一种无源助力上肢外骨骼机械臂
:本技术属于可穿戴机械设备,具体涉及一种性能、特点与人体生理特点互相适应,合理匹配的无源助力上肢外骨骼机械臂。
背景技术
0、
背景技术:
1、手过头作业是手部高于肩部或肩关节屈伸角度大于60度时进行的手部作业任务,在汽车、飞机、船舶的维修与装配中十分常见。随着新型交通工具的不断发展,对维修工作的要求与日俱增。手过头作业需要手持工具进行维修,手过头姿势的长时间维持和维修工具的重量会给肩膀带来很大的负荷,进而导致肩部的肌肉骨骼损伤;同时,长时间重复性的上肢手过头维修作业易导致背部、腰部的肌肉损伤,诱发骨骼劳损,严重影响维修的效果、限制产能的提高。
2、基于动力来源,上肢外骨骼可以分为有源助力上肢外骨骼和无源助力上肢外骨骼两类:有源助力上肢外骨骼是指借助驱动元器件为上肢提供动力的外骨骼,其动力来源一般为:电机驱动、液压驱动、气动肌肉驱动等;无源助力上肢外骨骼无需外部能源,一般是通过弹性储能元器件释放储存的能量产生助力功能,其动力来源一般为弹簧、卷簧、弹性软体材料等的弹性势能。
3、相对来说,有源上肢助力外骨骼可以提供更强大的能量和助力效果,并且可以利用电子系统进行精准的控制,甚至可以结合人工智能技术进行自主学习,以适应使用者的操作需求,主要应用于医疗康复领域、军用增强领域、残疾人辅助领域等。但是,有源上肢助力外骨骼需要强大的能量来源,受限于目前的供能技术,还无法作为一种轻量化的便携设备来使用,多为重量过重或无法移动的大型设备。
4、无源助力上肢外骨骼作为一种轻便的可穿戴辅助设备,不需要较重的供能部分,即可利用人机相容性技术和仿生技术将上肢承担的重量转移到腰部等部位,减轻上肢疲劳,降低患病风险。
5、现有技术中的外骨骼从结构方面看,具有贴合肩部运动状态的肩部复合体,以在结构和活动方式上与人体运动轨迹更加吻合。美国suitx于2016年开发的无源辅助外骨骼系统,分为shoulderx、backx和legx三套设备,既可以单独使用,又可以搭配起来共同实现辅助效果。其中,shoulderx即是无源助力上肢外骨骼,通过肩部复合体将手臂和工具的负载转移到佩戴者的臀部,从而对肩部起到支撑助力效果。在使用工具进行持久静态和重复性头顶任务期间,shoulderx能显著降低肩部的中位和峰值肌肉活动,是有效降低肩部疲劳和受伤风险的重要设备。目前,这款外骨骼已经发展到了第三代,与上一代相比,重量减轻了40%,但助力效果并没有减少。现代汽车集团于2017年开发的可穿戴外骨骼机器人vestexoskeleton(vex)旨在辅助进行长时间手过头作业,减少肌肉骨骼劳损并提高生产力,其肩部结构具有多个旋转轴,可以贴合肩部的运动轨迹,在助力的同时又不影响作业效果。vex的重量为2.5公斤,背部高度具有18厘米的可调范围,同时具备6个级别的辅助力。
6、随着科学技术的发展,外骨骼的设计向着更佳的灵活性和自由度发展,不再具有贴合肩部运动状态的肩部复合体,转而向外、向后做出一定的拓展。美国ekso bionics于2017年开发的eksovest上肢辅助支撑外骨骼可抬高和支撑手臂,以协助完成从胸部到头顶的任务。eksovest由上臂支撑组件、背部支撑组件、腰部支撑组件、传动连杆组件及驱动器组件构成,其特殊之处在于采用了两对可旋转的传动连杆组件,在起到支撑作用的同时,又能使得外骨骼可以灵活转动而不影响操作任务。结构原理如下,外骨骼工作时,驱动器中的弹簧产生反作用力将通过两对可旋转的传动连杆组件转移到系统下部,由腰部和臀部承受,大幅降低受伤概率,提高工作效率。另外,还具有减轻经常抬头导致的颈部疲劳的颈部支撑。目前,该系统已经在福特汽车公司和波音公司的生产线中得到实际应用。德国ottobock于2018年开发的paexo shoulder无动力上肢助力外骨骼在穿戴时不仅可以在手过头作业期间为肩膀和手臂提供明显的助力,而且不会影响正常的坐与行,其通过纯机械拉绳技术与弹簧储能实现助力效果,支持频繁和持续的手过头工作,包括物流系统中的装配线工作或神经外科手术中的架空工作。paexo shoulder重量只有1.9公斤,将手臂的重量转移至腰部和臀部,臀部的球形接头使得储能主体可以自由转动,不会产生僵硬的转动效果。西班牙cyber human system于2019年开发的besk便携式外骨骼重量为3kg,可承载3至12kg的重量,十分灵活,主体向后方拓展,不会与身体产生摩擦与碰撞。besk外骨骼有两种型号:besk g外骨骼支持手过头作业和besk b外骨骼支持水平位移作业,前者通过为上臂提供支撑辅助完成手过头作业,后者通过为肘部和小臂提供支撑辅助完成水平位置的重复性任务,维持正确姿势和减轻负载。
7、赤源动力(大连)科技公司于2018年研发cdys肩部助力工业外骨骼应用于重复性抬臂工作岗位,基于人体肩胛骨运动特点设计的多自由度碳纤维骨架系统只有2.4kg,在提供稳定强劲的随动支撑力的同时,能够在不更换配件的情况下进行7个支撑力档位的调节。当手臂处于自然下垂状态或行走摆臂的非工作状态时,助力大小会自动改变,不会造成阻碍。海同工业于2019年研发的exo泰坦臂上肢助力外骨骼与ottobock的paexo shoulder相类似,都是将手臂下摆时的能量存储于储能盒,在手臂上举时重新释放能量,并为手臂提供支撑力。其材质为碳纤维、钛合金、工程塑料、航空铝材、透气柔性包裹材料等,重量较轻,仅为2.3kg,单臂可以提供最大5kg的支撑力,助力大小可以通过扳手快速调节,目前已应用于上海飞机制造厂、长安福特、东风日产等。
8、人机相容性的目的是指设备需要在满足生理尺寸的基础上进一步匹配人体运动的自由度和可达范围。现有技术中的外骨骼系统通常采用金属刚性结构,同时,因为运动轴线的不重合,易导致机体与人体之间产生不良的剪切力或摩擦力。既影响能量的传递效率,又对人体产生损伤。因此,需要研发设计一种无源助力上肢外骨骼机械臂,在设计时充分考虑人机相容性的目的,使人机系统中机器的性能、特点与人的身体、生理特点互相适应,合理匹配。
技术实现思路
0、
技术实现要素:
1、本实用新型的目的在于克服现有技术存在的缺点,寻求设计一种无源助力上肢外骨骼机械臂,基于人机相容性的目的,提高与人体的适配性。
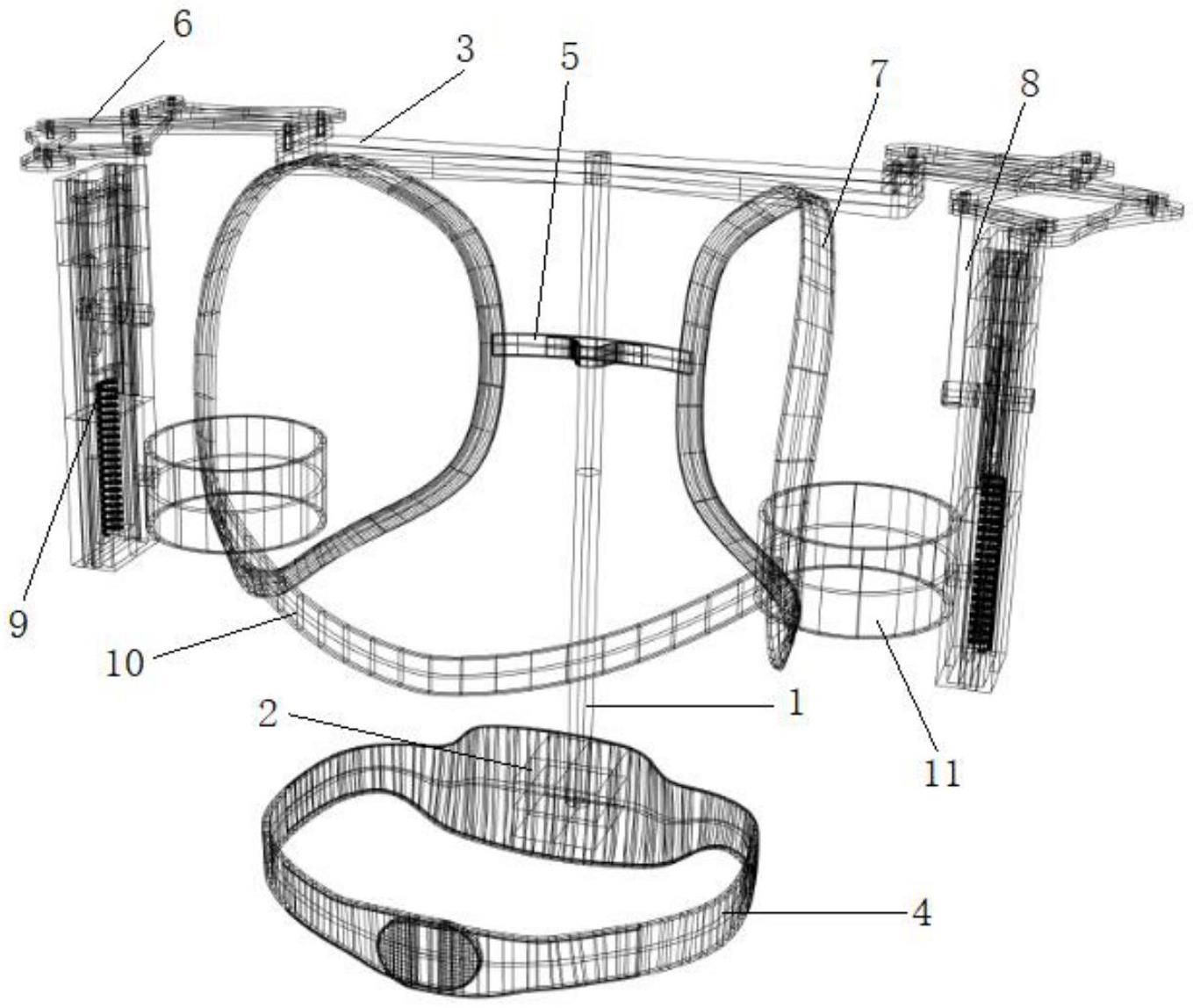
2、为了实现上述目的,本实用新型涉及的无源助力上肢外骨骼机械臂的主体结构包括支撑杆底部设置的腰部固定带、顶部设置的肩部构件,及两个肩部固定带,以及驱动器和驱动器上设置的手臂固定带;腰部固定带通过腰部固定件设置于支撑杆的底部;肩部构件通过背部固定件设置于支撑杆的顶部;两个肩部固定带设置于背部固定件上部设置的肩部固定件的两端;驱动器通过连接件与肩部构件连接。
3、本实用新型涉及的肩部构件的主体结构包括第一连杆、第二连杆、第三连杆、第四连杆、第五连杆、第六连杆和销轴;第一连杆的两端固定于背部固定件的端部,上端与第二连杆连接,下端与第三连杆连接,第四连杆的中部与第二连杆的中部连接,底端与第三连杆连接,顶端与第五连杆连接,第六连杆的底端与第二连杆连接,顶端与第五连杆连接,构成可伸缩折叠式结构;上述连接均通过销轴实现。
4、本实用新型涉及的驱动器由作为储能元件的弹簧和固定旋转轴与齿轮或连杆组成。
5、本实用新型涉及的无源助力上肢外骨骼机械臂的旋转中心不在某个销轴上,而是在肩部构件之外的肩部正上方。
6、本实用新型与现有技术相比,肩部构件的旋转圆心在肩部正上方,使得肩部附近留有足够的空间,能够减少外骨骼与人体的摩擦,手臂放下时,驱动器中的储能元件开始储存能量,手臂抬起时,储能元件释放能量,为手臂抬起提供助力;其结构简单,原理科学可靠,一方面,以弹簧作为设置在手臂两侧的驱动器的储能元件,另一方面,肩部构件使外骨骼与人体之间留出一部分空间,降低了外骨骼对人体的摩擦与冲突。
- 还没有人留言评论。精彩留言会获得点赞!