用于斜拉索表面除冰的智能机械手及方法与流程
本发明涉及机械手,具体涉及用于斜拉索表面除冰的智能机械手及方法。
背景技术:
1、在桥梁运营中,不可避免会出现冰雪等自然天气,当桥梁在遇到冰雪天气及低温时时,斜拉索上会堆积冰、雪等物质,待气温上升时,冰雪开始融化,冰雪和斜拉索的摩擦力变小,冰、雪、水等混合物在重力作用下开始向下滑动以致坠落,冰、雪、水混合物的坠落对于桥梁上的行人和车辆的安全,存在着很大的安全隐患;
2、目前,在对斜拉索表面进行除冰作业的时候,由于斜拉索的高度较高,往往会使用到电动吊篮将工人向斜拉索的顶端进行移动,在移动的过程中对斜拉索的表面冰雪进行清除,斜拉索上的冰被清除之后,斜拉索表面会湿滑,从而使得人工操作具有一定的安全隐患,且效率较低;
3、斜拉索的表面存在护套,当对斜拉索的表面进行破冰时,如通过夹持块进行破冰,因为斜拉索表面的冰存在厚度不均匀性,夹持块在将斜拉索冰块破碎后可能会继续前进对护套造成损伤,护套损伤后,会加剧斜拉索内部的锈蚀。
技术实现思路
1、本发明实施例提供了用于斜拉索表面除冰的智能机械手及方法,以此解决背景技术中所提出的问题。
2、鉴于上述问题,本发明提出的技术方案是:
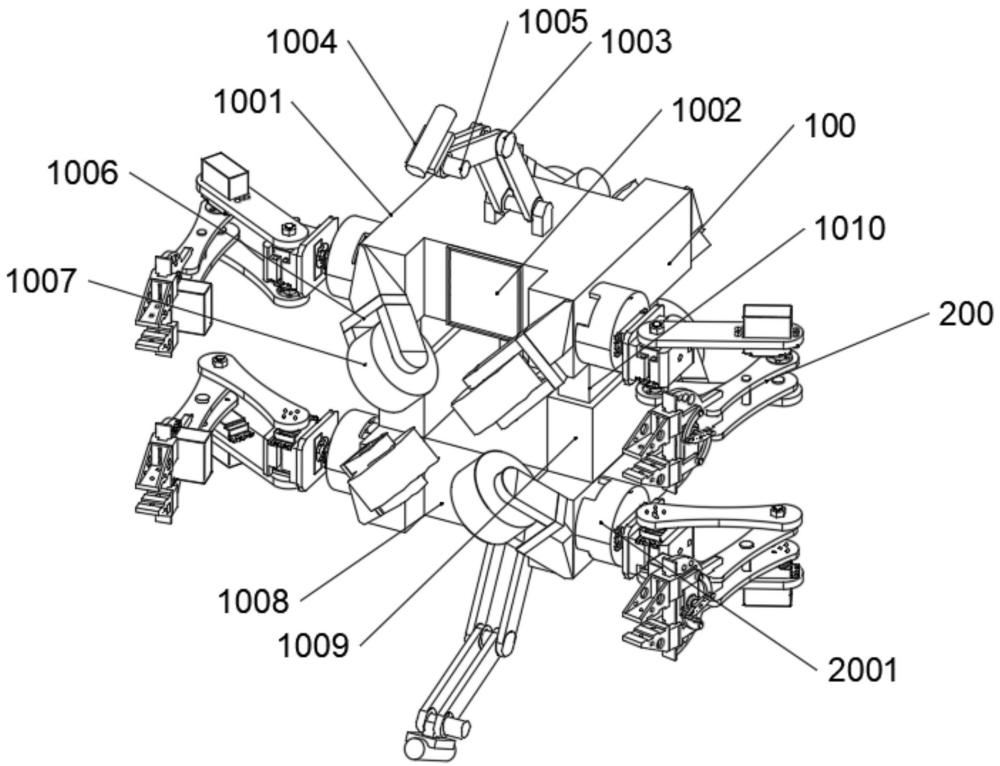
3、用于斜拉索表面除冰的智能机械手,包括:主体和除冰机构,所述除冰机构包括两对底座,所述底座的一侧嵌设安装有第一伺服电机,所述第一伺服电机的输出端套设有安装座,所述安装座的一侧转动连接有第一力臂,所述安装座的另一侧嵌设安装有第二伺服电机,所述第二伺服电机的输出端套设有第二力臂,所述第二力臂的一端内侧转动连接有调节架,所述第一力臂的一端外侧嵌设安装有第三伺服电机,所述第三伺服电机的输出端与调节架一侧传动连接,所述调节架的一端固定安装有固定块,所述固定块的一端滑动安装有一对夹持块。
4、作为本发明的优选技术方案,所述夹持块的内侧均安装有加热块。
5、作为本发明的优选技术方案,所述夹持块的内侧固定连接有压块,所述压块的两侧固定连接有隔空块,所述压块的内侧固定连接有激光发射器和光线强度接收器,光线强度接收器设置在压块的内侧深处,斜拉索表面的冰与隔空块的表面平齐时,激光发射器发出的光线能够经冰面反射进入到光线强度接收器内。
6、在上述设置下,本发明能够防止夹持块在将冰块破碎后继续前进对护套造成损伤,从而避免护套损伤后,加剧斜拉索内部锈蚀的问题,在夹持块滑动对斜拉索表面进行夹持破碎的过程中,激光发射器发出的光线会被冰反射后再被光线强度接收器接收,因为冰存在着较高的反射率,通过冰层反射的光线强度会大于后续继续夹持中通过护套的反射光线强度,由此可以判断夹持块所面对的加持物是冰还是护套,当面对的加持物是护套时,停止夹持块的继续前进,设置的隔空块用于为激光发射器的反射提供间隔空隙,并且能够起到破冰的作用,光线强度接收器设置在压块的内侧深处的设置可以减小光线漫反射的影响;
7、作为本发明的优选技术方案,所述固定块的一侧嵌设安装有第四伺服电机,所述第四伺服电机的输出端贯穿固定块延伸至外部,并套设有连接块。
8、作为本发明的优选技术方案,所述夹持块的一侧均通过销轴铰接有c形连接杆,所述c形连接杆的另一端通过销轴分别与连接块的两端铰接。
9、作为本发明的优选技术方案,所述主体包括上安装架和下安装架,两对所述底座分别设置于上安装架和下安装架的两侧。
10、作为本发明的优选技术方案,所述上安装架的底端两侧均固定安装有插块,所述下安装架的上端面两侧均固定安装有插槽,所述插槽与插槽之间插接,所述插块的底端固定安装有螺杆,所述插槽的内部底端转动连接有套筒,所述螺杆与套筒之间螺纹连接。
11、作为本发明的优选技术方案,所述插槽的内部一侧固定安装有第五伺服电机,所述第五伺服电机的输出端套设有第一锥齿,所述套筒的底端套设有第二锥齿,所述第二锥齿与第一锥齿之间相互啮合。
12、作为本发明的优选技术方案,所述上安装架和下安装架的一端均固定安装有一对第一活动座,所述第一活动座的内部均转动连接有从动轮,所述上安装架和下安装架的另一端均固定安装有一对第二活动座,所述第二活动座的内部均转动连接有驱动轮,所述第二活动座的一侧均固定安装有第六伺服电机,所述第六伺服电机的输出端与驱动轮之间传动连接。
13、作为本发明的优选技术方案,所述上安装架的上端与下安装架的底端均安装有固定架,所述固定架的一端转动连接有摄像头,所述固定架的一端外侧均固定安装有第七伺服电机,所述第七伺服电机与摄像头之间传动连接。
14、作为本发明的优选技术方案,所述上安装架的一端固定安装有plc控制器,所述plc控制器的内部设置有无线信号收发器,所述plc控制器的输出端与第一伺服电机、第二伺服电机、第三伺服电机、第四伺服电机、第五伺服电机、第六伺服电机、第七伺服电机、摄像头和加热块的输入端之间通信连接。
15、另一方面,本发明提供用于斜拉索表面除冰的智能机械手的使用方法,包括以下步骤:
16、s1,安装:首先将斜拉索底端表面的结冰去除,然后将上安装架放置于斜拉索的上端,使其两端安装的从动轮与驱动轮与斜拉索的表面相抵,上安装架的底端两侧安装有插块,下安装架的上端两侧安装有插槽,将插块与插槽插接之后,下安装架则位于斜拉索的下方,通过启动第五伺服电机,使其带动第一锥齿转动,第一锥齿与套设在套筒底端的第二锥齿啮合,进而可带动套筒转动,套筒与插块底端安装的螺杆之间螺纹连接,进而可使得插块在插槽内部固定,锁紧上安装架和下安装架之间的间距,提高从动轮与驱动轮与斜拉索之间的摩擦力,此时,通过启动第六伺服电机,即可带动驱动轮旋转,进而推动上安装架和下安装架在斜拉索上进行移动;
17、s2,除冰:上安装架和下安装架的两侧均安装有底座,底座的内侧嵌设安装的第一伺服电机输出端套设有安装座,进而可调节安装座的转向,通过在安装座一侧安装第二伺服电机,其输出端套设第二力臂,第二力臂的一端内侧转动连接有调节架,通过在安装座的一侧转动连接第一力臂,并在其一端外侧安装第三伺服电机,使其输出端与调节架一侧传动连接,进而通过第三伺服电机可控制调节架的旋转角度,并且通过启动第二伺服电机,也可调节第二力臂和第一力臂的转动角度,通过在调节架的一端安装固定块,并在固定块的一端滑动安装一对夹持块,夹持块的一侧均铰接有c形连接杆,其一端分别与连接块的两端铰接,进而当第四伺服电机带动连接块转动的时候,可使得夹持块相对运动,将斜拉索表面凝结的冰夹碎,并且夹持块的内侧均安装有加热块,利用加热块可对冰进行融化,辅助夹持块将斜拉索表面的冰去除;
18、s3,控制:上安装架上端和下安装架底端均安装有固定架,固定架的一端转动连接摄像头,通过启动第七伺服电机,可带动摄像头旋转,进而调节其拍摄角度,通过安装plc控制器,其内部设置有无线信号收发器,方便使用这个通过无线网络通过plc控制器远程控制设备运行,并且通过plc控制器将摄像头的拍摄画面处理分析,可自动控制除冰机构自动化运行,利用夹持块与斜拉索表面的冰进行去除。
19、相对于现有技术而言,本发明的有益效果是:通过在上安装架和下安装架两端分别安装从动轮和驱动轮,当第六伺服电机工作的时候可带动驱动轮转动,从而使得上安装架和下安装架在斜拉索上进行移动,通过在上安装架和下安装架两侧安装底座,通过启动其内部安装的第一伺服电机,可控制安装座转向,通过启动第二伺服电机,可使得第二力臂与第一力臂转动调节,通过启动第三伺服电机,可使得调节架转动调节,通过启动第四伺服电机,可使得连接块转动,从而利用连接块带动c形连接杆转动,c形连接杆与固定块一端滑动安装的夹持块铰接,因此可使得一对夹持块相对运动,将斜拉索上的冰夹碎,并且通过在夹持块的内侧安装加热块,可对冰进行融化,提高夹持块对斜拉索表面冰的清理效果,通过启动第七伺服电机,可调节摄像头的转向,从而方便的斜拉索的表面进行拍摄,方便plc控制器对拍摄画面进行处理分析,进而控制夹持块对冰进行夹碎,通过启动第五伺服电机,使其工作的时候可通过第一锥齿带动第二锥齿旋转,进而使得套筒转动,套筒与螺杆螺纹连接,从而使得上安装架与下安装架之间连接紧固,增加从动轮和驱动力与斜拉索表面的摩擦力,使其更好的在斜拉索上移动,通过安装在plc控制器内部设置无线信号收发器,方便使用者在斜拉索底部远程控制,在除冰的同时,降低了人工除冰时带来的安全隐患;
20、本发明能够防止夹持块在将冰块破碎后继续前进对护套造成损伤,从而避免护套损伤后,加剧斜拉索内部锈蚀的问题,在夹持块滑动对斜拉索表面进行夹持破碎的过程中,激光发射器发出的光线会被冰反射后再被光线强度接收器接收,因为冰存在着较高的反射率,通过冰层反射的光线强度会大于后续继续夹持中通过护套的反射光线强度,由此可以判断夹持块所面对的加持物是冰还是护套,当面对的加持物是护套时,停止夹持块的继续前进,设置的隔空块用于为激光发射器的反射提供间隔空隙,并且能够起到破冰的作用,光线强度接收器设置在压块的内侧深处的设置可以减小光线漫反射的影响。
21、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!