用于RPV顶盖隔热套筒测量或维修的环轨机器人和方法与流程
本发明涉及rpv顶盖隔热套筒测量及维修,尤其涉及一种用于rpv顶盖隔热套筒测量或维修的环轨机器人和方法。
背景技术:
1、控制棒驱动机构隔热套筒安装在反应堆压力容器顶盖的控制棒驱动套管贯穿件内,由于受到堆芯内流体介质的冲击振动,上端头磨损导致隔热套筒整体位置下移,磨损严重时,甚至发生隔热套筒整体掉落。鉴于此问题的危害性,有必要在大修期间通过先进测量技术手段来定量评估顶盖内隔热套筒磨损情况,同时对磨损隔热套筒进行及时的维修及更换作业。除控制棒驱动套管贯穿件外,rpv顶盖上还均匀分布安装有若干个热电偶贯穿件,为一体式固定结构,不存在磨损下降问题。在换料大修期间,顶盖由核岛吊装至顶盖专用存放区域,坐落在3个导向固定墩上。因顶盖内部直接与一回路水接触,环境剂量较高,按照核电厂辐射管理要求,属于最高辐射剂量区域,人员禁止进入,顶盖法兰下方屏蔽墙的门洞是进出顶盖的唯一通道。
2、对控制棒驱动机构隔热套筒的现有测量和维修平台通常采用agv小车进行,并不附带调平措施,由于顶盖存放间地面为普通厂房地面,通常水平度较差,作为测量基准或会对测量引入较大的误差。同时,由于隔热套筒安装的特殊性,并不存在标准安装高度,只能通过固定喇叭口高度和位姿的热电偶隔热套筒等作为参考来判断因磨损产生的下降,需要在测量时具有一致的测量基准。但热电偶隔热套筒数量有限,往往只有4个,通过agv小车进行测量时,往往需要测量头具备较大的测量范围可一次覆盖至少一个热电偶隔热套筒,大的测量范围与测量头的精度是存在矛盾的,因此无法实现高精度的测量和作业。另外,当前针对隔热套筒磨损的测量应用大多为针对单个待测隔热套筒的局部测量设备与方法,并未考虑实际应用中的问题,测量精度存在系统偏差,精度难以保证。
技术实现思路
1、本发明的目的在于提供一种用于rpv顶盖隔热套筒测量或维修的环轨机器人和方法,解决了rpv顶盖隔热套筒磨损量测量缺少准确测量方法的问题。
2、为了实现上述目的,本发明提供如下技术方案:
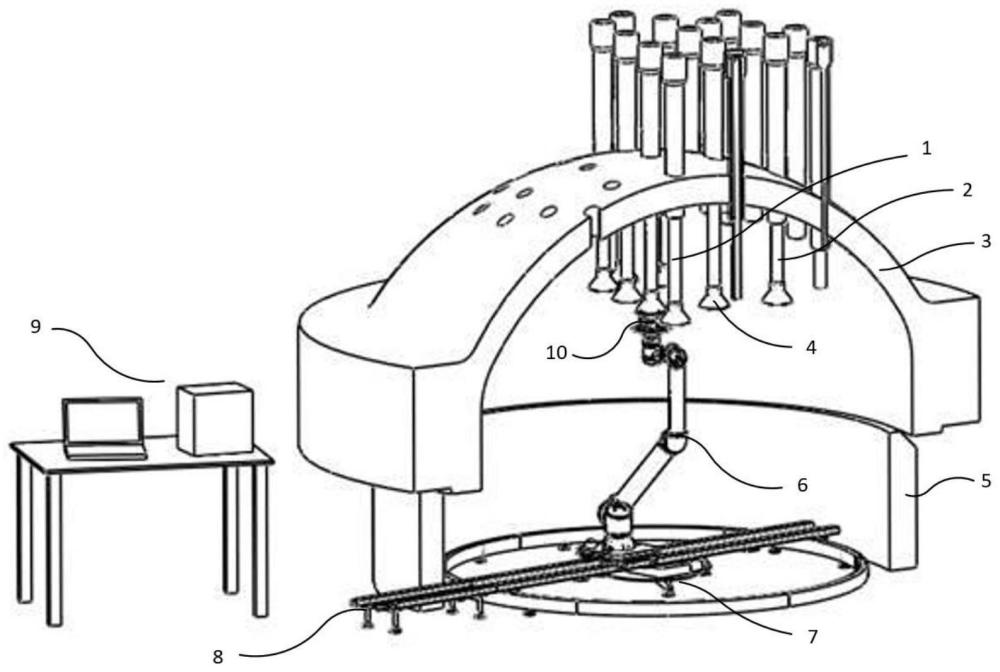
3、一种用于rpv顶盖隔热套筒测量或维修的环轨机器人,包括机械臂和运载装置;所述运载装置包括圆形导轨和设置在所述圆形导轨内部的支撑平台,所述支撑平台上设有第一条形导轨和驱动所述第一条形导轨在所述圆形导轨转动的旋转运动驱动机构,所述第一条形导轨上设有可沿所述第一条形导轨直线运动的运载小车,所述运载小车上设有所述机械臂和定位相机,所述机械臂设有用以测量或者维修的工具头。
4、进一步地,所述圆形导轨为多段拼接结构。
5、进一步地,所述圆形导轨的下方安装有第一调整脚垫。
6、进一步地,所述运载小车的下方设有直线运动驱动机构,所述第一条形导轨具有两条平行的导轨,所述两条平行的导轨之间设有齿条,所述直线运动驱动机构具有与所述齿条配合的齿轮,导轨内侧侧面设有光栅尺。
7、进一步地,所述直线运动驱动机构包括驱动连接的电机和减速机,所述减速机的输出轴上设置所述齿轮。
8、进一步地,所述旋转运动驱动机构包括驱动连接的旋转电机和蜗轮蜗杆减速机,所述蜗轮蜗杆减速机与安装在所述支撑平台底部,并通过法兰盘直接与第一条形导轨通过螺钉固定连接,蜗轮旋转即可驱动所述第一条形导轨的末端沿所述圆形导轨旋转。
9、进一步地,旋转编码器设置在支撑平台上,旋转编码器用于记录直线导轨沿支撑平台中心旋转的角度,以便进行运载小车在所述圆形导轨上的极坐标定位。
10、进一步地,所述环轨机器人还包括外部对接轨道和控制系统,所述外部对接轨道用于在反应堆压力容器顶盖外对接所述第一条形导轨以将所述运载小车从所述外部对接轨道送到所述运载装置中。
11、进一步地,所述外部对接轨道包括第二条形导轨和齿条,所述第二条形导轨可与所述第一条形导轨快速拼装。
12、此外,本发明还提供了一种用于rpv顶盖隔热套筒测量或维修的方法,包括以下步骤:
13、s1:通过顶盖图纸或测绘等手段建立顶盖内隔热套筒分布地图;
14、s2:顶盖落座前,将圆形导轨拼装在屏蔽墙内;
15、s3:将第一条形导轨及运载小车安装在圆形导轨上;
16、s4:放置顶盖,不限制顶盖的落座角度;
17、s5:手动控制运载小车分别运动至顶盖内4个热电偶隔热套筒下方,对热电偶隔热套筒喇叭口进行拍摄,根据对定位相机画面内喇叭口图像的圆度,判定运载小车是否与喇叭口底部平面平行,以此指导局部圆形导轨的调平操作,调平通过调整圆形导轨各调整脚垫进行;
18、s6:重复s5,直至在圆形导轨各个位置处拍摄所有对应的热电偶隔热套筒喇叭口的图像圆度均达标准;
19、s7:手动控制运载小车运动至位于热电偶隔热套筒下方(图5中黑色套筒)下方,此时运载小车上定位相机拍摄中心隔热套筒喇叭口,根据喇叭口在相机画面内的位置,判断喇叭口与定位相机的水平位置关系,当喇叭口在定位相机的位置满足二者处于同一铅锤线上的条件时,记录此时运载小车在运载装置坐标系下的坐标,通过相机位置的标定数据,换算为喇叭口几何中心在运载装置坐标系下的水平面坐标;
20、s8:手动控制运载小车分别运动至另外3个热电偶隔热套筒下方,重复s7步骤,获取3组热电偶隔热套筒喇叭口几何中心在运载装置坐标系下的水平面坐标;
21、s9:通过测绘获取的顶盖内隔热套筒图纸上4个热电偶隔热套筒的位置坐标,通过坐标转换操作,确定运载装置坐标系和顶盖坐标系水平方向上的坐标转换矩阵,完成标定过程;
22、s10:标定完成后,控制第一条形导轨运动至对准门洞位置;
23、s11:连接外部对接轨道,并对外部对接轨道进行调平;
24、s12:控制运载小车在第一条形导轨上运动,经由外部对接轨道到达门洞外;
25、s13:安装机械臂,并根据需要安装测量头或维修工具头;
26、s14:控制运载小车沿第一条形导轨回到门洞内;
27、s15:拆除外部对接轨道,并安装第一条形导轨的机械限位装置;
28、s16:在控制系统直接输入隔热套筒编号,环轨机器人驱动运动部件,自动将测量头或维修工具头移动至隔热套筒的指定位置进行测量/维修作业。
29、与现有技术相比,本发明提供的用于rpv顶盖隔热套筒测量或维修的环轨机器人和方法具有以下有益效果:
30、本发明具备搭载测量头或维修工具头在顶盖内进行全空间高精度定位的移动功能,同时可为作业提供相对于顶盖绝对水平的测量基准和作业末端的顶盖内全局坐标反馈,为测量或维修作业提供精准便利的条件。
31、本发明针对顶盖放置水平度不确定、设备运动地面不平的情况,提出了基于喇叭口拍摄圆度的视觉标定方法和调整手段,可将本设备的基准运动平面校准为与顶盖平面平行,提供顶盖内统一的测量基准和运动基准避免引入测量和控制误差。
32、本发明针对高精度测量场景下测量范围受限的问题,通过将运载小车、关节臂以及测量头/维修工具头末端等执行机构反馈的运动信息进行数据整合,使得测量末端在运载装置坐标系下坐标可实时反馈,测量头在不同隔热套筒处的测量数据可在同一坐标系下进行数据融合和比较,可实现控制棒驱动机构隔热套筒磨损量准确的比较测量。
33、本发明通过基于喇叭口拍摄位置的视觉标定方法,将运载装置的运动坐标系与顶盖坐标系进行空间统一,可提供对测量头/作业工具头在顶盖内的全局坐标精确表示,为高精度测量及维修作业实现高效的引导控制。
34、本发明在保证完成高精度测量和维修任务的同时,不对顶盖放置的角度、水平度和地面平整度特殊要求,具有良好的现场适应性。
35、本发明通过对不同机组顶盖内隔热套筒分布提前制作地图,可实现本设备对不同应用对象的适应性。
36、本发明使用机械臂作为测量和维修工具头的载体,将测量和维修工具头送至指定位置的同时,机械臂末端坐标可量测,在进行同一区域测量和作业时,机械臂底部固定,各个隔热套筒处的测量数据可直接统一至同一坐标系下。
37、本发明提供的机械臂在顶盖内部具备较强的可达性和使用灵活性,可通过门洞进出。
38、本发明采用环轨和条形导轨组合的形式,可为运载小车在顶盖内提供全覆盖的移动范围。
39、进一步地,本发明提供的运载装置的圆形导轨为分段式可调平结构,可方便地进行调平操作。
40、进一步地,本发明提供的极坐标运动方式可很好适应顶盖放置的不确定性,通过简单的标定即可实现设备坐标相对于顶盖坐标的转换。
41、进一步地,本发明在顶盖内部的运动均由导轨进行导向、伺服电机进行驱动,在顶盖内位置的可控性较强、定位精度较高。
42、进一步地,本发明的运载小车、机械臂末端和测量/维修工具头在顶盖内的空间位置和姿态均可定量反馈。
43、进一步地,本发明具备对隔热套筒进行辅助定位功能。
44、进一步地,本发明的模块间可替换性强,安装拆卸维护方便。
45、进一步地,本发明设有可调平的对接导轨,可方便地实现运载小车进出顶盖,进行检修和替换操作。
- 还没有人留言评论。精彩留言会获得点赞!