一种控制信息交互智能机器人的制作方法
本技术属于智能机器人,涉及一种交互智能机器人,特别是一种控制信息交互智能机器人。
背景技术:
1、智能机器人,其实是一种功能多样化的智能设备,相当于在一个智能设备中集成了不同种类的智能设备的不同功能,而一个好的智能机器人注重的就是使用者与智能机器人之间的控制信息的交互。
2、随着社会的不断进步,人们常常也需要来到图书馆进行读书学习,不断的充实自己,但是大部分图书馆存在管理杂乱,学习环境嘈杂,急需一款专注于图书管理的控制信息交互智能机器人,现有的控制信息交互智能机器人不具备书籍管理的能力,不能自动进行书籍的查找、拿取和摆放,服务效果差强人意。
3、经检索,如中国专利文献公开了一种图书智能服务机器人【申请号:201921501757.3;公开号:cn211278419u】。这种智能服务机器人包括底座,其底部设置有滚轮;两个支架均垂直于所述底座向上设置;主机设在两个支架的顶部,其上设置有触摸显示屏和摄像头;多个托书板,为设置于两个支架之间的多个平板,每个托书板的面板上设置有用于识别书本信息的rfid扫描条和用于将放置在所述面板上的书本移送出去的滚轮。
4、该专利中公开的智能服务机器人虽然能够进行书籍的归还,但是,该不能进行书籍的拿取和管理,智能化低下,不能满足人们的需求,程序死板,不能避免和路人碰撞,存在一定的风险。
5、基于此,我们提出了一种控制信息交互智能机器人,本装置能够辅助和指引使用者完成需要的交互并下达交互指令,控制智能机器人服务于使用者,降低使用者的劳动强度,营造出舒适的环境;能够避免本装置在移动过程中碰撞到人或者物,保障了本装置的安全;能够快速便捷的对书籍进行夹取,还能够快速便捷的将书籍归还到指定位置,不会造成书籍摆放杂乱的现象出现。
技术实现思路
1、本实用新型的目的是针对现有的技术存在上述问题,提出了一种控制信息交互智能机器人,该实用新型要解决的技术问题是:如何满足不同需求的使用者简单方便的与智能机器人进行交互,同时本智能机器人具备书籍自动拿取、归还和管理的功能。
2、本实用新型的目的可通过下列技术方案来实现:
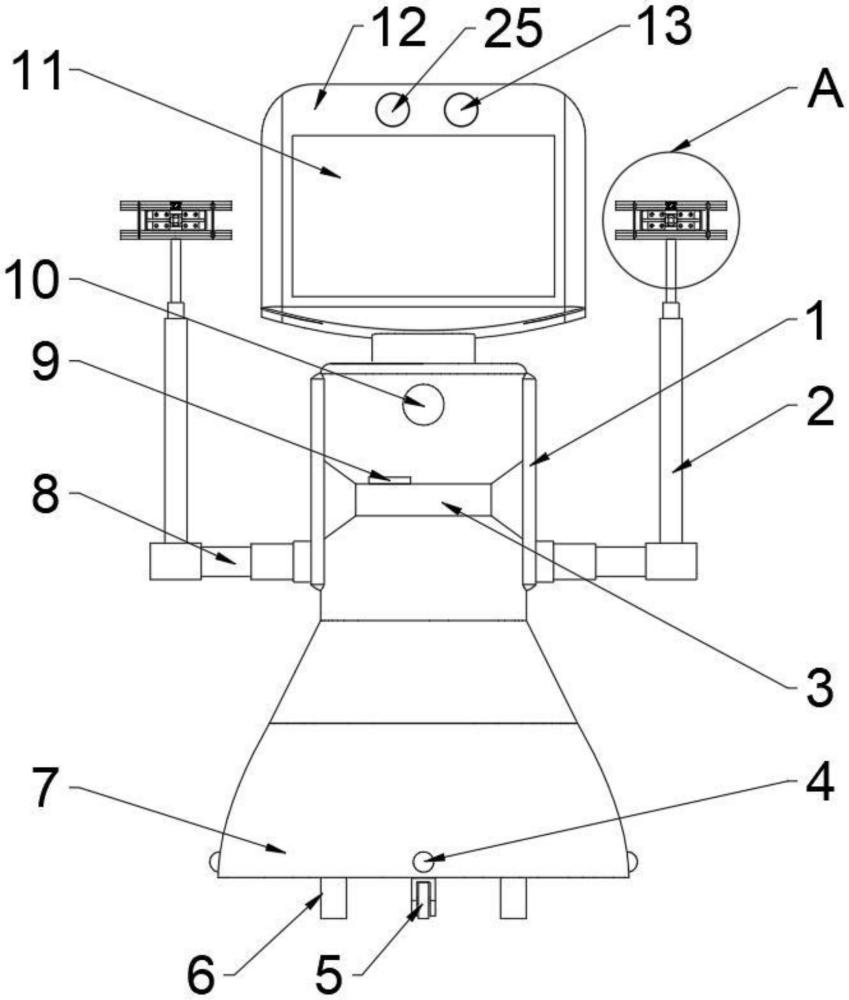
3、一种控制信息交互智能机器人,包括主体躯壳,所述主体躯壳的内部设有转动电机,主体躯壳的顶部转动设有转动柱,转动电机的输出轴通过联轴器与转动柱传动连接,转动柱的端部固定有机器人头部,机器人头部上设有触摸显示屏、识别摄像头、热成像摄像头、音频播报器和警报器,机器人头部的内部设有主控板,主控板上设置有控制信息系统,控制信息系统包括处理器模块、功能选择模块和书籍拿取模块,主体躯壳的前端面上设有放置平台和人体接近传感器,放置平台上设有电磁识别器,主体躯壳的底部设置有移动机构,移动机构上设有若干圆周分布的距离传感器,主体躯壳的两侧设置有对称分布的夹取臂系统。
4、本实用新型的工作原理是:使用者将身份证件放置在电磁识别器内,电磁识别器将身份信息传递给处理器模块,或者通过识别摄像头进行人脸识别,识别摄像头将身份信息传递给处理器模块,通过控制信息系统引导并辅助使用者完成使用者需要的操作,通过移动机构能够带动本装置进行移动,通过距离传感器,能够使得本装置在移动时避开障碍物体,避免发生碰撞,通过人体接近传感器,能够使得本装置在移动时自动避开人群,避免碰撞到人群造成误伤,通过控制信息系统与移动机构配合,能够将本装置移动到指定位置,通过夹取臂系统能够对指定书籍进行拿取或归还,本装置还能在移动过程中通过热成像摄像头进行防火巡查,检测图书馆内的温度,避免发生火灾,提高了书籍保护的安全性;通过音频播报器和警报器,能够对使用者发出声音指引和警告。
5、所述移动机构包括驱动底座,驱动底座内部设有驱动电源,驱动底座固定在主体躯壳的底部,若干圆周分布的距离传感器固定在驱动底座的外壁上,驱动底座的底部转动设有两个对称分布的动力轮,驱动底座的底部转动设有转向轮,驱动底座的内部设有动力电机和转向电机,动力电机的输出轴通过皮带轮组与两个动力轮传动连接,转向电机的输出轴通过联轴器与转向轮传动连接。
6、采用以上结构,启动动力电机,动力电机的输出轴通过皮带轮组带动动力轮转动,从而进行移动,当需要转弯时,启动转向电机,转向电机的输出轴通过联轴器带动转向轮转动,从而完成转向。
7、所述夹取臂系统包括液压杆,液压杆的固定端固定在主体躯壳的外壁上,液压杆的伸缩端固定有支撑块,支撑块上固定有电动推杆,电动推杆的伸缩端设置有夹取机构。
8、采用以上结构,启动液压杆,液压杆的伸缩端带动支撑块移横向动,支撑块带动电动推杆横向移动,电动推杆带动夹取机构横向移动,进行横向坐标调节;启动电动推杆,电动推杆的伸缩端带动夹取机构竖向调节,进行竖向坐标调节。
9、所述夹取机构包括固定块,固定块固定在电动推杆的伸缩端的端部,固定块的外壁上固定有气动推杆,固定块的内部滑动连接有滑块,气动推杆的伸缩端与滑块固定连接,固定块的端部开设有滑槽,滑槽内滑动连接有两个对称分布的夹取板,两个夹取板与滑块之间均通过连接杆铰接,滑块的端部设有定位摄像头,固定块的外壁上设置有调节组件。
10、采用以上结构,启动气动推杆,气动推杆的伸缩端伸出带动滑块移动,滑块通过连接杆带动两个夹取板张开,同时通过电动推杆将本机构送至竖向指定位置,通过定位摄像头进行书籍信息核对和位置确认,再通过调节组件将需要拿取或归回的书籍位置空出,启动气动推杆,气动推杆的伸缩端缩回带动滑块移动,滑块通过连接杆带动两个夹取板紧合对书本进行夹取。
11、所述调节组件包括两个对称分布的防护盒,两个防护盒分别固定在固定块的两侧外壁上,两个防护盒的顶部均为敞口,其中一个防护盒内部设有调节电机和正反牙螺纹杆,正反牙螺纹杆转动连接在防护盒的内部,调节电机的输出轴通过齿轮组与正反牙螺纹杆传动连接,另一个防护盒的内部固定有限位杆,正反牙螺纹杆上螺纹连接有两个对称分布的螺纹块,限位杆上滑动连接有两个对称分布的安装块,对应位置的螺纹块与安装块之间固定有调节板。
12、采用以上结构,通过移动机构和电动推杆的配合,将两个调节板插入目标书籍位置的两侧,启动调节电机,调节电机的输出轴通过齿轮组带动正反牙螺纹杆转动,正反牙螺纹杆带动两个调节板反向移动,空出夹取空间或归还书籍的拜访空间。
13、所述功能选择模块包括书籍查询子模块、空位预约子模块、地图导航子模块,书籍拿取模块包括自行拿取子模块和机器拿取子模块,书籍查询子模块包括书籍借读单元、书籍归还单元和书籍外带单元,空位预约子模块包括预约位置导航单元和预约位置地图单元,地图导航子模块包括地图查看单元和机器导航单元。
14、采用以上结构,使用者将身份证件放置在电磁识别器内,电磁识别器将身份信息传递给处理器模块,处理器模块将信息传递给功能选择模块,功能选择模块提供书籍查询子模块、空位预约子模块、地图导航子模块三种选择,使用者根据需求选择相应的子模块,当使用者选择地图导航子模块时,地图导航子模块提供地图查看单元和机器导航单元两种选择,通过地图查看单元能够对图书馆的地图进行查看,通过机器导航单元能够将目标位置坐标传递给处理器模块,处理器模块控制智能机器人移动进行导航,当使用者选择空位预约子模块时,空位预约子模块提供预约位置导航单元和预约位置地图单元两种选择,通过预约位置地图单元能够查看预约位置的坐标,需要使用者自行前往,通过预约位置导航单元能够将预约位置的坐标信息传递给处理器模块,处理器模块控制智能机器人移动进行导航,当使用者选择书籍查询子模块,书籍查询子模块提供书籍借读单元、书籍归还单元和书籍外带单元三种选择,通过书籍外带单元能够自动办理书籍外带信息登记并存储登记信息,通过书籍借读单元和书籍归还单元,能够进行书籍的借出和归还登记,然后书籍借读单元和书籍归还单元将登记信息传递给书籍拿取模块,书籍拿取模块提供自行拿取子模块和机器拿取子模块两种选择,当使用者选择自行拿取子模块时,自行拿取子模块会显示目标书籍的位置坐标,并将登记的身份信息等传递给处理器模块,处理器模块通过蓝牙子模块或者wifi子模块将身份信息传递给电磁核验阀门,使用者通过专属的电磁卡进行身份验证识别即可进入存书库拿取,当使用者选择机器拿取子模块时,机器拿取子模块将书籍信息和书籍位置坐标等信息传递给处理器模块,处理器模块控制智能机器人前去拿取。
15、与现有技术相比,本控制信息交互智能机器人具有以下优点:
16、1、通过移动机构、距离传感器和人体接近传感器配合,能够避免本装置在移动过程中碰撞到人或者物,保障了本装置的安全。
17、2、通过夹取臂系统,能够快速便捷的对书籍进行夹取,还能够快速便捷的将书籍归还到指定位置,不会造成书籍摆放杂乱的现象出现。
18、3、通过控制信息系统,能够辅助和指引使用者简单方便的完成需要的交互并下达交互指令,控制智能机器人服务于使用者,降低使用者的劳动强度,营造出舒适的环境。
- 还没有人留言评论。精彩留言会获得点赞!