一种基于肌电信号的机器人灵巧手控制系统
本发明属于机器人灵巧手控制,具体涉及一种基于肌电信号的机器人灵巧手控制系统。
背景技术:
1、随着科技的不断进步和人工智能的日益成熟,机器人技术已成为现代科研和工业领域的焦点。特别是在高精度和高灵活性的机器人灵巧手抓取技术方面,其应用前景和研究价值日益凸显。然而,目前的机器人灵巧手抓取技术往往依赖于对物体属性的先验知识,这在处理未知或多变属性的物体时可能遇到困难。因此,有必要探索新的方法,通过捕捉和解析人类的生物信号来指导机器人灵巧手的抓取力度,从而实现更加灵活和智能的抓取控制。
2、肌电信号是由人体肌肉活动产生的电信号,可以通过非侵入性的可穿戴设备(如肌电手环)采集得到,实时获取有关人体手臂肌肉收缩和力度的信息,用于预测和控制机器人灵巧手的抓取力度。然而,肌电信号信号的处理和解析是一个具有挑战性的任务,因为它们是多变量时间序列数据,包含复杂的时间依赖性和非线性关系。
3、另一方面,遥控操作是指远程控制和操作机器人的技术,对于人类难以或无法亲自进入的环境可以远程控制机器人进入其中执行任务,但对于一些易碎或可变性的物体,现有的机器人灵巧手抓握方案存在损坏物体的潜在风险。基于位置的抓握方法不是很灵活,因为它只能控制末端执行器的位置,而不能控制其力或扭矩。这使得它在需要精确力控制的任务中受到限制。另一方面,基于接触模型的方法需要先验知识输入,这使得将这些检测方法应用于未知对象变得具有挑战性。
4、综上所述,尽管目前已有一些基于肌电信号信号的机器人灵巧手抓取研究,但仍然存在一些限制和挑战,特别是在实时预测抓取力和实现灵活抓取方面。因此开发一种基于肌电信号的机器人灵巧手多模态遥操作方法及系统是非常有必要的。这不仅可以提高机器人灵巧手的抓取效率和准确性,还可以为机器人技术的进一步发展和应用提供有力的支持。
技术实现思路
1、本发明旨在解决现有技术的不足,提出一种基于肌电信号的机器人灵巧手控制系统,该系统无需对物体的属性(如形状、重量和表面摩擦)有任何先验知识,从而使机器人灵巧手能够灵活且适应地抓取各种物体。
2、为实现上述目的,本发明提供了如下方案:
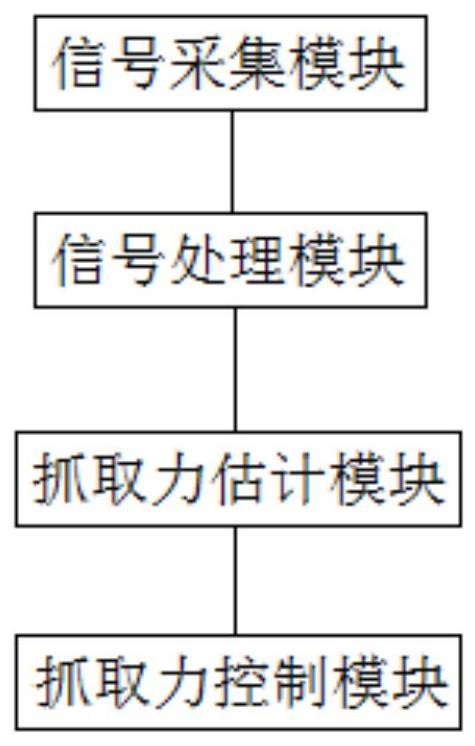
3、一种基于肌电信号的机器人灵巧手控制系统,包括:信号采集模块、信号处理模块、抓取力估计模块和抓取力控制模块;
4、所述信号采集模块用于采集人体前臂的肌电信号和所述机器人灵巧手的实时抓取力;
5、所述信号处理模块用于对所述肌电信号进行预处理得到处理后肌电信号,所述信号处理模块还用于对所述实时抓取力进行预处理得到处理后实时抓取力;
6、所述抓取力估计模块用于基于所述处理后肌电信号和所述处理后实时抓取力生成预期抓取力;
7、所述抓取力控制模块用于基于所述处理后实时抓取力和所述预期抓取力,实时调控所述机器人灵巧手的抓取力。
8、优选的,所述信号采集模块包括:肌电信号采集单元和抓取力采集单元;
9、所述肌电信号采集单元用于采集人体前臂的所述肌电信号;
10、所述抓取力采集单元设置在所述机器人灵巧手上,所述抓取力采集单元用于采集所述实时抓取力。
11、优选的,所述信号处理模块包括:肌电信号处理单元和抓取力处理单元;
12、所述肌电信号处理单元利用快速傅里叶变换和巴特沃斯滤波对所述肌电信号进行去噪,得到所述处理后肌电信号;
13、所述抓取力处理单元利用快速傅里叶变换和巴特沃斯滤波对所述实时抓取力进行去噪,并利用savitzky-golay滤波器对处理后数据进行进行平滑处理和异常值消除,得到所述处理后实时抓取力。
14、优选的,所述肌电信号处理单元包括:第一去噪子单元和第一滤波子单元;
15、所述第一去噪子单元用于对所述肌电信号利用快速傅里叶变换进行处理,抓取过程中的所述肌电信号的功率谱密度,从而进行去噪,得到第一数据;
16、
17、其中,x(k)为第k个频率分量的幅值,x(n)为时间域上的第n个样本,n为样本数量;
18、所述第一滤波子单元利用巴特沃斯滤波器对所述第一数据进行低通滤波,得到所述处理后肌电信号。
19、优选的,所述抓取力处理单元包括:第二去噪子单元、第二滤波子单元和异常消除子单元;
20、所述第二去噪子单元用于对所述实时抓取力利用快速傅里叶变换进行处理,得到第二数据:
21、
22、其中,x(k)为第k个频率分量的幅值,x(n)为时间域上的第n个样本,n为样本数量;
23、所述第二滤波子单元利用巴特沃斯滤波器对所述第二数据进行低通滤波,得到所述处理后数据;
24、所述异常消除子单元利用savitzky-golay滤波器对所述处理后数据进行平滑处理和异常值消除,得到所述处理后实时抓取力:
25、
26、其中,yi为平滑后的数据点,xi+j为原始数据点,cj为多项式系数,m为窗口系数。
27、优选的,所述抓取力估计模块包括:网络构建单元、网络训练单元和估计单元;
28、所述网络构建单元用于构建深度学习网络,所述深度学习网络包括:1个输入层、2个长短时记忆网络层、2个正则化层、1个全连接层和1个输出层;
29、所述网络训练单元用于对所述深度学习网络进行训练,得到训练后网络;
30、所述估计单元用于基于所述处理后肌电信号和所述处理后实时抓取力,利用所述训练后网络生成所述预期抓取力。
31、优选的,所述训练的流程包括:
32、通过所述深度学习网络向前传播计算所述预期抓取力,并与所述处理后实时抓取力进行比较,计算均方误差损失和r2决定系数;
33、所述均方误差损失的计算方法包括:
34、
35、其中,yi为实时抓取力,为预测抓取力,n是样本数量;
36、所述r2决定系数的计算方法包括:
37、
38、其中,m为样本数量,为所有样本预测力的平均值,yi第i个样本的实际力值,为第i个样本的预测力值。
39、优选的,所述抓取力控制模块的工作流程包括:获取所述处理后实时抓取力和所述预期抓取力的差异,并基于比例-积分-微分的控制器策略调整所述机器人灵巧手的所述抓取力。
40、优选的,所述控制器策略包括:
41、
42、pdes(n)=pdes(n-1)+δpdes(n)
43、其中,e=fref-freal为电压单位为单位的力误差,fref为预测力值,freal为真实力值,pdes为发送到内部位置回路所需的位置,kp为比例系数,ki为积分系数,kd为微分系数。
44、与现有技术相比,本发明的有益效果为:
45、本发明采用肌电信号驱动的机器人灵巧手多模态遥操作,将人体前臂的肌电信号转化为机器人灵巧手的精确抓取力控制,实现了人机协同的高效和谐操作,适用于精确、灵活和顺应性的抓取操作,克服了传统机器人灵巧手操作灵活性差、顺应性低的问题,有助于提高机器人灵巧手抓取效率和质量。
- 还没有人留言评论。精彩留言会获得点赞!