一种机械臂末端手车操控执行机构及其使用方法与流程
本发明涉及机械臂装置,尤其涉及一种机械臂末端手车操控执行机构及其使用方法。
背景技术:
1、工业机器人是广泛应用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。
2、变电站是电力系统中变换电压、接受和分配电能、控制电力的流向和调整电压的电力设施,其中的中置柜(即金属铠装中置开关机械设备)属于高压配电设备,用于接收和配置互联网电磁能,操作和维护电力工程电源电路、监控和准确测量电力电路。中置柜常用于发电站、变电站和工矿企业事业单位等。中置柜一般为手车式,通过操纵中置柜上的手车运动来实现对开关的控制。
3、由于中置柜属于高压配电设备,为避免工作人员在从事电气工作时,发生触电等事故,必须使用的具备绝缘功能的安全器具来进行操作。其中安全器具分为基本安全用具和辅助安全用具。基本安全用具是绝缘强度能长时间承受电气设备工作电压的作用的安全用具,其可以直接操作电压电气设备,如绝缘操作杆、绝缘夹钳等。辅助安全用具为绝缘强度不能长时间承受电气设备工作电压的作用的安全用具,即起加强基本安全用具的保安作用,如绝缘手套、绝缘靴、绝缘鞋等。但由于中置柜手车操作过程中需要对转轴旋拧多次,无论是使用基本安全用具还是佩戴辅助安全用具,对中置柜手车进行操作时,都会费时费力,而且容易发生触电等危险。
4、随着工业机器人技术的成熟,其应用领域越来越多,但目前还没有工业机器人可以用于控制中置柜手车。而对于变电站广泛使用的中置柜手车,设计符合要求的机械臂末端执行机构来执行操控手车的任务不仅可以提高工作效率,也可以保证相关从业人员的安全。
技术实现思路
1、针对上述问题,本发明提供一种机械臂末端手车操控执行机构及其使用方法。
2、为实现上述目的,本发明所采用的技术方案为:
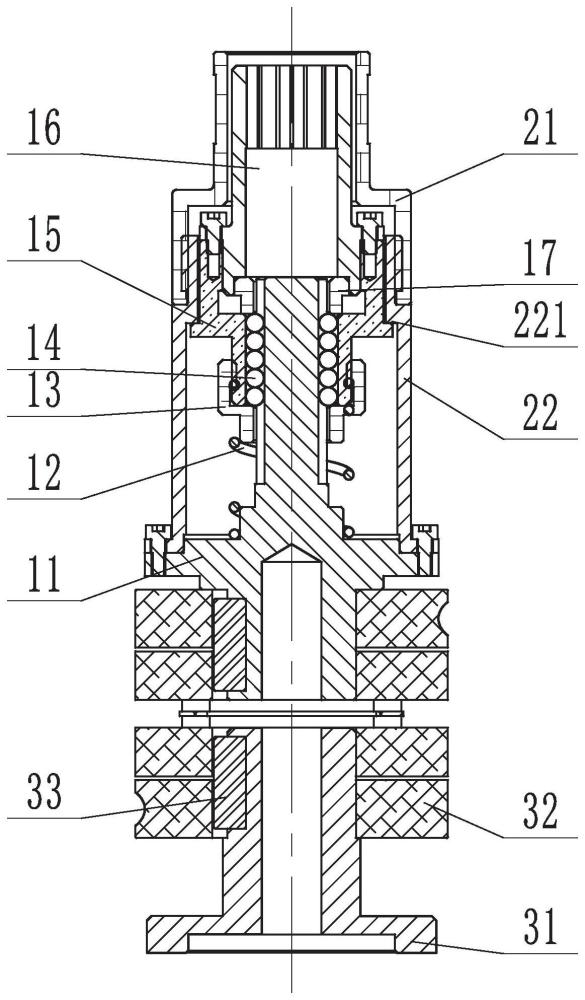
3、一种机械臂末端手车操控执行机构,所述机械臂末端手车操控执行机构包括旋拧机构和解锁机构;
4、旋拧机构包括导向轴、弹性件、端盖和滑套;
5、导向轴上同轴线套设有弹性件、端盖和滑套,弹性件一端与导向轴一端固定连接,弹性件另一端与端盖一端固定连接;通过将弹性件安装在导向轴和端盖之间,可以保证弹性件伸缩运动时的精度和运动的稳定性;
6、端盖为截面略大于导向轴截面的中空凸台结构,端盖另一端连接有一滑套,滑套为截面略大于导向轴截面的中空凸台结构;
7、滑套上远离端盖的一端固定连接有套筒;
8、解锁机构包括套筒压盖和弹簧护套;弹簧护套一端与导向轴上和弹性件固定连接的一端固定连接,且弹簧护套套设于弹性件、端盖和滑套外侧;
9、弹簧护套另一端与套筒压盖连接,便于拆卸,同时套筒压盖套设有套筒外侧;手车的转轴末端同轴线设有弹簧锁紧机构,需要按压解锁,在使用过程中,套筒压盖末端(即套筒压盖远离弹簧护套的一端)接触转轴末端的弹簧锁紧机构,套筒的梅花形孔与转轴对准,由于套筒压盖固定,套筒可伸缩运动,整个机械臂末端手车操控执行机构继续向手车方向运动,套筒压盖按压弹簧锁紧机构对其进行解锁。
10、进一步的,套筒远离滑套的一端(即套筒末端)设有梅花形孔,中置柜的手车的轴头为截面是正方形的转轴,套筒上的梅花形孔一般设为八边形孔,在套筒上的梅花形孔与手车的转轴对准过程中,能够有效提高对准效率,同时,梅花形孔在与转轴对准过程中,结合导向轴上安装的刚度较小的弹性件的缓冲作用,不仅可以减小转轴末端与套筒末端的梅花形孔连接过程中冲击力,使两者易于接合,也可以保证套筒末端与转轴末端充分接触;
11、套筒压盖对弹簧锁紧机构解锁后,随着机械臂末端手车操控执行机构转动,套筒的梅花形孔与转轴末端逐渐结合在一起,转轴嵌入套筒的梅花形孔。
12、进一步的,滑套与导向轴之间设有凹槽,凹槽内设有滚珠,在使用过程中依靠滚珠实现在按压过程中的平稳的轴向移动和旋拧过程中的力矩传递。
13、进一步的,滑套和套筒之间还装有压盖,压盖为中空结构,同样套设于导向轴,并被滑套和套筒固定夹设于两者之间,压盖远离套筒的一端与滚珠接触,防止滚珠滚出。
14、进一步的,机械臂末端手车操控执行机构还包括连接机构,连接机构与导向轴连接。
15、进一步的,连接机构包括与机械臂连接的旋转轴和单膜片联轴器;
16、旋转轴通过单膜片联轴器与导向轴实现夹紧连接,单膜片联轴器靠其自身膜片的弹性变形来补偿所连两轴的相对位移,是一种高性能的金属强元件挠性联轴器,可以保证在机械臂驱动电机轴线与手车转轴轴线在转动过程中存在相对位置变化时,也能正常传递转矩,使手车的转轴平稳转动。
17、进一步的,旋转轴和单膜片联轴器之间通过平键进行连接,以保证力矩传递。
18、进一步的,弹簧护套上还设有限位部,在使用前限位部与滑套接触,用于限制滑套移动位置,防止使用完成后弹性件力度过大,套筒弹出套筒压盖。
19、进一步的,端盖与滑套之间通过螺纹连接;
20、滑套和套筒之间通过螺钉连接;
21、弹簧护套与导向轴之间通过螺钉连接;
22、弹簧护套与套筒压盖之间通过螺纹连接。
23、一种机械臂末端手车操控执行机构的使用方法,所述使用方法具体如下:
24、机械臂与所述机械臂末端手车操控执行机构上的旋转轴连接,通过机械臂上的摄像头通过采集图像进行定位,确定手车的转轴和机械臂末端手车操控执行机构的相对坐标(x、y、z三轴),并计算出机械臂末端手车操控执行机构向转轴方向移动的运动轨迹(即运动距离),利用常规的后台控制程序控制机械臂末端手车操控执行机构运行至转轴位置,控制机械臂末端手车操控执行机构上的套筒压盖接触转轴的弹簧锁紧机构,并控制套筒的梅花形孔与转轴对准,由于套筒压盖固定,套筒可伸缩运动,整个机械臂末端手车操控执行机构继续向手车方向运动,套筒压盖按压弹簧锁紧机构对其进行解锁,转轴末端与梅花形孔接触并通过按压套筒(即按压套筒的梅花形孔末端)进而压缩弹性件(此时套筒相对于套筒压盖向远离手车的方向移动),弹性件压缩到一定程度时,此时控制机械臂末端手车操控执行机构整体进行旋转,伴随机械臂末端手车操控执行机构的旋转套筒的梅花形孔一并旋转,此时转轴未发生转动,当梅花形孔转动一定角度后,梅花形孔与转轴对准,弹性件瞬间将套筒弹出(即弹性件使套筒向转轴方向移动),此时转轴嵌入套筒的梅花形孔内,实现套筒与转轴的充分对接,继续控制机械臂末端手车操控执行机构整体进行旋转,带动转轴转动,实现对手车上的转轴的旋拧,经旋拧多圈达到手车开关所需调整的状态后,机械臂驱动机械臂末端手车操控执行机构停止旋转,再带动整个机械臂末端手车操控执行机构向远离手车的方向移动,套筒逐渐与转轴分离,套筒压盖与弹簧锁紧机构分离,手车的转轴的弹簧锁紧机构自动锁紧,此时,手车的开关调整动作完成。
25、本发明的一种机械臂末端手车操控执行机构及其使用方法的有益效果为:
26、本发明的一种机械臂末端手车操控执行机构能够操控手车,提高工作效率,省时省力,确保相关从业人员的安全,而且能够避免发生触电等危险;
27、本发明的一种机械臂末端手车操控执行机构整体结构紧凑,重量轻,结构简单,易于装卸,可安装于机械臂末端实现对变电站中置柜手车的操控,确保在冲击较小的情况下其套筒上的梅花形孔充分和手车上的转轴末端接触,操作可靠性高;
28、本发明的一种机械臂末端手车操控执行机构通过将弹性件安装在导向轴和端盖之间,可以保证弹性件伸缩运动时的精度和运动的稳定性;
29、本发明的一种机械臂末端手车操控执行机构通过将套筒一端设为梅花形孔,与截面是正方形的转轴配合,能够有效提高梅花形孔与转轴对准过程中的对准效率;同时,梅花形孔在与转轴对准过程中,结合导向轴上安装的刚度较小的弹性件的缓冲作用,不仅可以减小转轴与梅花形孔连接过程中冲击力,使两者易于接合,也可以保证套筒末端与转轴末端充分接触;
30、本发明的一种机械臂末端手车操控执行机构通过滑套与导向轴之间设有滚珠,在使用过程中依靠滚珠实现在按压过程中的平稳的轴向移动和旋拧过程中的力矩传递;
31、本发明的一种机械臂末端手车操控执行机构通过单膜片联轴器连接旋转轴与导向轴,单膜片联轴器靠其自身膜片的弹性变形来补偿所连两轴的相对位移,是一种高性能的金属强元件挠性联轴器,可以保证在机械臂驱动电机轴线与手车转轴轴线在转动过程中存在相对位置变化时,也能正常传递转矩,使手车的转轴平稳转动;
32、本发明的一种机械臂末端手车操控执行机构通过在旋转轴和单膜片联轴器之间设置平键,保证旋转轴和导向轴连接,以保证力矩传递;
33、本发明的一种机械臂末端手车操控执行机构通过弹簧护套上还设有限位部,在使用前限位部与滑套接触,用于限制滑套移动位置,防止使用完成后弹性件力度过大,套筒弹出套筒压盖。
- 还没有人留言评论。精彩留言会获得点赞!