模块自动识别及智能定位抓取装置的制作方法
本发明涉及一种工业控制系统模块自动化生产检测领域,特别涉及一种模块自动识别及智能定位抓取装置。
背景技术:
1、工业控制系统是数据采集与监视控制系统、分布式控制系统、过程控制系统、可编程逻辑控制器和其他控制系统的总称,工业控制通过工业计算机对传感器及局域网所采集的信息进行归纳、分析、整理,根据预设的算法实现执行器的自动控制功能,能够提高生产效率,提高控制的反应速度。
2、在目前的生产过程中,定制化的i/o模块的产品测试成为了制约i/o模块生产效率的关键路径,常见的测试方法为手动测试及配套工装进行半自动测试,此时均需要至少一名有经验的熟练员工进行操作,此过程费时费力,并且无法持续的进行,生产效率低,同时该员工也需要有一定的技术知识,用于保证操作的正确性,不同i/o模块的测试项不同,想熟练掌握每个i/o模块的测试项,或对其进行测试工作,均需要一定的执行经验,以及问题发现和处理经验,该过程极大的影响了工业控制系统生产及成套组装的进度,成为制约项目进度的一大关键因素。
技术实现思路
1、本发明要解决的技术问题是为了克服现有技术中不同i/o模块的产品测试需要熟练人员进行操作,且过程费时费力,生产效率低的缺陷,提供一种模块自动识别及智能定位抓取装置。
2、本发明是通过下述技术方案来解决上述技术问题:
3、一种模块自动识别及智能定位抓取装置,其特点在于,其包括:
4、机械臂;
5、抓取机构,所述抓取机构连接于所述机械臂,且所述抓取机构用于抓取待测模块;
6、摄像头识别模块,所述摄像头识别模块连接于所述机械臂上,且所述摄像头识别模块用于对所述待测模块进行拍摄以识别所述待测模块的类型。
7、在本方案中,采用上述结构形式,抓取机构和摄像头识别模块均安装连接在机械臂上,通过机械臂驱动摄像头识别模块和抓取机构的移动,摄像头识别模块将用于对不同类型的待测模块进行识别,从而无需熟练员工熟练掌握每个i/o模块的测试项;抓取机构将用于对不同类型的待测模块进行抓取,抓取机构将抓取后的待测模块送至上位机测试程序,根据上位机返回的测试结果,抓取机构将待测模块放置到测试通过的下料框或者测试不通过的下料框内。在上料框到位后无需人工操作,配合上位机的测试程序即可完成上料框内所有模块的测试工作。相比传统的检测方法,实现了整套测试流程的全自动化,无需人工操作,减少了人力劳动,消除了人工放置测试模块错误的情况,从而能够用于减少模块生产后进行测试时的人员需求,降低人力成本,提高了测试和生产的效率。
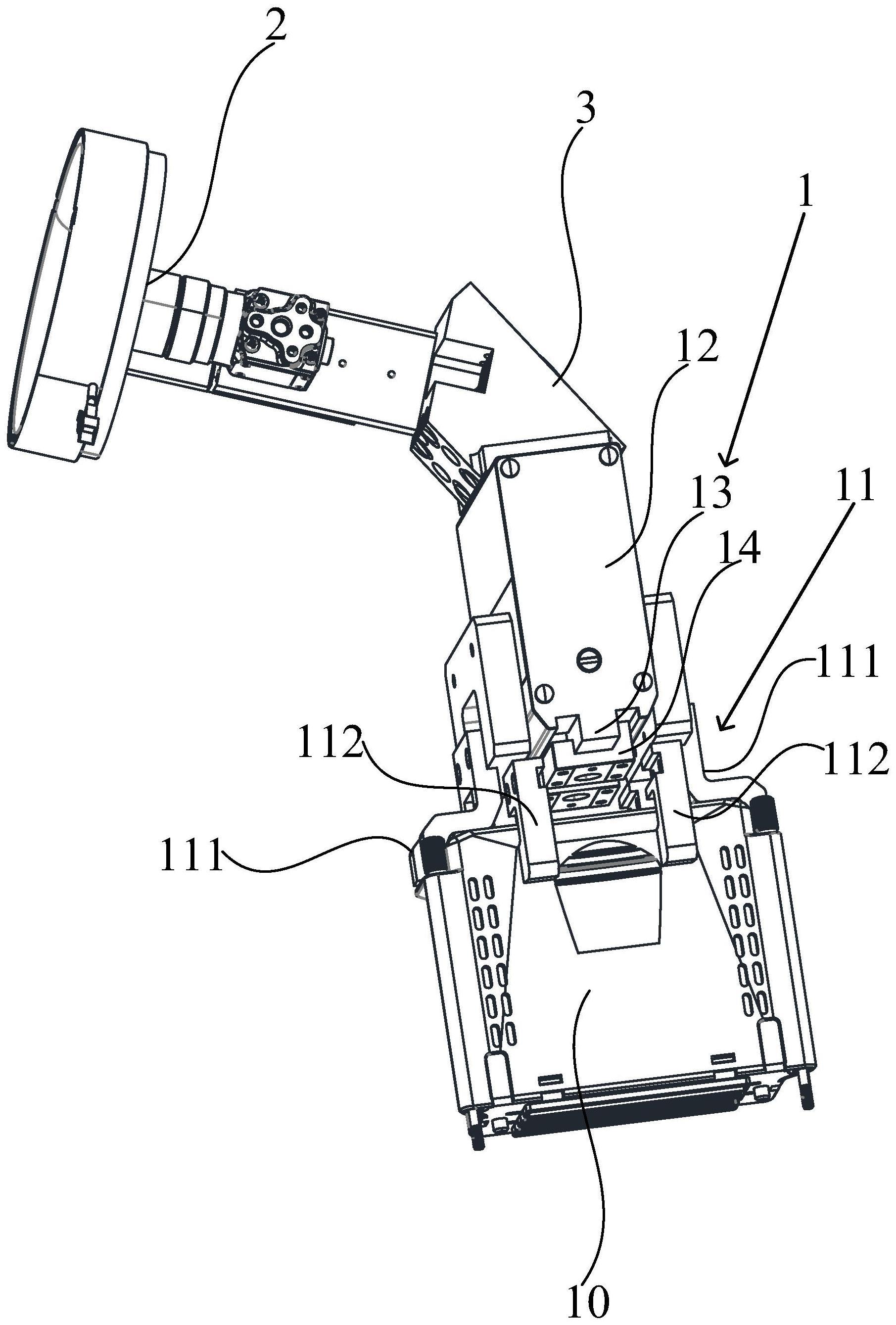
8、较佳地,所述抓取机构包括固定座和抓手部件,所述固定座的一端连接于所述机械臂,且所述抓手部件连接于所述固定座的另一端,所述抓手部件用于抓取所述待测模块。
9、在本方案中,采用上述结构形式,固定座固定安装连接在法兰盘上,抓手部件安装连接在固定座上并用于抓取待测模块。
10、较佳地,所述抓手部件包括限位抓手和可移动抓手,所述限位抓手固定连接于所述固定座上,所述可移动抓手连接于所述固定座并能够在所述固定座上移动,以使所述限位抓手和所述可移动抓手均抵靠于所述待测模块的外表面上并用于抓取所述待测模块。
11、在本方案中,采用上述结构形式,限位抓手将固定安装在固定座上并无法移动,可移动抓手将通过伺服电机驱动可移动抓手在固定座上移动,从而实现抓手部件能够实现对不同类型的待测模块进行抓取,稳定性更高。
12、较佳地,所述限位抓手和所述可移动抓手的数量均为两个,两个所述限位抓手分别连接于所述固定座的一相对两侧,两个所述可移动抓手分别连接于所述固定座的另一相对两侧,且两个所述可移动抓手在所述固定座上能够沿靠近或者远离的方向移动,以使两个所述限位抓手和两个所述可移动抓手分别作用力于所述待测模块的四个侧面上。
13、在本方案中,采用上述结构形式,通过两个限位抓手和两个可移动抓手将用于夹持待测模块的四个侧面,从而实现对待测模块的稳定抓取,稳定性更高。
14、较佳地,所述抓取机构还包括导轨和滑块,所述导轨连接于所述固定座,所述可移动抓手连接于所述滑块上,所述滑块连接于所述导轨并在所述导轨上移动。
15、在本方案中,采用上述结构形式,可移动抓手安装连接在滑块上通过滑块在导轨上移动,从而实现相对设置的两个可移动抓手之间能够相互靠近夹持或者相互远离松开,使得可移动抓手沿既定的方向移动并稳定抓取待测模块,进一步提高了模块自动识别及智能定位抓取装置的稳定性。
16、较佳地,所述模块自动识别及智能定位抓取装置还包括法兰盘,所述法兰盘的一侧可旋转地连接于所述机械臂的末端,所述抓取机构和所述摄像头识别模块分别连接于所述法兰盘的另一侧的两端。
17、在本方案中,采用上述结构形式,抓取机构和摄像头识别模块都通过法兰盘可旋转地安装连接于机械臂上,通过法兰盘的旋转将带动抓取机构和摄像头识别模块的切换使用并分别用于识别和抓取操作。
18、较佳地,所述摄像头识别模块包括ccd视觉单元和判定单元,所述ccd视觉单元连接于所述机械臂上,所述ccd视觉单元用于对所述待测模块拍摄影像,所述判定单元的输入端电连接于所述ccd视觉单元,所述判定单元的输出端电连接于所述抓取机构和所述机械臂。
19、在本方案中,采用上述结构形式,机械臂受调度程序控制,接收上位机的指令,执行规定动作,在上料框通过ccd视觉单元拍摄待测模块的图片,并通过判定单元识别待测模块的类型,将待测模块抓取到对应的测试工位后,并通过ccd视觉单元拍摄待测模块上的条形码或二维码信息传送至上位机,上位机确认条形码或二维码信息合法后,测试工位的压紧装置进行下压,同时进行上电。
20、较佳地,所述机械臂为六轴机械臂。
21、在本方案中,采用上述结构形式,通过六轴机械臂使得动作迅速、且精确度更高,进一步提高了测试和生产的效率以及稳定性,保证高效运行。
22、较佳地,所述模块自动识别及智能定位抓取装置还包括补光灯,所述补光灯连接于所述摄像头识别模块和/或所述机械臂上。
23、在本方案中,采用上述结构形式,补光灯具有照明功能,使得摄像头识别模块能够对待测模块上的二维码或条形码进行拍摄影像清晰度更高,提高了模块自动识别及智能定位抓取装置的稳定性。
24、较佳地,所述模块自动识别及智能定位抓取装置还包括移动机构,所述移动机构连接于所述机械臂的底部并用于带动所述机械臂移动至工位上。
25、在本方案中,采用上述结构形式,通过移动机构将驱动机械臂的移动至指定位置,使得机械臂能够精确移动至上料工位、测试工位以及下料工位上,从而实现自动化控制,提高了测试和生产的效率。
26、在符合本领域常识的基础上,上述各优选条件,可任意组合,即得本发明各较佳实例。
27、本发明的积极进步效果在于:
28、本发明的模块自动识别及智能定位抓取装置,通过机械臂驱动摄像头识别模块和抓取机构的移动,摄像头识别模块将用于对不同类型的待测模块进行识别,抓取机构将用于对不同类型的待测模块进行抓取,无需人工操作,从而能够用于减少模块生产后进行测试时的人员需求,全面大幅提高生产效率,降低人力成本。
- 还没有人留言评论。精彩留言会获得点赞!