一种用于机房智能巡检的机器人的制作方法
本发明涉及巡检机器人,具体为一种用于机房智能巡检的机器人。
背景技术:
1、为了确保机房的正常运行,需要定期进行巡检,并根据机房的重要程度和设备设施的复杂性设定不同的巡检周期。在巡检过程中,工作人员需要关注多个方面,包括机房的温度和湿度、环境和卫生状况、供电系统和设备设施、消防设施设备以及安防设备设施等。在巡检时,应记录设备设施的信息,并具备温度湿度联网报警功能,对机柜和供电进行编号管理,联网机柜供电和机房供电系统,记录机柜和机房电力使用情况。如果发现异常情况,还应立即进行现场处理,并报告给相应的负责人。传统的巡检需要消耗大量人力,因此,市面上出现了很多用于机房巡检的机器人,这不仅大大节省了人力、财力,还提高了巡检的精度。
2、常规用于机房巡检的机器人一般只带有机械臂或只有升降杆,单独的升降杆虽可安装监控摄像头但不能安装抓手实现开关门动作;带机械臂的机器人只能正面面对机柜门并保持一定距离才能进行开、关门动作,且开门后不能控制门的重心偏移,要预留开门距离,使得过道要保持较宽的宽度,不利于在有限的面积内堆叠合理数量的机柜,空间上造成浪费。传统机器人减震器中的弹簧和配套的摆臂连杆除了承受本应承受的上下压力之外,还承受了轮毂在转弯时所带来的水平剪切力,对摆臂连杆的寿命和运动精度有严重影响。
技术实现思路
1、本发明的目的在于提供一种用于机房智能巡检的机器人,以解决上述背景技术中提出的问题。
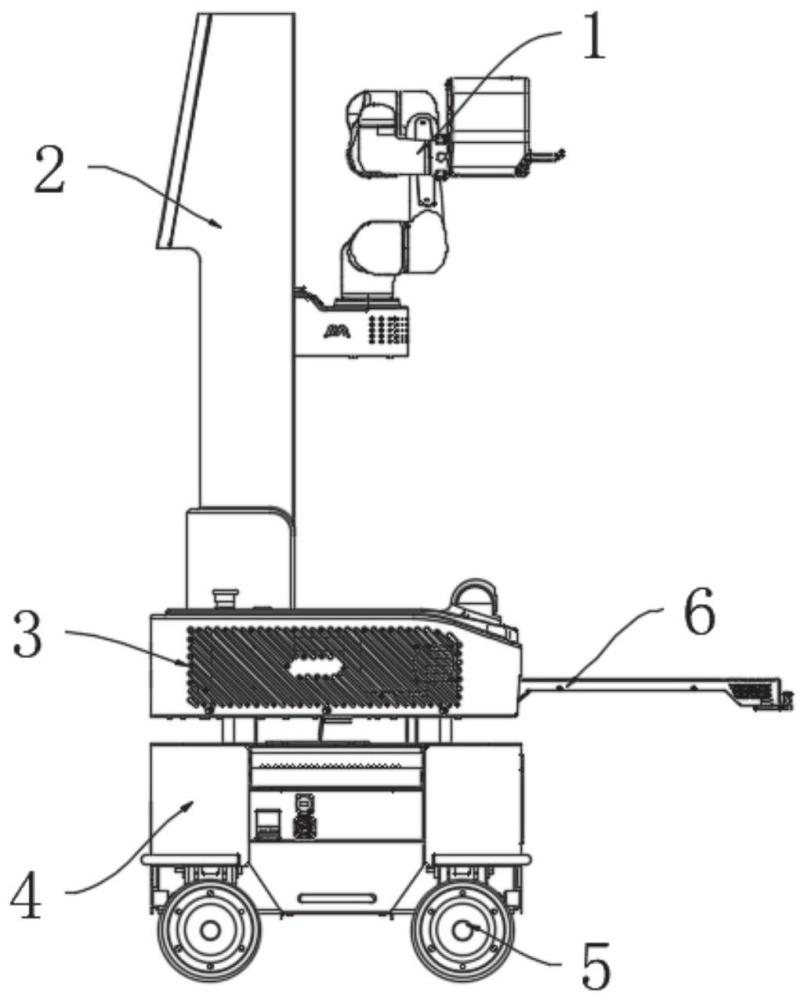
2、为了解决上述技术问题,本发明提供如下技术方案:一种用于机房智能巡检的机器人包括下装总成,下装总成底部安装有独立悬挂轮毂,下装总成上安装有上装总成,上装总成上安装有两个机械臂,两个机械臂互相配合进行开关门操作,其中一个机械臂对设备进行检查,下装总成和上装总成用于安装模块组件,升降机构用于使两个机械臂或者使其中一个机械臂上下平稳移动,独立悬挂轮毂用于过滤振动和保证机器人平稳运行。
3、上装总成内安装有电源模块系统和控制系统,控制系统用于控制机械臂、升降机构、上装总成、下装总成、独立悬挂轮毂;上装总成和下装总成均进行模块化堆叠设计,各个模块均设有独立的插线端子,当有模块发生故障时,只要取下该模块的插线端子和固定螺丝,即可取走进行单独修理、维护,不影响其他模块的装配,从而提高了维护便捷性和安全性。
4、两个机械臂为两个主机械臂,主机械臂为六轴机械臂,六轴机械臂一端与升降机构连接,六轴机械臂另一端安装有可拆卸更换的功能控制盒,功能控制盒上安装有机械抓手,功能控制盒内安装有散热风机,散热风机用于给内部元器件散热。功能控制盒可以拆卸并适配不同型号的机械抓手;当作业环境发生变化时,也可改变功能控制盒内部的元器件,以满足不同的工作需求。
5、双主机械臂协作机器人更为智能和巡检机房功能更为完善,主要为了提高开关门的效率,提高速度、安全性及成功性,使机器人充满一次电就可巡检完所有机柜,中途不用回到充电桩充电。
6、两个机械臂分为主机械臂和副机械臂,主机械臂为六轴机械臂,六轴机械臂一端与升降机构连接,六轴机械臂另一端安装有可拆卸更换的功能控制盒,功能控制盒上安装有机械抓手,功能控制盒内安装有散热风机,散热风机用于给内部元器件散热,副机械臂包括后悬臂,后悬臂一端安装在上装总成上,后悬臂另一端安装有前悬臂,前悬臂一端安装有强磁铁,上装总成内安装有舵机,舵机用于驱动前悬臂和后悬臂,强磁铁用于吸附柜门。
7、升降机构包括升降杆,升降杆安装在上装总成上,升降杆一侧安装有升降台,升降台与六轴机械臂连接,升降杆另一侧安装有显示屏,显示屏用于进行人机交互。
8、先利用显示屏对内部控制系统设置,设置好机器人的巡检时间、巡检周期及巡检路径。
9、当机器人运动到待检查设备时,控制系统控制独立悬挂轮毂静止,之后,启动主机械臂和升降机构,升降台沿着升降杆上、下运动调整主机械臂的高度,六轴机械臂带动功能控制盒前伸,功能控制盒通过内部集成的检测相机将拍摄的照片传输至控制系统,控制系统通过分析照片自动识别出锁把,之后主机械臂前伸并利用机械抓手打开锁扣并夹住锁把扭开,机械抓手随后再松开锁把收回。
10、上装总成包括上机壳,上机壳安装在下装总成上,上机壳顶端安装有升降杆,上机壳顶端安装有智能云台,上机壳内安装有散热装置,上机壳内安装有环动模块(图中未画出,动环模块在上装侧面的散热条孔内),散热装置用于对升降杆的电机及上机壳内的元器件散热。
11、控制系统控制副机械臂打开,悬臂展开后,前悬臂末端强磁铁吸住柜门后将其打开到最大角度,此时柜门的开合角度已经满足巡检要求,主机械臂控制功能控制盒前伸,在主机械臂和升降台的配合下,功能控制盒内的检测相机对设备进行整体扫描、拍照并将图像数据传输给控制系统,在主机械臂与副机械臂工作的过程中,控制系统实施分析防跌落传感器和超声波传感器反馈的电信号,根据电信号分析出机身的倾斜度,并通过控制独立悬挂轮毂使主机械臂和副机械臂在偏心运动时机身依旧保持平稳,不影响检测相机的成像质量;
12、完成扫描后,主机械臂收回,以免碰撞柜门,此时副机械臂通过强磁铁关闭并抵住柜门,主机械臂带动机械夹爪伸向锁把,进行关门作业,旋好锁把后,主机械臂和副机械臂归位,控制系统控制机器人进入到下一个机柜进行巡检作业,在整个巡检过程中,当控制系统分析出机房环境或机器人本体出现异常时,均会向工作人员发出警报,并自动带领工作人员到达目标点。
13、下装总成包括下机壳,下机壳底端安装有独立悬挂轮毂,下机壳上安装有上机壳,下机壳一侧安装有防跌落传感器和超声波传感器,下机壳另一侧安装有侧屏和充电口,侧屏用于显示下装总成的底盘状态。
14、独立悬挂轮毂包括转向装置、驱动系统、轮毂组件和减震组件。
15、采用四个带有转向装置和减震组件的独立悬挂轮毂,每个独立悬挂轮毂均采用独立的驱动系统,各个独立悬挂轮毂之间独立工作,互不干涉,大大提高了机器人的灵活性和过障能力,并且减震组件有效避免了机械臂和副机械臂偏心运动导致的机身不稳,防止机器人侧翻。
16、控制系统控制独立悬挂轮毂沿预设路径巡检,下机壳上的防跌落传感器和超声波传感器实时将距离信息和机身稳定信息转化为电信号传输至控制系统,控制系统通过分析电信号来控制独立悬挂轮毂内的转向装置、驱动系统、和减震组件,使机器人机身平稳并主动避开各种路障。
17、散热装置包括进风道、出风道、吸风电机和温感探头,温感探头设置在上机壳内的发热元器件散热片上,温感探头上的温度传感器将检测到的温度变化转换为电信号传输至控制系统,控制系统分析电信号,当温度上升时,控制系统开启散热风机,吸风电机安装在上机壳内,出风道和进风道分别设置在上机壳的两侧,吸风电机用于将空气持续从进风道吸入,出风口用于将热风排出。
18、利用进风道和出风道对上装总成内的元器件进行整体散热,避免热气在机器人内部循环,影响元器件的运行;温感探头将检测的数据传送给控制系统,吸风电机在吸入空气的同时,也使吸入的空气流向升降杆的电机处,对电机进行散热。
19、控制系统打开吸风电机将空气吸入,进风道风口的气流检测探头对吸入的气流进行检测,并将检测的数据传送给控制系统。
20、功能控制盒内安装有多种检测相机,检测相机包括双目相机、可见光相机和热成像相机。
21、环动模块包括温度传感器、湿度传感器、噪音传感器、粉尘传感器和电化学传感器。
22、在机器人巡检过程中,环动模块内的各个传感器将自身的数据通过电信号反馈给控制系统,控制系统通过分析这些反馈的数据,对机房温度、湿度、噪音、颗粒物等环境条件进行分析和记录;同时,为动环模块单独配置主动进风循环,使其读取的到的数据更及时和准确。
23、与现有技术相比,本发明所达到的有益效果是:采用四个带有转向装置和减震组件的独立悬挂轮毂,每个独立悬挂轮毂均采用独立的驱动系统,各个独立悬挂轮毂之间独立工作,互不干涉,大大提高了机器人的灵活性和过障能力,并且减震组件有效避免了机械臂和副机械臂偏心运动导致的机身不稳,防止机器人侧翻。
24、利用进风道和出风道对上装总成内的元器件进行整体散热,避免热气在机器人内部循环,影响元器件的运行;利用吸风电机将空气吸入,进风道风口的气流检测探头对吸入的气流进行检测,并将检测的数据传送给控制系统,吸风电机在吸入空气的同时,也使吸入的空气流向升降杆的电机处,对电机进行散热。
25、上装总成和下装总成均进行模块化堆叠设计,各个模块均设有独立的插线端子,当有模块发生故障时,只要取下该模块的插线端子和固定螺丝,即可取走进行单独修理、维护,不影响其他模块的运行。
26、在机器人巡检过程中,利用环动模块内的各个传感器将自身的数据通过电信号反馈给控制系统,控制系统通过分析这些反馈的数据,实现对机房温度、湿度、噪音、颗粒物等环境条件进行分析和记录的目的。
27、利用主机械臂和副机械臂相互配合,达到将柜门任意角度开合的目的,并通过升降机构、六轴机械臂和功能控制盒相互配合实现对设备进行整体扫描的目的。
- 还没有人留言评论。精彩留言会获得点赞!