一种微型柔性机械臂关节及机械臂的制作方法
本发明属于机械臂关节,具体地说是一种微型柔性机械臂关节及机械臂。
背景技术:
1、现阶段各种类型、结构形式的机械臂在工业、医疗、特种装备、航天等领域有着非常广泛的应用,技术也相对比较成熟。
2、目前所常见的协同作业机械臂、scara机械臂等已经在本体结构设计、电气集成、板卡设计方面取得了很大的进步与改进。但其单关节一般仅具有一个自由度,也造成了其作业空间有很大的局限性。目前国内外在多自由度、柔性机械臂方面进行了大量科研设计工作,如蛇形机械臂、攀爬机械臂、仿人关节等等。
3、国内外在柔性机械臂的设计研发方面的技术路线主要有线驱柔性臂与电驱柔性臂。
4、对于电驱柔性臂,其驱动方式是通过电机驱动齿轮建立起柔性臂的驱动系统(舵机)。柔性臂的每个关节通过舵机驱动实现关节的俯仰与偏航功能。同样,此种电驱柔性臂其单个关节仅具有单一的自由度,需要多关节配合方能实现复杂的运动形式。对于线驱柔性臂,其驱动方式是通过不同形式的电机带动驱动线(钢丝绳等)建立起柔性臂的驱动系统。对于线驱柔性臂而言,其单个关节也并不具备独立动作的能力。这种线驱形式的柔性机械臂驱动系统通常集中布置在柔性臂主基座一端,其每个关节的动作均需要通过柔性臂主基座的驱动端所引出的至少三根独立的驱动线实现关节的俯仰与偏航功能。随着关节数量的增加造成柔性臂主基座的驱动端所连接的驱动线数量过多,柔性臂主基座的体积会变得过大,使其应用环境受限。
5、因此,设计一种具有多自由度、结构紧凑微小的柔性机械臂关节有着重要的现实意义。
技术实现思路
1、针对上述问题,本发明的目的在于提供一种微型柔性机械臂关节及机械臂。
2、本发明的目的是通过以下技术方案来实现的:
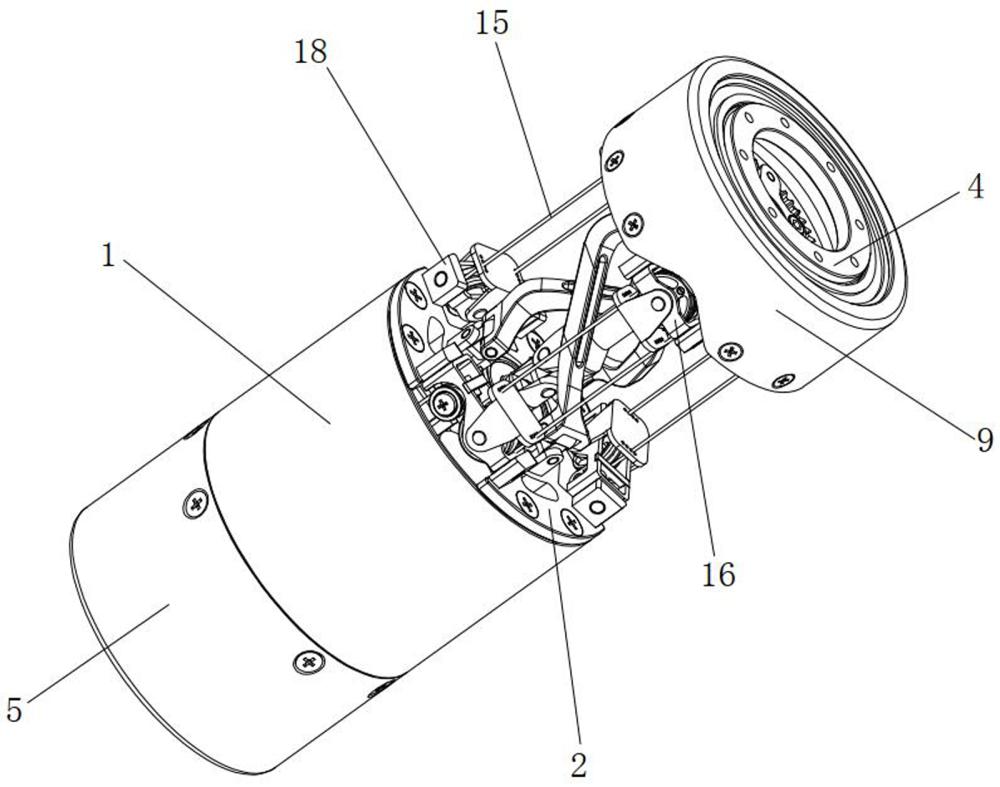
3、一种微型柔性机械臂关节,包括基座外壳、下架体、上架体、铰接连杆组件、回转连接座、回转驱动组件、底壳、驱动板卡组件及绳驱组件;
4、所述基座外壳的顶端开口,所述基座外壳的顶端开口的内侧安装有所述下架体,所述下架体通过所述铰接连杆组件与所述上架体连接;
5、所述回转驱动组件包括回转驱动件及回转传动结构,所述回转驱动件安装于下架体上、并位于所述基座外壳的内部,所述回转传动结构安装于所述上架体上,所述回转传动结构的动力输入端与所述回转驱动件的驱动端连接,所述回转传动结构的动力输出端与所述回转连接座固定连接;
6、所述基座外壳、下架体及上架体构成的整体上均匀设置至少三组所述绳驱组件,每组所述绳驱组件均位于所述回转驱动件的外周,每组所述绳驱组件均包括牵引绳驱动件及牵引绳驱动结构,每组所述绳驱组件的牵引绳驱动结构均分别与所述基座外壳的底部、所述下架体及所述上架体连接,每组所述绳驱组件的牵引绳驱动件均安装于所述基座外壳的内部,每组所述绳驱组件的牵引绳驱动件分别与同组绳驱组件的牵引绳驱动结构的动力输入端连接;
7、所述底壳与所述基座外壳的底部连接、并罩设于所述基座外壳的底面的外侧,所述驱动板卡组件安装于所述底壳的内部,所述驱动板卡组件分别与所述回转驱动件及各所述牵引绳驱动件连接、并控制所述回转驱动件及各所述牵引绳驱动件动作。
8、所述回转传动结构的动力输入端通过万向传动轴与所述回转驱动件的驱动端连接。
9、所述上架体的外周面上连接有顶壳,所述回转传动结构包括外齿圈、太阳轮、安装有若干个行星轮的行星轮架,所述太阳轮作为回转传动结构的动力输入端,所述外齿圈作为回转传动结构的动力输出端;
10、所述回转连接座转动安装于所述顶壳的内侧、并与所述外齿圈同轴连接,所述回转连接座位于所述外齿圈的远离所述基座外壳的一侧,所述太阳轮与所述万向传动轴的远离所述回转驱动件的驱动端的一端固定连接,所述行星轮架与所述上架体固定连接,所述行星轮架的轴向中心线、太阳轮的轴向中心线、外齿圈的轴向中心线均共线,各所述行星轮均分别与所述太阳轮及外齿圈相啮合。
11、本发明的微型柔性机械臂关节还包括一个柔性护套,所述柔性护套将所述顶壳的外周面、所述基座外壳的外周面以及位于所述下架体与上架体之间的结构均罩住。
12、每组所述绳驱组件的牵引绳驱动结构均包括牵引绳、上轮架、上绳轮、下轮架、下绳轮、改向惰轮a、改向惰轮b及驱动绳轮;
13、每组所述绳驱组件的牵引绳驱动结构的上轮架均安装于所述上架体上,每组所述绳驱组件的牵引绳驱动结构的上绳轮均设置于同组绳驱组件的牵引绳驱动结构的上轮架上,每组所述绳驱组件的牵引绳驱动结构的下轮架均安装于所述下架体上,每组所述绳驱组件的牵引绳驱动结构的下绳轮及改向惰轮a分别设置于同组绳驱组件的牵引绳驱动结构的下轮架上,每组所述绳驱组件的牵引绳驱动结构的改向惰轮b均设置于所述基座外壳的底面上,每组所述绳驱组件的牵引绳驱动结构的驱动绳轮分别设置于同组绳驱组件的牵引绳驱动件的驱动端上;
14、每组所述绳驱组件的牵引绳驱动结构的牵引绳的一端固接于同组绳驱组件的牵引绳驱动结构的上绳轮上,每组所述绳驱组件的牵引绳驱动结构的牵引绳的另一端在同组绳驱组件的牵引绳驱动结构的上绳轮及下绳轮上交替绕过若干圈后、再依次绕过同组绳驱组件的牵引绳驱动结构的改向惰轮a及改向惰轮b、之后在同组绳驱组件的牵引绳驱动结构的驱动绳轮绕过若干圈并固接于该驱动绳轮上。
15、每组所述绳驱组件的牵引绳驱动结构的改向惰轮a的轮轴各转动安装于对应的一个铰接转接件a上,每个所述铰接转接件a分别通过一个铰接转轴a与邻近的一组所述绳驱组件的牵引绳驱动结构的下轮架铰接,每个所述铰接转轴a的轴向中心线均平行于该铰接转轴a所连接的下轮架的长度方向,每组所述绳驱组件的牵引绳驱动结构的下绳轮的轴向中心线均垂直于同组绳驱组件的牵引绳驱动结构的下轮架的长度方向,每组所述绳驱组件的牵引绳驱动结构的改向惰轮a的轮轴的轴向中心线也均垂直于同组绳驱组件的牵引绳驱动结构的下轮架的长度方向。
16、所述铰接连杆组件包括至少三组沿圆周方向均匀设置于所述下架体与上架体之间的铰接连杆结构,每组所述铰接连杆结构均包括铰接连杆、铰接转接件b及铰接转接件c;
17、每组所述铰接连杆结构的铰接转接件b的一端分别与所述下架体通过一个铰接转轴b铰接、另一端与同组铰接连杆结构的铰接连杆的下端通过一个铰接转轴c铰接,每组所述铰接连杆结构的铰接转接件c分别与所述上架体通过一个铰接转轴d铰接、另一端与同组铰接连杆结构的铰接连杆的上端通过一个铰接转轴e铰接;
18、初始使用状态时,所述下架体所在平面及上架体所在平面相互平行,同一个所述铰接转接件b所连接的铰接转轴b的轴向中心线在所述下架体所在平面的投影与所连接的铰接转轴c的轴向中心线在所述下架体所在平面的投影相互垂直,同一个所述铰接转接件c所连接的铰接转轴d的轴向中心线在所述下架体所在平面的投影与所连接的铰接转轴e的轴向中心线在所述下架体所在平面的投影相互垂直,每相邻的两组所述铰接连杆结构的铰接连杆在所述下架体所在平面的投影均形成相同大小的夹角。
19、所述驱动板卡组件包括驱动板卡安装架体、回转驱动件驱动板卡及牵引绳驱动件驱动板卡,所述回转驱动件驱动板卡与所述回转驱动件连接,所述牵引绳驱动件驱动板卡的设置数量与所述绳驱组件的设置数量相对应,每个所述牵引绳驱动件驱动板卡分别与对应的一个所述牵引绳驱动件连接;
20、所述驱动板卡安装架体安装于所述底壳的内部,所述回转驱动件驱动板卡及各牵引绳驱动件驱动板卡分别安装于所述驱动板卡安装架体上。
21、所述驱动板卡安装架体分为连接在一起的驱动板卡安装基板及若干个驱动板卡安装框,所述驱动板卡安装基板通过螺钉固定安装于所述底壳的内部,所述回转驱动件驱动板卡安装于所述驱动板卡安装基板的远离基座外壳的一侧面上,所述驱动板卡安装框的设置数量与所述牵引绳驱动件驱动板卡的设置数量相对应,每个所述驱动板卡安装框上各安装有一个对应的牵引绳驱动件驱动板卡,各所述驱动板卡安装框的远离驱动板卡安装基板的一端分别穿过所述基座外壳的底面、并延伸至所述基座外壳的内部。
22、一种机械臂,包括多个一一串联连接的如前述的微型柔性机械臂关节,最初端的所述微型柔性机械臂关节的底壳的底面与上级结构连接;最末端的所述微型柔性机械臂关节的回转连接座与执行单元连接;每相邻的两个所述微型柔性机械臂关节之间,前一个所述微型柔性机械臂关节的回转连接座与后一个所述微型柔性机械臂关节的底壳的底面固定连接。
23、本发明的优点与积极效果为:
24、1.本发明的微型柔性机械臂关节具有旋转、俯仰与偏航自由度,所形成的机械臂能够实现更灵活的空间作业。
25、2.本发明的微型柔性机械臂关节的俯仰、偏航与回转功能的实现均集成在关节内部,使其较为紧凑小巧。
26、3.本发明的微型柔性机械臂关节的俯仰与偏航功能通过设计在关节内的牵引绳驱动件直接带动牵引绳实现;同传统线驱柔性臂关节相比,可极大减小所对应的柔性臂主基座的体积;而同电驱柔性臂关节相比,每个关节内部既没有复杂的舵机传动系统,同时每个关节自由度数量远大于电驱柔性臂关节。
27、4.本发明的微型柔性机械臂关节通过设计并集成在关节内的回转驱动组件,能够实现关节直接带动下一个关节或执行单元单独旋转,配合关节上的俯仰与偏航功能,使得该柔性臂关节具有出色的复杂空间灵活作业能力。
28、5.本发明的微型柔性机械臂关节的内部通过设置铰接连杆组件,一方面使得关节刚度提升,另一方面在铰接连杆组件外侧形成了走线空间,使得该柔性臂关节在具有良好的动态响应的条件下,整体外观更为简洁美观。
29、6.本发明的微型柔性机械臂关节中的驱动板卡组件集成在关节内部,一方面使得关节结构更为紧凑,另一方面便于关节的安装调试与维护。
- 还没有人留言评论。精彩留言会获得点赞!