基于动力学补偿的机器人控制方法、系统、设备及介质与流程
本发明涉及机器人,具体是涉及基于动力学补偿的机器人控制方法、系统、设备及介质。
背景技术:
1、为了提升机器人的现场应用效能,大多数智能制造场景对于机器人的节拍要求较高,即要求机器人能够高速运动。机器人制造厂商在考虑到成本的情况下通常不会使用特别昂贵的电机、减速器等硬件设备,也就要求使用者通过设计相关算法来控制电机在机器人处于不同工况下能够输出持续稳定且安全的电流,以充分发挥机器人的电机性能。
2、为了提升机器人的节拍且控制电机发挥充分稳定的性能,通常在机器人的速度规划中引入动力学约束,然而对机器人进行动力学逆解得到的力矩值与机器人在实际运动过程中产生的实际反馈力矩值可能出现较大偏差,使得机器人在运动过程中的电机电流超出给定电流阈值,导致出现报警停机现象,从而损耗生产时间,即目前针对机器人的动力学偏差问题并没有较好的解决方法。
技术实现思路
1、本发明提供基于动力学补偿的机器人控制方法、系统、设备及介质,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
2、第一方面,提供一种基于动力学补偿的机器人控制方法,所述方法包括:
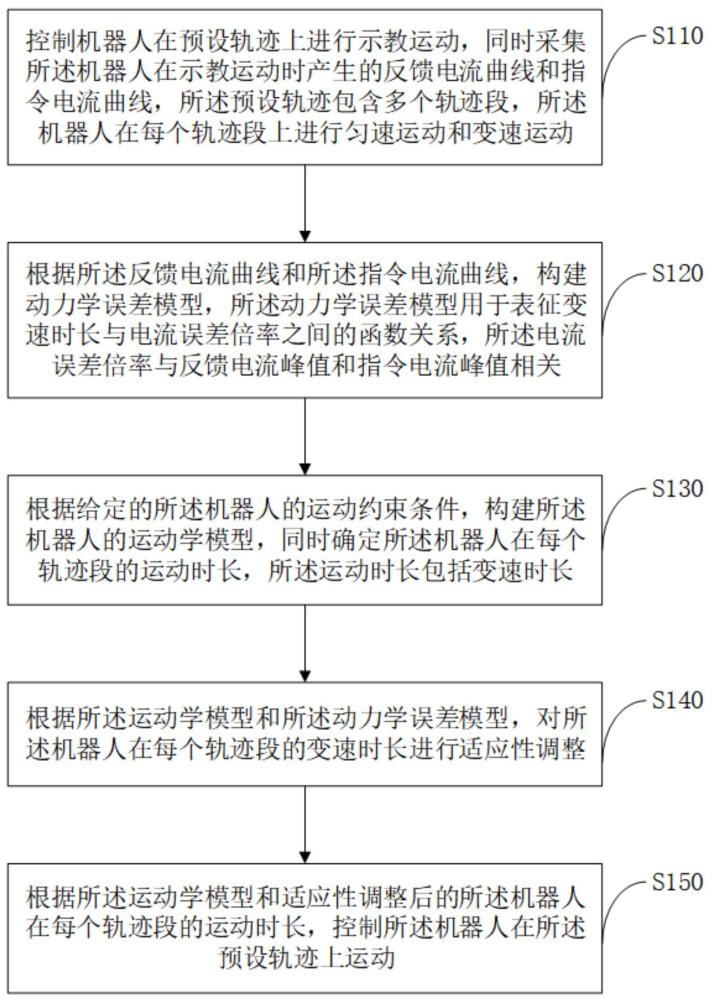
3、控制机器人在预设轨迹上进行示教运动,同时采集所述机器人在示教运动时产生的反馈电流曲线和指令电流曲线,所述预设轨迹包含多个轨迹段,所述机器人在每个轨迹段上进行匀速运动和变速运动;
4、根据所述反馈电流曲线和所述指令电流曲线,构建动力学误差模型,所述动力学误差模型用于表征变速时长与电流误差倍率之间的函数关系,所述电流误差倍率与反馈电流峰值和指令电流峰值相关;
5、根据给定的所述机器人的运动约束条件,构建所述机器人的运动学模型,同时确定所述机器人在每个轨迹段的运动时长,所述运动时长包括变速时长;
6、根据所述运动学模型和所述动力学误差模型,对所述机器人在每个轨迹段的变速时长进行适应性调整;
7、根据所述运动学模型和适应性调整后的所述机器人在每个轨迹段的运动时长,控制所述机器人在所述预设轨迹上运动。
8、进一步地,所述根据所述反馈电流曲线和所述指令电流曲线,构建动力学误差模型包括:
9、获取所述机器人在示教运动时出现的所有变速时间段;
10、从所述反馈电流曲线中提取在所述所有变速时间段下的所有反馈电流峰值,以及从所述指令电流曲线中提取在所述所有变速时间段下的所有指令电流峰值,进而确定在所述所有变速时间段下的所有电流误差倍率;
11、根据在所述所有变速时间段下的所有电流误差倍率,构建动力学误差模型。
12、进一步地,所述根据在所述所有变速时间段下的所有电流误差倍率,构建动力学误差模型包括:
13、根据所述所有变速时间段,确定所有变速时长;
14、对所述所有变速时长及其关联的所述所有电流误差倍率进行从一阶到n阶的多项式拟合,对应得到n个函数模型,n为大于1的正整数;
15、定义模型评价指标,从所述n个函数模型中获取使得所述模型评价指标达到最优的函数模型并作为动力学误差模型。
16、进一步地,所述根据所述运动学模型和所述动力学误差模型,对所述机器人在每个轨迹段的变速时长进行适应性调整包括:
17、对于所述多个轨迹段中的任一轨迹段,根据所述运动学模型和所述机器人在该轨迹段的变速时长,确定所述机器人在该轨迹段上进行变速运动时达到的最大加速度及其关联的速度;
18、根据预先构建的所述机器人的动力学模型、所述最大加速度和所述速度,确定所述机器人在该轨迹段上进行变速运动时产生的第一指令电流峰值;
19、根据所述动力学误差模型和所述机器人在该轨迹段的变速时长,确定所述机器人在该轨迹段上进行变速运动时产生的第一电流误差倍率;
20、根据所述第一指令电流峰值和所述第一电流误差倍率,确定所述机器人在该轨迹段上进行变速运动时产生的第一预测反馈电流峰值;
21、根据给定的反馈电流阈值和所述第一预测反馈电流峰值,对所述机器人在该轨迹段的变速时长进行适应性调整。
22、进一步地,所述根据给定的反馈电流阈值和所述第一预测反馈电流峰值,对所述机器人在该轨迹段的变速时长进行适应性调整包括:
23、判断所述反馈电流阈值和所述第一预测反馈电流峰值的差值绝对值是否小于给定的电流误差阈值;
24、若是,则保持所述机器人在该轨迹段的变速时长不变;
25、若否,则根据所述第一预测反馈电流峰值和所述反馈电流阈值之间的关系,对所述机器人在该轨迹段的变速时长进行调整,再返回根据所述运动学模型和所述机器人在该轨迹段的变速时长,确定所述机器人在该轨迹段上进行变速运动时达到的最大加速度及其关联的速度的步骤。
26、进一步地,所述根据所述第一预测反馈电流峰值和所述反馈电流阈值之间的关系,对所述机器人在该轨迹段的变速时长进行调整包括:
27、当所述第一预测反馈电流峰值大于所述反馈电流阈值时,延长所述机器人在该轨迹段的变速时长;
28、当所述第一预测反馈电流峰值小于所述反馈电流阈值时,缩短所述机器人在该轨迹段的变速时长。
29、进一步地,所述根据所述运动学模型和适应性调整后的所述机器人在每个轨迹段的运动时长,控制所述机器人在所述预设轨迹上运动包括:
30、利用所述运动学模型对适应性调整后的所述机器人在每个轨迹段的运动时长进行处理,得到所述机器人在不同时间下的运动参数;
31、根据所述机器人在不同时间下的运动参数,控制所述机器人在所述预设轨迹上运动。
32、第二方面,提供一种基于动力学补偿的机器人控制系统,所述系统包括:
33、第一模块,用于控制机器人在预设轨迹上进行示教运动,同时采集所述机器人在示教运动时产生的反馈电流曲线和指令电流曲线,所述预设轨迹包含多个轨迹段,所述机器人在每个轨迹段上进行匀速运动和变速运动;
34、第二模块,用于根据所述反馈电流曲线和所述指令电流曲线,构建动力学误差模型,所述动力学误差模型用于表征变速时长与电流误差倍率之间的函数关系,所述电流误差倍率与反馈电流峰值和指令电流峰值相关;
35、第三模块,用于根据给定的所述机器人的运动约束条件,构建所述机器人的运动学模型,同时确定所述机器人在每个轨迹段的运动时长,所述运动时长包括变速时长;
36、第四模块,用于根据所述运动学模型和所述动力学误差模型,对所述机器人在每个轨迹段的变速时长进行适应性调整;
37、第五模块,用于根据所述运动学模型和适应性调整后的所述机器人在每个轨迹段的运动时长,控制所述机器人在所述预设轨迹上运动。
38、第三方面,提供一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序以实现如第一方面所述的基于动力学补偿的机器人控制方法。
39、第四方面,提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面所述的基于动力学补偿的机器人控制方法。
40、本发明至少具有以下有益效果:通过获取机器人在示教运动过程中所生成的指令电流曲线和反馈电流曲线,以构建出用于表征电流误差倍率与变速时长之间的函数关系的动力学误差模型,再将该动力学误差模型应用到机器人在预设轨迹上的运动学规划过程中,以给定的反馈电流阈值作为控制条件,对原先规划好的机器人在该预设轨迹上的相关变速时长进行优化调整,进而对机器人在该预设轨迹上的相关运动参数作出同步优化调整,由此可以提高机器人的节拍,使得机器人的电机发挥充分稳定的性能,极大程度地减少超电流停机现象的发生,有助于提高机器人的工作效率。
- 还没有人留言评论。精彩留言会获得点赞!