光伏清洁机器人、光伏清洁机器人的控制方法及电子设备与流程
本发明主要涉及机器人姿态控制,尤其涉及一种光伏清洁机器人、光伏清洁机器人的控制方法及电子设备。
背景技术:
1、光伏清洁机器人是一种用于对光伏组件表面进行清洁作业的机器人。在清洁作业的过程中,光伏清洁机器人可能会出现上下行动轮行进速度不同的现象,如此会使自身发生倾斜,甚至使自身卡死在光伏组件上而无法进行清洁。
2、目前通常利用光伏清洁机器人的底部悬挂的带有测距传感器的摆臂判断光伏清洁机器人的当前姿态以便进行调整。当光伏清洁机器人发生倾斜时,摆臂相对于光伏清洁机器人亦会发生倾斜,此时根据摆臂的倾斜方向以及测距传感器的读数进行当前姿态的调整。然而,由于摆臂在清洁过程中很可能会不规则摆动,会给光伏清洁机器人的姿态判断带来较大干扰,导致对当前姿态的判断存在较大误差,使得当前姿态无法被及时调整,光伏清洁机器人可能会卡死在光伏组件上而无法进行清洁。
技术实现思路
1、本发明的目的之一在于减少对当前姿态的判断误差,以便光伏清洁机器人的当前姿态能够被及时调整,避免光伏清洁机器人会卡死在光伏组件上而无法进行清洁。
2、本发明的目的之二在于提供的光伏清洁机器人能够应用于各种结构和摆布方式的光伏组件,具有较强的适应能力,并且受外部恶劣环境的影响较小,具有较强的鲁棒性。
3、本发明的目的之三在于避免运行过程中产生的累积误差,使得姿态控制更加稳定。
4、基于上述目的,在本发明的第一方面,提供了一种光伏清洁机器人,所述光伏清洁机器人包括电性相连的控制器、驱动电机、第一驱动轮、第二驱动轮以及受力时能够产生电压信号的多个应力传感器,当各应力传感器产生电压信号时,所述控制器用于执行如下步骤:
5、通过所述各应力传感器产生的电压信号获取所述光伏清洁机器人的当前受力情况;
6、根据所述当前受力情况确定所述光伏清洁机器人的当前姿态;
7、从预设策略集中,选取与所述当前姿态对应的目标控制策略,并依据所述目标控制策略控制所述驱动电机以调整所述当前姿态。
8、在一种可选的实施方式中,所述控制器容置于所述光伏清洁机器人的主板;所述光伏清洁机器人具有设置在所述主板两侧的多个转轮结构,其中每一转轮结构上连接有相应的一个应力传感器。
9、在一种可选的实施方式中,每个应力传感器包括连接于相应一个转轮结构与所述主板之间的金属弹性体,以及与所述金属弹性体配合的应变片。
10、在一种可选的实施方式中,所述控制器具体用于:
11、控制所述驱动电机驱动所述第一驱动轮和所述第二驱动轮保持当前转速;或者,
12、控制所述驱动电机依据所述目标控制策略驱动所述第一驱动轮和/或所述第二驱动轮调整当前转速,以使得所述光伏清洁机器人在所述第一驱动轮和/或所述第二驱动轮的转动作用下调整所述当前姿态;或者,
13、控制所述驱动电机停止驱动所述第一驱动轮或所述第二驱动轮转动,或者,控制所述驱动电机驱动所述第一驱动轮或所述第二驱动轮以当前驱动方向的反向进行转动。
14、在一种可选的实施方式中,在控制所述驱动电机依据所述目标控制策略驱动所述第一驱动轮和/或所述第二驱动轮调整当前转速的过程中,所述控制器具体用于:
15、根据当前总受力确定所述光伏清洁机器人的偏移方向;
16、记录所述光伏清洁机器人自产生相对偏移起的累积受力,并根据所述累积受力及所述第一受力阈值计算针对所述当前姿态的应力积分参数;
17、根据所述应力积分参数、所述当前总受力以及预设的系统参数,获得相应的姿态控制值,并根据所述姿态控制值及所述偏移方向生成针对所述驱动电机的控制信号;
18、采用所述控制信号控制所述驱动电机驱动所述第一驱动轮和/或所述第二驱动轮调整当前转速。
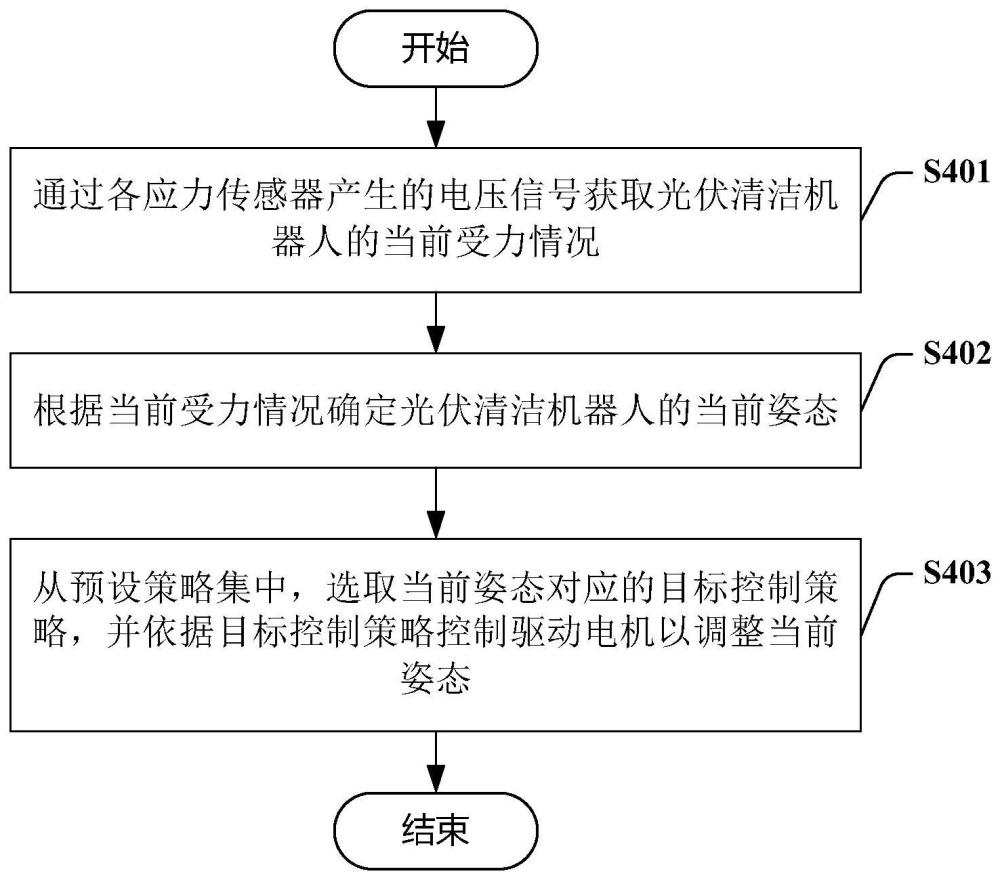
19、在本发明的第二方面,提供一种光伏清洁机器人的控制方法,所述光伏清洁机器人包括电性相连的驱动电机、第一驱动轮、第二驱动轮以及受力时能够产生电压信号的各应力传感器,当所述各应力传感器产生电压信号时,所述方法包括:
20、通过所述各应力传感器产生的电压信号获取所述光伏清洁机器人的当前受力情况;
21、根据所述当前受力情况确定所述光伏清洁机器人的当前姿态;
22、从预设策略集中,选取与所述当前姿态对应的目标控制策略,并依据所述目标控制策略控制所述驱动电机以调整所述当前姿态。
23、在一种可选的实施方式中,所述根据所述当前受力情况确定所述光伏清洁机器人的当前姿态,包括:
24、根据当前总受力确定所述光伏清洁机器人的相对偏移状态;其中:
25、若所述当前总受力小于预设的第一受力阈值,确定所述光伏清洁机器人未产生相对偏移;
26、若所述当前总受力不小于所述第一受力阈值且不大于预设第二受力阈值,确定所述光伏清洁机器人产生相对偏移;
27、若所述当前总受力大于所述第二受力阈值,确定所述光伏清洁机器人产生严重偏移。
28、在一种可选的实施方式中,所述预设策略集包括:
29、对应未产生相对偏移的第一策略,所述第一策略包括控制所述驱动电机驱动所述第一驱动轮和所述第二驱动轮保持当前转速;
30、对应产生相对偏移的第二策略,所述第二策略包括控制所述驱动电机依据所述目标控制策略驱动所述第一驱动轮和/或所述第二驱动轮调整当前转速,以使得所述光伏清洁机器人在所述第一驱动轮和/或所述第二驱动轮的转动作用下调整所述当前姿态;
31、对应产生严重偏移的第三策略,所述第三策略包括控制所述驱动电机停止驱动所述第一驱动轮或所述第二驱动轮转动,或者,控制所述驱动电机驱动所述第一驱动轮或所述第二驱动轮以当前驱动方向的反向进行转动。
32、在一种可选的实施方式中,当所述目标控制策略为所述第二策略时,所述依据所述目标控制策略控制所述驱动电机以调整所述当前姿态,包括:
33、根据当前总受力确定所述光伏清洁机器人的偏移方向;
34、记录所述光伏清洁机器人自产生相对偏移起的累积受力,并根据所述累积受力及所述第一受力阈值计算针对所述当前姿态的应力积分参数;
35、根据所述应力积分参数、所述当前总受力以及预设的系统参数,获得相应的姿态控制值,并根据所述姿态控制值及所述偏移方向生成针对所述驱动电机的控制信号;
36、采用所述控制信号控制所述驱动电机驱动所述第一驱动轮和/或所述第二驱动轮调整当前转速。
37、在本发明的第三方面,提供一种电子设备,包括处理器以及存储器;所述存储器中存储有计算机程序指令,所述计算机程序指令被所述处理器调用时,能够实现上述第二方面任一所述的光伏清洁机器人的控制方法。
38、与现有技术相比,本发明具有以下优点:
39、第一方面,本发明提供的光伏清洁机器人、光伏清洁机器人的控制方法及电子设备,通过当前受力情况确定光伏清洁机器人的当前姿态,从而能够减少对当前姿态的判断误差,便于对当前姿态做出及时调整。
40、第二方面,本发明提供的光伏清洁机器人、光伏清洁机器人的控制方法及电子设备,通过部件中不存在不规则摆动的摆臂,减少对机器人姿态判断的干扰,从而能够应用在各种结构和摆布方式的光伏组件环境,具有较强的环境适应能力,并且受外部环境的影响较小,具有较强的鲁棒性。
41、本发明提供的光伏清洁机器人、光伏清洁机器人的控制方法及电子设备,通过应力积分参数对光伏清洁机器人的当前姿态进行调整,从而避免了运行过程中产生的累积误差,使得姿态控制更加稳定。
- 还没有人留言评论。精彩留言会获得点赞!