步骤s1,设计制作基于所述磁感应芯片的所述基底电路板,集成温度和湿度检测电路,然后焊接所述磁感应芯片,贴附所述填充层;
16、步骤s2,在所述磁膜上表面打印所述温度传感器,打印叉指电极;
17、步骤s3,配置湿敏材料,在叉指电极上涂覆湿敏材料;
18、步骤s4,所述磁膜下表面贴附至所述填充层上构成所述多功能电子皮肤。
19、与现有技术相比,本发明具有如下的有益效果:
20、1、本发明的多功能电子皮肤由多种传感器按照所设计的合理结构布局实现多功能感知,温度传感器利用金属温度敏感特性获取温度值,湿度传感器利用叉指电极检测湿敏材料电阻特性改变获取湿度值,磁感应力觉自解耦的压力传感器利用霍尔传感器在当有外力施加于磁膜上时,测量到由磁膜变形所引起的磁场变化,进而可以测量出所施加外力的大小和方向,正向力和切向力解析无串扰。
21、2、本发明中多功能电子皮肤可贴附在机器人手指表面进行物体的抓取与监测,能够解析当前抓取物体的信息(温度、湿度、正向力以及切向力),通过力反馈进行柔顺抓取物体;多功能电子皮肤的尺寸可根据机器手指面大小制作;多功能电子皮肤也可贴附安装在机器人表面(如手臂上),多功能电子皮肤还能够在横向方向构建大面积阵列式传感器单元。
- 还没有人留言评论。精彩留言会获得点赞!