机械臂取料方法和装置与流程
本发明涉及机器人取料,具体涉及一种机械臂取料方法和装置。
背景技术:
1、目前市面上普遍的机械臂取料方案是:物料通过输送线传动,通过人工手动示教的方式,确定输送线上一点作为机械臂码垛取料的点位。之后每次取料流程,机械臂末端部件都会先移动到示教的取料点位进行取料。这样取料的问题有:(1)物料的尺寸种类繁多,每次输送线切换物料时,都需要人工手动示教调整取料点位。(2)当机械臂需要加装升降柱时,同种物料需要针对不同高度,需要人工手动示教多个取料点位。(3)多次人工手动示教点位,耗时耗力,对操作人员专业素养要求高,影响生产效率。
技术实现思路
1、本发明为解决上述技术问题,提供了一种机械臂取料方法和装置,无需多次示教确定法兰中心的位姿,普适性较高,能够减少示教次数,提高生产效率。
2、本发明采用的技术方案如下:
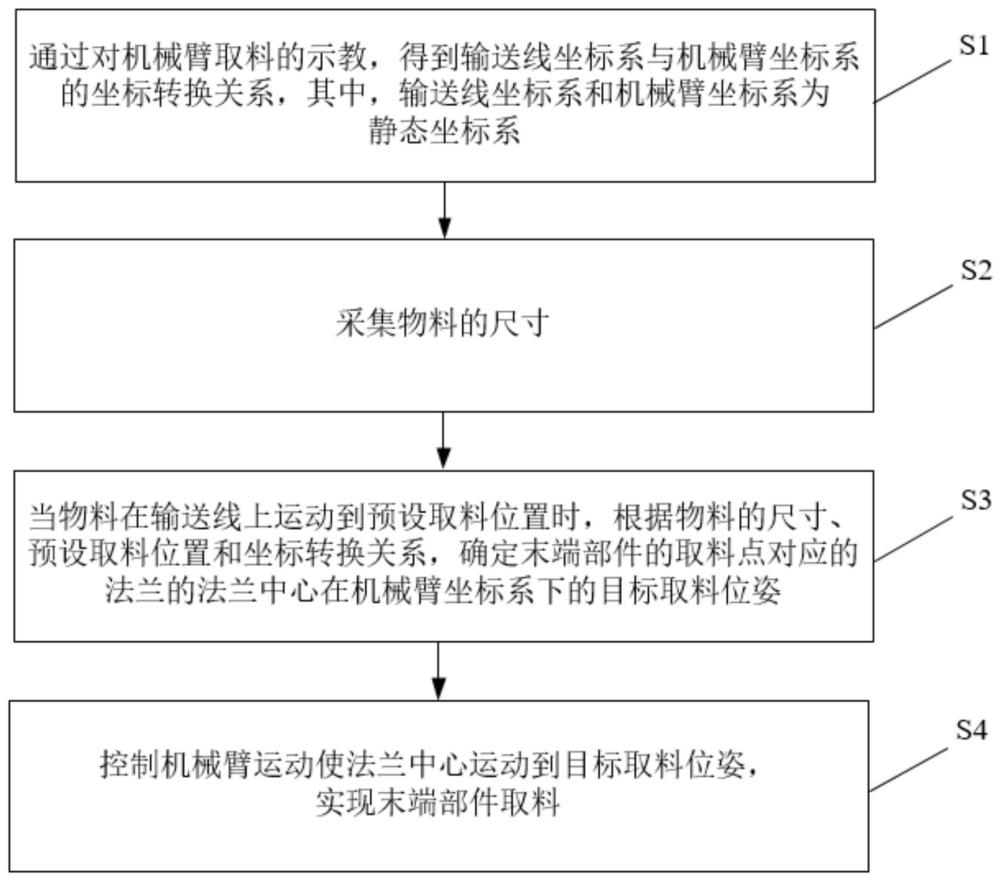
3、一种机械臂取料方法,通过输送线将物料输送至预设取料位置,所述机械臂包括末端部件和安装于所述末端部件上方的法兰,所述方法包括以下步骤:通过对机械臂取料的示教,得到输送线坐标系与机械臂坐标系的坐标转换关系,其中,所述输送线坐标系和所述机械臂坐标系为静态坐标系;采集所述物料的尺寸;当所述物料在所述输送线上运动到所述预设取料位置时,根据所述物料的尺寸、所述预设取料位置和所述坐标转换关系,确定所述末端部件的取料点对应的所述法兰的法兰中心在所述机械臂坐标系下的目标取料位姿;控制所述机械臂运动使所述法兰中心运动到所述目标取料位姿,实现所述末端部件取料。
4、另外,根据本发明上述提出的机械臂取料方法还可以具有如下附加技术特征:
5、根据本发明的一个实施例,通过对机械臂取料的示教,得到输送线坐标系与机械臂坐标系的坐标转换关系,具体包括:采集示教物料和所述末端部件的尺寸;调整所述示教物料和所述末端部件的位姿,使所述示教物料的一个角点位于所述输送线坐标系的原点上,实现所述末端部件取料;根据调整后的所述示教物料和所述末端部件的位姿,得到所述法兰中心在所述机械臂坐标系下的第一示教位姿和所述输送线坐标系的原点在法兰中心坐标系下的第二示教位姿,其中,所述法兰中心坐标系的原点为所述法兰中心;根据所述第一示教位姿和所述第二示教位姿,得到所述输送线坐标系的原点在所述机械臂坐标系下的位姿,即所述输送线坐标系与所述机械臂坐标系的坐标转换关系。
6、根据本发明的一个实施例,基于齐次变换矩阵得到所述第一示教位姿、所述第二示教位姿和所述输送线坐标系的原点在所述机械臂坐标系下的位姿。
7、具体地,所述第一示教位姿为:
8、
9、其中,表示所述法兰中心坐标系相对于所述机械臂坐标系的旋转,bpforg表示所述法兰中心在所述机械臂坐标系中的位置;
10、所述第二示教位姿为:
11、
12、其中,表示所述输送线坐标系相对于所述法兰中心坐标系的旋转,fpcorg表示所述输送线坐标系的原点在所述法兰中心坐标系中的位置;
13、所述输送线坐标系的原点在所述机械臂坐标系下的位姿为:
14、
15、根据本发明的一个实施例,通过对机械臂取料的示教,得到输送线坐标系与机械臂坐标系的坐标转换关系之前,还包括:根据所述末端部件的取料点和所述法兰中心之间的转角,对所述法兰中心坐标系的姿态进行角度补偿。
16、根据本发明的一个实施例,当所述物料在所述输送线上运动到所述预设取料位置时,根据所述物料的尺寸、所述预设取料位置和所述坐标转换关系,确定所述末端部件的取料点对应的所述法兰的法兰中心在所述机械臂坐标系下的目标取料位姿,具体包括:根据所述物料的尺寸和所述预设取料位置,确定所述末端部件的取料点在所述输送线坐标系下的位姿;根据所述末端部件的取料点在所述输送线坐标系下的位姿和所述坐标转换关系,确定取料点对应的法兰中心在机械臂坐标系下的目标取料位姿。
17、此外,为实现上述目的,本发明还提出一种机械臂取料装置。
18、一种机械臂取料装置,通过输送线将物料输送至预设取料位置,所述机械臂包括末端部件和安装于所述末端部件上方的法兰,所述装置包括:示教模块,通过所述示教模块对机械臂取料的示教,得到输送线坐标系与机械臂坐标系的坐标转换关系,其中,所述输送线坐标系和所述机械臂坐标系为静态坐标系;采集模块,所述采集模块用于采集所述物料的尺寸;定位模块,所述定位模块用于当所述物料在所述输送线上运动到所述预设取料位置时,根据所述物料的尺寸、所述预设取料位置和所述坐标转换关系,确定所述末端部件的取料点对应的所述法兰的法兰中心在所述机械臂坐标系下的目标取料位姿;控制模块,所述控制模块用于控制所述机械臂运动使所述法兰中心运动到所述目标取料位姿,实现所述末端部件取料。
19、另外,根据本发明上述提出的机械臂取料装置还可以具有如下附加技术特征:
20、根据本发明的一个实施例,所述示教模块具体用于:采集示教物料和所述末端部件的尺寸;调整所述示教物料和所述末端部件的位姿,使所述示教物料的一个角点位于所述输送线坐标系的原点上,实现所述末端部件取料;根据调整后的所述示教物料和所述末端部件的位姿,得到所述法兰中心在所述机械臂坐标系下的第一示教位姿和所述输送线坐标系的原点在法兰中心坐标系下的第二示教位姿,其中,所述法兰中心坐标系的原点为所述法兰中心;根据所述第一示教位姿和所述第二示教位姿,得到所述输送线坐标系的原点在所述机械臂坐标系下的位姿,即所述输送线坐标系与所述机械臂坐标系的坐标转换关系。
21、根据本发明的一个实施例,所述示教模块基于齐次变换矩阵得到所述第一示教位姿、所述第二示教位姿和所述输送线坐标系的原点在所述机械臂坐标系下的位姿。
22、具体地,所述第一示教位姿为:
23、
24、其中,表示所述法兰中心坐标系相对于所述机械臂坐标系的旋转,bpforg表示所述法兰中心在所述机械臂坐标系中的位置;
25、所述第二示教位姿为:
26、
27、其中,表示所述输送线坐标系相对于所述法兰中心坐标系的旋转,fpcorg表示所述输送线坐标系的原点在所述法兰中心坐标系中的位置;
28、所述输送线坐标系的原点在所述机械臂坐标系下的位姿为:
29、
30、根据本发明的一个实施例,还包括:补偿模块,所述补偿模块用于根据所述末端部件的取料点和所述法兰中心之间的转角,对所述法兰中心坐标系的姿态进行角度补偿。
31、根据本发明的一个实施例,所述定位模块具体用于:根据所述物料的尺寸和所述预设取料位置,确定所述末端部件的取料点在所述输送线坐标系下的位姿;根据所述末端部件的取料点在所述输送线坐标系下的位姿和所述坐标转换关系,确定取料点对应的法兰中心在机械臂坐标系下的目标取料位姿。
32、本发明的有益效果:
33、本发明的机械臂取料方法,通过对机械臂取料的示教,得到输送线坐标系与机械臂坐标系的坐标转换关系,根据物料的尺寸、预设取料位置和坐标转换关系,确定法兰中心在机械臂坐标系下的目标取料位资,控制机械臂运动实现末端部件取料,无需多次示教确定法兰中心的位姿,普适性较高,能够减少示教次数,提高生产效率。
- 还没有人留言评论。精彩留言会获得点赞!