一种面向灵巧机械手抓取操作的轨迹优化方法
本发明涉及机器人领域,具体涉及一种面向灵巧机械手抓取操作的轨迹优化方法。
背景技术:
1、抓取运动规划是一项重要的机器人技术任务,是机器人在现实环境中高效、安全地运动和交互所必需的。其目标是在配置空间中生成可行的机器人轨迹,并根据给定的标准以最佳方式达到目标。轨迹的可行性通常是指避免碰撞和保证约束,如机器人关节限制,而最优性通常是指轨迹平滑度、加速度最小化、执行路径长度或类似的定性指标。机械手的关节和操作环境的复杂性都在快速增长,这就更加需要高效的高维运动规划方法。例如,在非结构化环境中工作的移动机械手需要对不同的环境对象进行交互。这种高自由度系统需要可靠的抓取运动规划来执行指定任务,同时满足各种约束条件,并在环境中无碰撞地移动。同时计算效率也尤为重要,因为在不断变化的动态环境中可能需要重新规划轨迹。目前高维空间运动规划最常见的两种方法包括基于采样的方法和轨迹优化方法。
2、基于采样的规划涉及反复从空间中采样配置,以找到最优路径。对于高自由度的机械手来说其搜索空间过大,这可能会导致非常高的计算成本。然而,基于优化的方法通过最小化设定好的目标函数,找到通往目标的无碰撞路径。基于优化的方法相对于基于采样的方法来说更加高效。以往的轨迹优化方法在使用两指或三指机械手的抓取运动规划任务中展现出了它们的有效性。然而,当应用于高自由度的灵巧手(五指)时,交互姿势的复杂性显著增加。这些方法在优化高维度轨迹搜索空间方面遇到了困难,通常会陷入局部最小值。除了高自由度之外,灵巧手运动的规划还涉及手指之间的协调。无论是基于采样的方法还是基于优化的方法,都面临着产生自然手部姿势序列的挑战,以避免不自然的交互。
技术实现思路
1、针对上述现有技术的不足,本发明提供一种面向灵巧手抓取操作的轨迹优化方法,目标是针对高自由度灵巧手在高维空间汇总运动规划困难,难以实现高效且合理的抓取轨迹问题,提出一种新颖的时间参数化优化方法,结合手部先验信息,用于灵巧手的抓取运动规划以解决这些挑战。
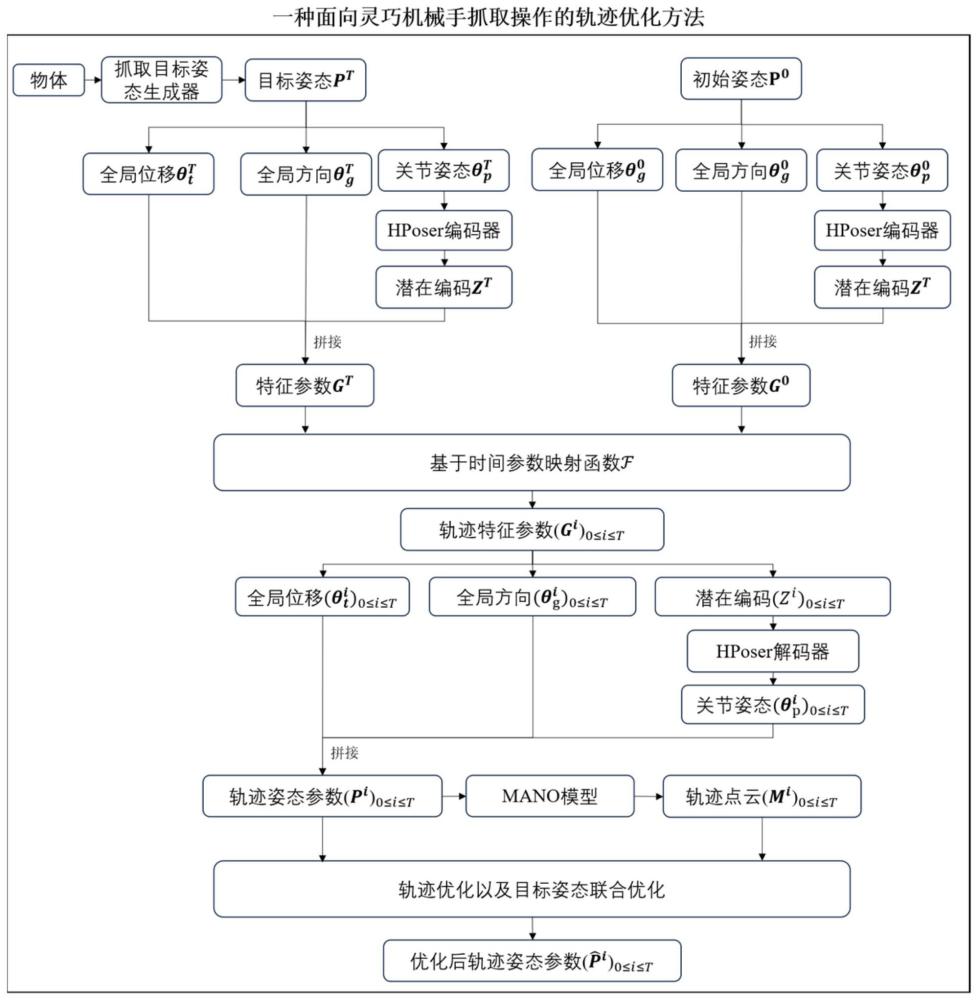
2、本发明的目的是通过以下技术方案实现的:一种面向灵巧机械手抓取操作的轨迹优化方法,包括以下步骤:
3、s1、获取抓取目标物体的符号距离场参数,并生成若干抓取目标姿态,所述抓取目标姿态包括全局位移、全局方向和关节姿态;
4、s2、随机初始化起始姿态的全局位移参数、全局方向参数和关节姿态参数;
5、s3、构建基于多层感知器结构的hposer编码器-解码器网络;使用hposer编码器将目标姿态和初始姿态的关节姿态参数分别映射到各自的潜在编码特征中;
6、s4、将目标姿态和初始姿态两者中编码特征向量、全局位移和方向参数合并,输入到基于时间参数优化的映射函数中,输出轨迹特征参数;
7、s5、将轨迹特征参数中的编码特征输入到hposer解码器中,获得重建后的关节姿态参数并和轨迹特征参数中的全局位移和方向参数合并得到最终的轨迹姿态参数;
8、s6、通过mano模型得到轨迹每一帧的点云,通过轨迹姿态参数和点云进行轨迹优化和目标姿态联合优化,通过迭代进行的梯度更新,得到优化后的映射函数和目标特征参数;根据优化后的映射函数和目标特征参数计算轨迹姿态,得到优化后的轨迹姿态参数。
9、进一步地,所述s1中生成若干抓取目标姿态具体为:使用条件自编码生成器来根据不同物体的输入生成一个或多个粗糙的抓取姿态。
10、进一步地,所述s2中随机初始化起始姿态的全局位移参数、全局方向参数和关节姿态参数具体为:选定一个生成的抓取目标姿态,根据物体中心到抓取姿态手掌中心的连线方向,随机初始化起始姿态的全局位移参数以及全局方向参数初始位置选取在物体中心外10cm;其关节姿态参数默认设置为0。
11、进一步地,所述基于多层感知器结构的hposer编码器-解码器网络具体包括编码器结构和解码器结构:编码器eθ和解码器dθ都是基于多层感知器构建的,其中编码器由4个全连接层构建,解码器由3个全连接层构建;此外网络中每个隐藏层的输出都会经过leakrelu激活函数以确保神经网络非线性且稀疏;输出层在经过leakrelu激活函数之前会以10%的概率对其执行dropout操作以减轻过拟合。
12、进一步地,所述基于时间参数优化的映射函数具体为:
13、
14、其中α,λ是函数中的待优化变量,xi=i/t代表标准化下的第i帧的时间索引;s(·)表示sigmoid函数操作;σ是一个超参数,控制着关节移动速率的变化幅度,设置区间为[3,15]。
15、进一步地,所述映射函数中输入为三组独立的优化参数变量,分别为(αt∈r3,λt∈r3)、(αg∈r3,λg∈r3)以及来分别调整手部姿态全局位移θt,全局方向θg以及特征向量z的变化速率,其中dimz代表z的维度大小;具体地,第i帧关于θt,θg以及z的表达式为:
16、
17、
18、
19、其中δz=zt-z0。
20、进一步地,所述轨迹优化和目标姿态联合优化具体为:首先对轨迹优化的对函数中α和λ进行更新,然后再对目标姿态参数进行更新。
21、进一步地,所述轨迹优化的代价损失函数ctraj由三部分组成,其中包括计算手-物穿透大小的损失函数cptr,计算手掌方向偏移量的损失函数cdir以及正则化项creg;具体地,
22、
23、
24、creg=max(s(α)+s(λ),1),
25、
26、其中sdf(v)表示对点v在物体符号距离场中的值;表示每一帧手部姿态的点云表达;表示第i帧中手掌方向单位向量。其中nt表示目标姿态的手掌方向;表示获取手掌顶点的法向量;∈默认设置为γ0以及γ1为权重常量。
27、进一步地,目标姿态优化的损失函数cgrasp具体表达式为:
28、
29、
30、
31、其中cptr是基于目标姿态与物体之间的穿透大小的损失函数;catt是基于手指指尖与物体之间最小距离的损失函数,其作用在于尽量让目标姿态中的指尖与物体相接触;表大拇指,食指以及中指指尖的点云索引;abs(·)表示取绝对值操作;ch是正则项,用于约束目标姿态参数的优化;其中pt和和分别代表目标姿态优化前和优化后的的参数;ω0,ω1和ω2为权重常量。
32、本发明的有益效果是:
33、1、提出了一种针对灵巧机械手抓取轨迹优化的方法。
34、2、提出了一种基于时间参数的轨迹优化方法,将基于高自由的灵巧手的抓取轨迹优化问题通过一种基于时间参数的映射函数来对灵巧手部姿态参数进行合理的降维操作,大大减少了优化过程中的搜索空间,降低了优化难度,同时一定程度上避免的陷入局部最小值。
35、3、在优化中引入了预训练好的网络模型,能够提供手指之间协调性的先验信息,保证在整个轨迹优化过程中不会出现不合理的手势姿态。
36、4、提出了一种目标联合优化策略,在轨迹优化的过程中也不断的去调整最终的抓取姿态从而得到更合理的抓取轨迹以及更可靠的抓取姿态。
37、5、本发明可以对任意形式的高自由度机械手的姿态参数进行合理降维,并提取不同关节协同运动的先验知识,在减少搜索空间的大小的同时,也能够保证抓取动作真实性和平滑性。本发明也可兼容较低自度的机械手,如二抓,三抓。
- 还没有人留言评论。精彩留言会获得点赞!