面向飞机舱门装配的位姿调整系统及方法
本发明涉及自动化装配领域,尤其涉及面向飞机舱门装配的位姿调整系统及方法。
背景技术:
1、随着制造业智能化的快速发展,飞机舱门的装配逐步由人工装配向自动化升级,应用机器视觉技术并通过非接触测量手段,获取目标特征和丰富的环境数据,能够实时地对目标或环境的变化做出响应,通过机器视觉技术与机器人的集成,能够提高机器人对环境的感知和应变能力;
2、目前国产飞机舱门装配仍采用手工装配为主的作业模式,存在装配精度难以保证、质量一致性差、耗时长的问题,由于飞机舱门重量大,且需要舱门与机架之间达到高自由度与高精度的配合要求,而现有的位姿测量方法和测量手段难以满足装配过程中机器人的位姿调整,在应用机器人进行自动化装配飞机舱门时,机械臂末端夹具难以准确抓取舱门,以及通过视觉引导机器人位姿调整,并将舱门精准装配至飞机的机架上,存在飞机舱门的装配协调准确度低的缺陷;
3、针对上述的技术缺陷,现提出一种解决方案。
技术实现思路
1、本发明的目的在于:解决应用机器人进行自动化装配飞机舱门时,机械臂末端夹具难以准确抓取舱门,以及通过视觉引导机器人位姿调整,并将舱门精准装配至飞机的机架上的问题,以及解决飞机舱门的装配协调准确度低的缺陷,从而提高飞机舱门的装配协调准确度,有效提高舱门装配的高效性、便捷性及安全性。
2、为了实现上述目的,本发明采用了如下技术方案:
3、面向飞机舱门装配的位姿调整方法,包括以下步骤:
4、步骤一,图像采集模块用于采集飞机舱门图像并发送到核心处理模块;
5、步骤二,核心处理模块用于获取并分析飞机舱门图像:先对飞机舱门图像进行预处理,并结合三维卷积神经网络算法,规划生成最佳抓取运动路径;再通过基于点云场景分割与改进配准算法进行深度分析,生成并发送机械臂姿态调整信号到调控装配模块;
6、步骤三,调控装配模块用于对飞机舱门进行精准抓取和最佳装配。
7、进一步的,采集飞机舱门图像并进行预处理的具体过程为:
8、飞机舱门图像包括舱门导轨图像a和舱门边框图像b;
9、先通过对舱门导轨图像a进行三维重构,识别出舱门导轨的法向量,并计算相对于机器人基坐标系下的偏移姿态;
10、再通过对舱门边框图像b进行处理计算,获取机械臂抓取舱门的位姿,并根据三维卷积神经网络算法规划生成最佳的抓取运动路径。
11、进一步的,基于点云场景分割与改进配准算法进行深度分析的具体过程为:
12、s1:机器人触发工业3d相机采集机架舱门边框和导轨的点云数据,划分并标记目标区域,使用直通滤波器对目标区域点云的进行提取,获取直通滤波后的场景点云q;
13、s2:使用统计滤波器剔除掉目标区域点云中的噪声点:通过对目标区域的场景点云q中每个点进行邻域分析,获取场景滤波后的区域点云c;
14、s3:利用基于ransac聚类与欧式聚类相结合的分割算法,从区域点云c中提取机架舱门的边框点云;
15、s4:通过基于法线夹角与邻域数约束算法在原始点云中提取舱门边框的关键点;
16、s5:采用快速点特征直方图在物体与模板之间寻找相似特征几何描述,从而进行物体与模板之间的初级配准和初始位姿测算;
17、s6:采用改进icp配准算法对舱门装配位姿进行精确测算。
18、进一步的,提取目标区域点云并进行邻域分析的具体过程为:
19、s2-1:设置目标区域的提取阈值,提取目标区域点云,获取直通滤波后的场景点云q;
20、s2-2:预设并标记场景点云q中第i个点的坐标为qi(xi,yi,zi),预设第j(1<<j<<k)个近邻点的坐标为qj(xj,yj,zj),则该点qi到其第j个近邻点qj之间的距离dij;
21、s2-3:通过场景点云q中所有点到其各自k个邻域点的距离构成高斯分布这一规律,计算所有点与其邻域距离的均值μ与标准差σ;
22、s2-4:设置标准差倍数λ,得到置信度区间(μ-λ·σ,μ+λ·σ);
23、s2-5:对场景点云q中所有点到其k邻域距离与置信度区间进行阈值对比,若超出置信度区间则判定为噪声点并去除,进而获取场景滤波后的区域点云c。
24、进一步的,基于法线夹角与邻域数约束算法进行关键点提取过程如下:
25、s4-1:计算物体点云法线:法线计算采用主成分分析法,先构建kdtree搜索结构,预设对原始点云中任意一点p搜索其k个最近邻点,并构造协方差矩阵s,将协方差矩阵s进行奇异值分解,获取最小特征值对应的特征向量,并将其标记为p点法线;
26、s4-2:统计邻域夹角与邻域点个数:对原始点云中任意一点pi,预设半径r,统计点p在半径r的范围内邻域点的个数n,以及点p与其邻域点法线夹角之和θs;
27、s4-3:设置阈值筛选关键点:预设夹角阈值τθ1与邻域数阈值τn,邻域数阈值τn为原始点云中所有点在半径r范围内邻域数的均值的k倍,其中,k为预设倍数;
28、当点p与其邻域点法线夹角之和θs小于夹角阈值τθ1,且点p在半径r的范围内邻域点的个数n小于邻域数阈值τn时,则判定点p为关键点。
29、进一步的,采用快速点特征直方图进行初级配准和初始位姿测算的具体过程为:
30、快速点特征直方图fpfh是通过借助点云点ps~pt对之间的法线关系来计算3个角度变量,得到简化的特征直方图spfh,再对任意一点p及其邻域点pi计算spfh,并进行加权计算便可得到该点的fpfh特征。
31、进一步的,利用fpfh特征配准的初始位姿测算的具体过程如下:
32、s5-1:计算分割的物体点云与模板点云在关键点处的fpfh特征,在模板点云关键点中搜索与目标物体相似的关键点,形成对应点对;
33、s5-2:随机选取n组对应点对,设置对应点对的距离阈值τd1,则任一组对应点对之间的距离应大于阈值τd1;
34、s5-3:通过n组对应点对计算两片点云的刚体变换矩阵,将矩阵应用于物体点云并计算剩余对应点对之间的距离误差,设置距离误差的阈值τd2并进行阈值对比:若距离误差小于阈值τd2,则将该点判定为样本内点,进而统计样本内点的数量;
35、s5-4:重复上述步骤直到最大迭代次数,将样本内点数最多的刚体变换矩阵标记为初始位姿测算结果trough,并将该结果应用于目标物体点云。
36、进一步的,改进的icp算法是由传统ipc算法作出优化生成的,具体优化过程如下:
37、传统的icp算法是采用源点云中的点与目标点云对应点之间的距离来构造目标函数,而改进的icp算法则是采用源点云中的点到目标点云对应点所在切平面的距离来构造目标函数e(t),改进的icp算法通过法线夹角约束,将法线一致性标准引入到对应点测算过程当中,用于过滤错误的对应点对。
38、进一步的,基于改进icp配准的精确位姿测算流程如下:
39、s6-1:初始对应点对测算:
40、将初始位姿变换后的物体点云标记为源点云,将制作的模板点云标记为目标点云;在源点云与目标点云中构造对应点对,并形成对应点对集合m、n;
41、s6-2:引入法线夹角约束用于筛选更新对应点集合:
42、设置法线夹角阈值τθ2,在对应点集合中,若任一个对应点对形成的法线夹角小于阈值τθ2,则保留该对应点对,反之则进行剔除,从而更新对应点集合m、n;
43、s6-3:采用更新的对应点集合m、n,计算变换矩阵δt:
44、s6-3-1:首先通过源点云对应点集合m与目标点云对应点集合n,构造协方差矩阵tcov,并进行奇异值分解;
45、s6-3-2:进而通过奇异值分解的结果,计算得到第一次迭代的位姿变换矩阵δt1;
46、s6-4:利用位姿矩阵δt1更新源点云,并计算源点云与目标点云对应点之间的距离误差e(δt1);
47、s6-5:重复步骤c3和c4进行迭代运算:将迭代次数标记为f,预设迭代次数最大值f以及距离误差阈值e,再进行阈值对比,生成迭代终止信号并停止迭代运算,进而获取物体位姿精确结果tacc;
48、s6-6:通过物体位姿精确结果tacc生成机械臂姿态调整信号。
49、面向飞机舱门装配的位姿调整系统,包括图像采集模块、核心处理模块和调控装配模块,图像采集模块、核心处理模块和调控装配模块之间信号连接。
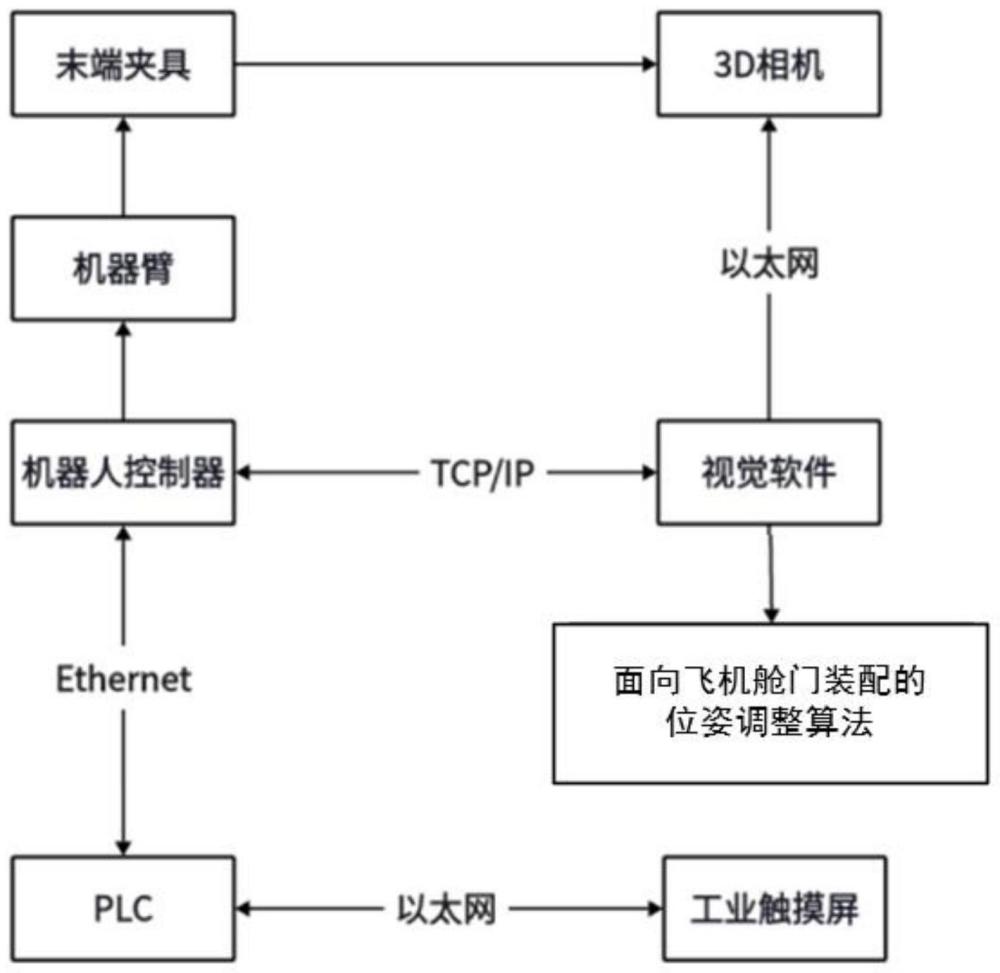
50、面向飞机舱门装配的位姿调整装置,包括plc,所述plc通信连接有工业触摸屏和机器人控制器,所述机器人控制器通信连接有机械臂和视觉软件,所述机械臂包括末端夹具,所述视觉软件包括面向飞机舱门装配的位姿调整算法,且视觉软件通信连接有3d相机,所述3d相机固定安装在机械臂上。
51、综上所述,由于采用了上述技术方案,本发明的有益效果是:
52、1、本发明通过图像采集模块用于采集飞机舱门图像并通过核心处理模块进行分析,获取最佳抓取运动路径并生成机械臂姿态调整信号,其中,通过基于点云场景分割与改进配准算法调整机械臂姿态,从而对飞机舱门进行精准抓取和最佳装配,提高飞机舱门的装配协调准确度,有效提高舱门装配的高效性、便捷性及安全性;
53、2、本发明通过结合法线夹角约束与半径领域点数约束算法在原点云中提取舱门或舱门边框的关键点,不仅能够降低数据量,也保留了原点云的显著特征,并采用改进icp配准算法对舱门装配位姿进行精确测算,提高了测算结果的准确性,其中,法线夹角约束有效的排除噪声点的干扰,过滤错误的对应点对,从而提高算法的准确性。
- 还没有人留言评论。精彩留言会获得点赞!