执行机器人应用和创建用来执行机器人应用的程序的制作方法
本发明涉及一种用于创建用来执行机器人应用的程序的方法和系统,该机器人应用包括第一机器人的多个动作、特别是运动,特别是涉及用于执行机器人应用的方法和系统,以及一种用于执行在此所述方法的计算机程序或计算机程序产品。
背景技术:
1、在许多机器人应用中会使用不同制造商的机器人,特别是来自不同制造商的机器人被一起使用、选择性地使用,等等。在此,这些机器人必须被分别单独地或者说特定于制造商地编程。
2、另一方面,例如对于使用json-ld的互联网而言,已知一种基于上下文的数据格式或数据结构,其特别适合作为机器之间的接口。
技术实现思路
1、本发明的任务是更好地执行机器人应用或更好地创建用于执行机器人应用的程序。
2、本发明的目的通过具有权利要求1或5所述特征的方法来实现。权利要求6、7要求保护一种用于执行在此所述方法的系统或计算机程序产品。从属权利要求给出了优选的扩展方案。
3、根据本发明的一种实施方式,机器人应用包括第一机器人的多个动作。
4、在一种实施方式中,这些动作中的一个或多个动作分别包括第一机器人的一个或多个运动,特别可以是这样的运动。在一种实施方式中,第一机器人和/或后续提及的其他机器人(分别)具有一个机器人臂,该机器人臂具有至少三个关节、特别是至少六个关节,在一种实施方式中为转动关节。
5、根据本发明的一种实施方式,用于创建用来执行机器人应用的程序的方法包括以下步骤:
6、-采集编程输入以对第一机器人的动作进行编程;以及
7、-基于所采集到的编程输入创建程序。
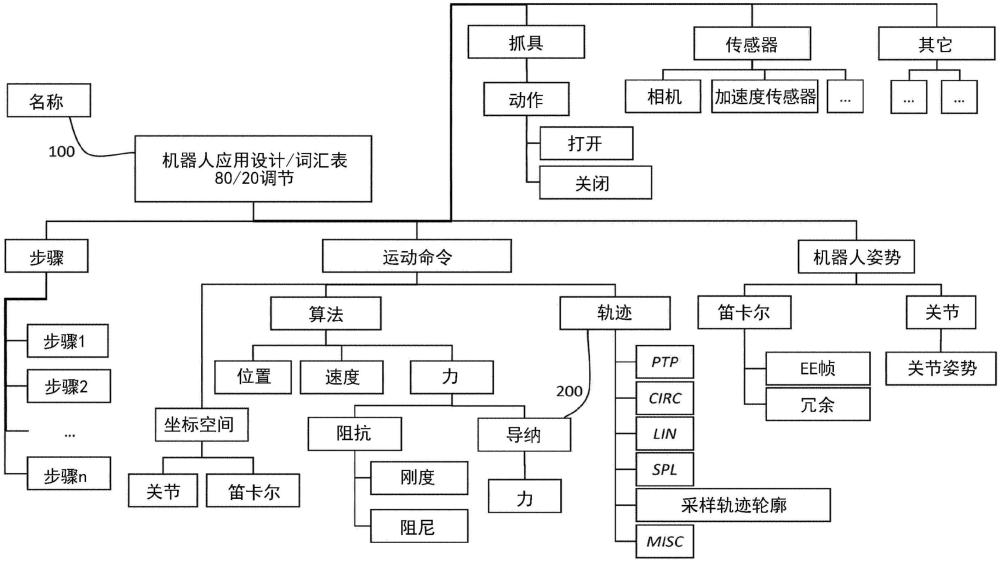
8、根据本发明的一种实施方式,特别地,对于不同的机器人、特别是不同类型的机器人和/或不同制造商的机器人,统一地预先设定输入名称或密钥或者具有输入名称或密钥的词典(lexikon)或词汇表(vokabular),在一种实施方式中是根据上下文(kontext)来设定,在一种实施方式中是根据预先给定的上下文来设定,在一种扩展方案中是通过json-ld或类似的标准或数据格式或数据结构来设定。随后,为了创建程序或在创建程序的过程中,(分别)基于
9、-(这些)统一设定的输入名称,在一种实施方式中是根据上下文统一设定的输入名称,或者相应的编程输入所使用的词典的输入名称,以及
10、-针对所使用的输入名称根据相应的编程输入所确定的内容,特别是一维或多维的值,
11、对编程输入进行解释(interpretiert),特别是将其转换为机器可读的程序指令或者用于第一机器人,在一种实施方式中是借助json-ld或类似的标准或数据格式或数据结构进行。
12、由此,在一种实施方式中,可以有利地针对不同的机器人对机器人应用进行编程,或者利用不同的机器人执行机器人应用。
13、附加地或替代地,根据本发明的一种实施方式,一个或多个编程输入(分别)包括
14、-对(第一机器人的)(每)一坐标空间的一个或多个说明,在一种扩展方案中是(分别)在多个预先给定的坐标空间之间的一个或多个选择,在一种实施方式中是对第一机器人的用于运动输入的坐标空间和/或用于姿势的坐标空间的说明。在一种实施方式中,预先给定的坐标空间,特别是用于运动输入和/或用于姿势的坐标空间,包括关节坐标空间和/或一个或多个工作空间,在一种扩展方案中包括固定于环境的坐标空间和/或固定于末端执行器的坐标空间和/
15、或固定于工件的坐标空间;和/或
16、-对第一机器人的调节方法的说明,特别是在多个预先给定的调节方法之间的选择,在一种扩展方案中,所述调节方法包括位置调节、速度调节和/或力调节,特别是阻抗调节和/或导纳调节;和/或对可能选择的调节方法的参数化;和/或
17、-对第一机器人的轨迹的说明,特别是在多个预先给定的轨迹类型之间的选择,在一种扩展方案中,轨迹类型包括点对点或者说ptp轨迹、圆弧段或者说circ轨迹、直线或者说lin轨迹、样条或者说spl轨迹、和/或一种或多种其它的轨迹类型;和/或对可能选择的轨迹(类型)的参数化;和/或
18、-对第一机器人的姿势、特别是目标姿势的说明、特别是参数化,特别是在多个预先给定的用于姿势的坐标空间之间进行选择的情况下,在一种扩展方案中,坐标空间包括关节坐标空间和/或一个或多个工作空间,在一种扩展方案中包括固定于环境的坐标空间和/
19、或固定于末端执行器的坐标空间和/或固定于工件的坐标空间;和/
20、或
21、-对第一机器人的工具动作的说明,特别是在多个预先给定的工具动作之间的选择,和/或对可能选择的工具动作的参数化;和/或
22、-对第一机器人的传感器类型和/或传感器动作的说明,特别是在多个预先给定的传感器类型和/或传感器动作之间的选择,其中,在一种实施方式中,传感器是由第一机器人引导的传感器。
23、通过这些编程输入,特别是提供或者说拥有这些编程输入的相应的词典或相应的上下文,机器人应用可以被特别简单、灵活和/或可靠地编程或执行。
24、在一种实施方式中,机器人应用包括至少一个另外的、不同于第一机器人的机器人的多个动作。在一种扩展方案中,这些动作中的一个或多个分别包括另外的机器人的一个或多个运动,特别可以是这样的运动。
25、在一种实施方式中,该方法包括以下步骤:
26、-采集编程输入以对另一机器人的这些动作进行编程;以及
27、-基于所采集到的编程输入创建程序。
28、在一种实施方式中,为了创建程序或在创建程序过程中,(分别)基于
29、-(这些)统一设定的输入名称,在一种实施方式中是根据上下文统一设定的输入名称,或者相应的编程输入所使用的词典的输入名称,以及
30、-针对所使用的输入名称根据相应的编程输入所确定的内容,特别是一维或多维的值,
31、对编程输入进行解释,特别是将其转换为机器可读的程序指令或者用于另一机器人,在一种实施方式中是借助json-ld或类似的标准或数据格式或数据结构进行
32、由此,在一种实施方式中,可以有利地针对多个不同的机器人对机器人应用进行编程或者执行机器人应用。
33、附加地或替代地,在一种实施方式中,一个或多个用于对另一机器人的动作进行编程的编程输入(分别)包括:
34、-对(另一机器人的)坐标空间的一个或多个说明,在一种扩展方案中是(分别)在多个预先给定的坐标空间之间的一个或多个选择,在一种实施方式中是对另一机器人的用于运动输入的坐标空间和/
35、或用于姿势的坐标空间的说明。在一种实施方式中,预先给定的坐标空间,特别是用于运动输入和/或用于姿势的坐标空间,包括关节坐标空间和/或一个或多个工作空间,在一种扩展方案中包括固定于环境的坐标空间和/或固定于末端执行器的坐标空间和/或固定于工件的坐标空间;和/或
36、-对另一机器人的调节方法的说明,特别是在多个预先给定的调节方法之间的选择,在一种扩展方案中,该调节方法包括位置调节、速度调节和/或力调节,特别是阻抗调节和/或导纳调节;和/或对可能选择的调节方法的参数化;和/或
37、-对另一机器人的轨迹的说明,特别是在多个预先给定的轨迹类型之间的选择,在一种扩展方案中,轨迹类型包括点对点或者说ptp轨迹、圆弧段或者说circ路径、直线或者说lin轨迹、样条或者说spl轨迹、和/或一种或多种其它的轨迹类型;和/或对可能选择的轨迹(类型)的参数化;和/或
38、-对另一机器人的姿势、特别是目标姿势的说明、特别是参数化,特别是在多个预先给定的用于姿势的坐标空间之间进行选择的情况下,在一种扩展方案中,坐标空间包括关节坐标空间和/或一个或多个工作空间,在一种扩展方案中包括固定于环境的坐标空间和/
39、或固定于末端执行器的坐标空间和/或固定于工件的坐标空间;和/
40、或
41、-对另一机器人的工具动作的说明,特别是在多个预先给定的工具动作之间的选择,和/或对可能选择的工具动作的参数化;和/或
42、-对另一机器人的传感器类型和/或传感器动作的说明,特别是在多个预先给定的传感器类型和/或传感器动作之间的选择,其中,在一种实施方式中。传感器是由第一机器人引导的传感器。
43、通过这些编程输入,特别是提供或者说拥有这些编程输入的相应的词典或相应的上下文,机器人应用针对多个不同的机器人可以被特别简单、灵活和/或可靠地编程或执行。
44、在一种实施方式中,根据对上下文的说明统一地预先设定输入名称,在一种扩展方案中是根据对已给定的上下文内部的类型的说明和/或借助json-ld来预先设定。
45、由此有利的是,在一种实施方式中,可以选择性地或交替地访问已给定的上下文内部的不同的上下文或不同的类型,或者利用json-ld来使用全球可用且结构良好的标准或数据格式。因此,在一种实施方式中,机器人应用可以被特别灵活和/或可靠地编程或执行。
46、在一种实施方式中,在创建程序时,借助于状态机(zustandsmaschine)来实现一个或多个编程动作。
47、由此,在一种实施方式中,可以有利地实现分支(verzweigungen)(“if…then…”,“if…else…”等)。
48、根据本发明的一种实施方式,用于执行机器人应用的方法包括以下步骤:
49、-根据在此所述的方法创建程序;以及
50、-借助于第一机器人并在必要时借助于另一机器人来执行所创建的程序。
51、根据本发明的一种实施方式,用于创建用来执行机器人应用的程序的系统,特别是用于执行机器人应用的系统,被硬件技术和/或软件技术、特别是程序技术地设计用于执行在此所述的方法,和/或包括:
52、-用于采集编程输入以对第一机器人的动作进行编程的装置;以及
53、-用于基于所采集到的编程输入来创建程序的装置。
54、根据本发明的一种实施方式,为了创建用于不同机器人的程序,统一地设定输入名称,在一种实施方式中是根据上下文统一地设定输入名称;并且该用于创建程序的装置包括用于基于相应的编程输入所使用的输入名称和针对所使用的输入名称根据相应的编程输入、特别是借助json-ld所确定的内容来解释编程输入的装置。
55、附加地或替代地,根据本发明的一种实施方式,至少一个编程输入包括:至少一个对(第一机器人)坐标空间的说明,特别是在多个预先给定的坐标空间之间的至少一个选择;对第一机器人的调节方法的说明,特别是在多个预先给定的调节方法之间的选择;对第一机器人的轨迹的说明,特别是在多种预先给定的轨迹类型之间的选择;对第一机器人的姿势的说明,特别是在多个预先给定的用于姿势的坐标空间之间进行选择的情况下;对第一机器人的工具动作的说明,特别是在多个预先给定的工具动作之间的选择;和/或对第一机器人的传感器类型和/或传感器动作的说明,特别是在多个预先给定的传感器类型和/或传感器动作之间的选择。
56、在一种实施方式中,机器人应用包括至少一个另外的、不同于第一机器人的机器人的多个动作、特别是运动,并且上述的系统或其装置包括:
57、-用于采集编程输入对另一机器人的这些动作进行编程的装置;以及
58、-用于基于所采集到的编程输入创建程序的装置。
59、在一种实施方式中,该用于创建程序的装置包括用于解释编程输入的装置,用于基于相应的编程输入所使用的统一设定的输入名称、在一种实施方式中为根据上下文统一设定的输入名称,和针对所使用的输入名称根据相应的编程输入、特别是借助json-ld所确定的内容对另一机器人的动作进行编程。
60、附加地或替代地,根据本发明的一种实施方式,至少一个用于对另一机器人的动作进行编程的编程输入包括:对(另一机器人)坐标空间的说明,特别是在多个预先给定的坐标空间之间的至少一个选择;对另一机器人的调节方法的说明,特别是在多个预先给定的调节方法之间的选择;对另一机器人的轨迹的说明,特别是在多个预先给定的轨迹类型之间的选择;对另一机器人的姿势的说明,特别是在多个预先给定的用于姿势的坐标空间之间进行选择的情况下;对另一机器人的工具动作的说明,特别是在多个预先给定的工具动作之间的选择;和/或对另一机器人的传感器类型和/或传感器动作的说明,特别是在多个预先给定的传感器类型和/或传感器动作之间的选择。
61、在一种实施方式中,上述的系统或其装置包括
62、-用于根据对上下文的说明、特别是根据对所说明的上下文内部的类型的说明和/或借助json-ld统一地设定输入名称的装置;和/或
63、-用于在创建程序过程中借助于状态机实现至少一个编程动作的装置;和/或
64、-用于借助于第一机器人并在必要时借助于另一机器人执行所创建的程序的装置。
65、本发明意义下的系统和/或装置可以硬件技术和/或软件技术地构成,特别是具有:至少一个优选与存储器系统和/或总线系统进行数据连接或信号连接的处理单元,特别是数字处理单元,特别是微处理器单元(cpu)、图形卡(gpu)等;和/或一个或多个程序或程序模块。处理单元可以为此被设计为:处理被实现为存储在存储系统中的程序的指令;从数据总线采集输入信号;和/或将输出信号发送至数据总线。存储系统可以具有一个或多个、特别是不同的存储介质,特别是光学的、磁的、固体的和/或其它非易失性的介质。程序可以如下地提供:其能够体现或执行在此所述的方法,使得处理单元能够执行该方法的步骤并由此特别是能够创建或执行程序。在一种实施方式中,计算机程序产品可以具有、可以特别是计算机可读的、非易失性的、用于存储程序或指令的存储介质或者其上存储有程序或其上存储有指令的存储介质。在一种实施方式中,通过系统或控制器、特别是计算机或多个计算机陈列执行该程序或指令,将允许该系统或控制器、特别是一个或多个计算机能够执行在此所述的方法或其一个或多个步骤,或者该程序或指令被设计用于此目的。
66、在一种实施方式中,该方法的一个或多个、特别是所有的步骤被完全或部分自动化地执行,特别是通过该系统或其装置。
67、在一种实施方式中,该系统具有第一机器人并在必要时具有另一机器人。
68、本发明是参考json-ld来阐述,因为这是一种已知的、有利的标准或数据格式或数据结构,但不以任何方式限制于此。
- 还没有人留言评论。精彩留言会获得点赞!